оэ оэ
о
00
&
Изобретение относится к деревообрабатывающему производству.
Известно устройство, в котором при прохождении определенной длины шпона, контролируемой измерительным валиком, включается электромагнитная муфта, связывающая кинематически режущий инструмент с электроприводом. В результате осуществляется рубка листа шпона. Устройство обеспечивает более высокую производительность, позволяет сократить расход сырья за счет точности рубки, связанной с более высокой точностью замера длины листа с помощью измерительного валика, однако при этом сохраняется инерция обработки команды реза, определяемая электромагнитными процессами в элементах автоматики через цепь: датчик длин - электромагнитная муфта - электропривод ножа. Кроме того, использование одного измерительного валика, выдающего команду на рубку шпона, затрудняет наладку устройства на требуемый размер листа.
Цель изобретения - повышение точности рубки ленты и снижение расхода сырья.
На фиг. 1 изображено предлагаемое устройство, общий вид; на фиг. 2 - блок-схема блока адаптивного управления приводом ножа реза.
В устройстве лента шпона 1, перемещаемая подающим роликом 2, приводимым в движение приводом 3 и прижимаемая роликом 4 с приводом 5, вращает измерительный валик 6, соединенный с блоком 7 адаптивного управления, приводом 8 ножа Р приводом 5 прижимного ролика 4 и датчика 10 фиксации момента времени прохождения передней кромкой заданной зоны.
Выходы датчика измерительного валика б соединены через коммутаторы 11 и 12 со входами дифференциатора 13, счетчика 14 и сумматора 15. Выходы датчика 10 фиксации момента времени прохождения передней кромкой шпона заданной зоны соединены с входами управления коммутаторов 12 и 16. Выход дифференциатора 13 соединен с управляющим входом коммутатора 11 (сброс на нуль). Выход сумматора 15 соединен с выходом блока 18 задания длины листа 18. Выход блока 17 сравнения соединен с релейным регулятором 19, формирующим команду на приводы реза и подъема прижимных роликов. Выход регулятора 19 соединен со входом дифференциатора 20, с выхода которого формируется импульс, переводящий в нулевое состояние блоки 12, 14 и 15 и во включенное состояние коммутатор 11.
Устройство работает следующим образом.
При достижении передней кромки шпона 1 зоны датчика 10 поступает команда с датчика 10 на коммутатор 12 для соединения датчика измерительного валика 6 с сум5 матором 15. На сумматоре 15 интегрируется длина проходящего шпона. При достижении длины шпона заданному значению длины листа блок 17 сравнения формирует сигнал на релейный регулятор 19. Сигнал
Q релейного регулятора 19 через дифференциатор 20 сбрасывает в нулевое значение показания сумматора 15, в результате чего счетчик 14 отключает коммутаторы 12 и 16 и подключает через коммутатор 11 датчик измерительного валика 6 к счетчику 14 и
5 дифференциатору 13.
До момента реза, перемещающийся по инерции шпон 1 воздействует на измерительный валик 6. Путь пройденный шпоном
до момента реза интегрируется счетчиком 14. Дифференциатор 13 при остановке движения шпона формирует нулевой сигнал на отключение коммутатора 11. Величина пройденного пути шпоном 1 от момента подачи команды на рез до самого реза сохраняет5 ся в счетчике 14. При очередном движении шпона, т. е. в момент пересечения передней кромкой зоны датчика 10, формируются команды на включение коммутаторов 12 и 16. В итоге результат счетчика 14 суммируется в сумматоре 15 с текущим резуль0 татом измерения длины очередного листа. В сумматоре 15 формируется результат с учетом коррекции на инерционное движение шпона. Таким образом, происходит адаптация команд на привод реза, а следовательно, стабилизация реза до величины
5 прогрешности измерений длины.
Формула изобретения
Устройство стабилизации рубки ленты 0 шпона, содержащее подающий и горизонтальный ролики с приводами, перед которыми установлен измерительный валик, а после них смонтирован нож с приводом, отличающееся тем, что, с целью повышения точности рубки ленты и снижения расхода 5 сырья, в него введены датчик фиксации момента прохождения передней кромки шпона и блок адаптивного управления, первый выход которого соединен с приводом прижимного ролика, а первый вход сообщен с измерительным валиком, второй вход блока адаптивного управления связан с датчиком фиксации момента прохождения передней кромки шпонки, а второй выход подключен к приводу ножа.
