Изобретение относится к машиностроению, в частности к конструкции роторных и роторно-конвейерных линий для изготовления изделий с проволочными выводами или арматурой, и является усовершенствованием основного изобретения по автисв № 1535667
Цель изобретения - повышение качества за счет обеспечения возможности контроля параметров подаваемого гибкого элемента и снижение расхода материала