7777777777777} ( Л ЧЩ у/////////
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для РУБКИ ЛЕНТЫ ШПОНА НА ФОРМАТНЫЕЛИСТЫ | 1971 |
|
SU308870A1 |
| УСТРОЙСТВО для РУБКИ ЛЕНТЫ | 1972 |
|
SU347198A1 |
| Устройство для резки листового материала | 1984 |
|
SU1155454A1 |
| СТАНОК ДЛЯ ВЗАИМНО ПАРАЛЛЕЛЬНОЙ ПРИРУБКИ КРОМОК ЛИСТОВОГО МАТЕРИАЛА | 1967 |
|
SU197140A1 |
| УСТАНОВКА ДЛЯ ПЕРЕРАБОТКИ КУСКОВОГО ШПОНА и т. п. ЛИСТОВОГО МАТЕРИАЛА В ПОЛНОФОРМАТНЫЕ ЛИСТЫ | 1968 |
|
SU217631A1 |
| Устройство для рубки ленты шпона на форматные листы | 1980 |
|
SU935293A1 |
| ЛИНИЯ ДЛЯ ТРАНСПОРТИРОВКИ ЛУЩЕНОГО ШПОНА, РУБКИ И УКЛАДКИ ЛИСТОВ В СТОПУ | 2007 |
|
RU2348516C1 |
| Устройство для поперечной резки синтетического шпона | 1982 |
|
SU1096100A1 |
| Устройство управления безупорным мерным резом полосы | 1978 |
|
SU774832A1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ДЕТАЛЕЙ ИЗ ПРУТКОВОГО МАТЕРИАЛА | 1991 |
|
RU2009792C1 |

Изобретение относится к деревообрабатывающему производству. Целью изобретения является повышение точности рубки ленты и снижение расхода сырья. Устройство стабилизации рубки ленты шпона содержит ленту шпона 1, подающий ролик 2, привод 3, прижимной ролик 4 с приводом 5, измерительный валик 6, блок 7 адаптивного управления, привод 8 ножа 9, датчик 10 фиксации момента времени прохождения передней кромкой заданной зоны. При достижении передней кромки шпона 1 зоны датчика 10 поступает команда с датчика 10 на коммутатор 12 для соединения датчика измерительного вала 6 с сумматором 15. В сумматоре 15 формируется результат с учетом коррекции на инерционное движение шпона. Таким образом, происходит адаптация команд на привод реза, а следовательно, стабилизация реза до величины погрешности измерений длины. 1 з. п. ф-лы, 2 ил.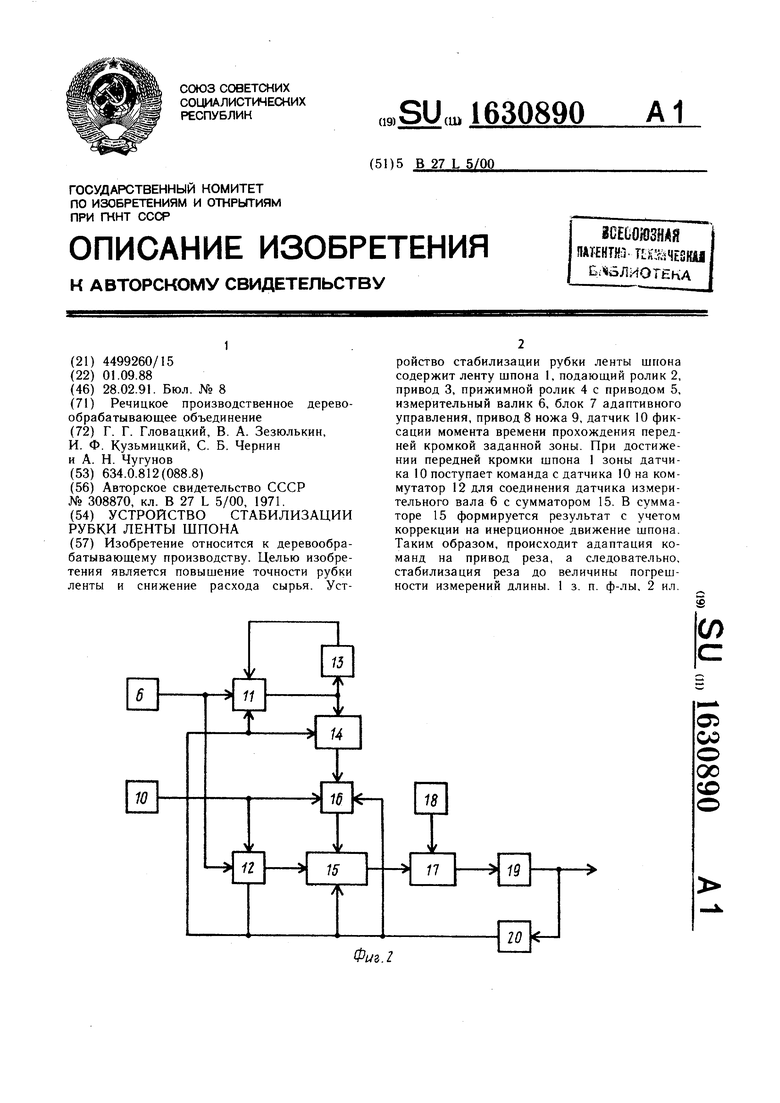
Фиг л
| УСТРОЙСТВО для РУБКИ ЛЕНТЫ ШПОНА НА ФОРМАТНЫЕЛИСТЫ | 0 |
|
SU308870A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
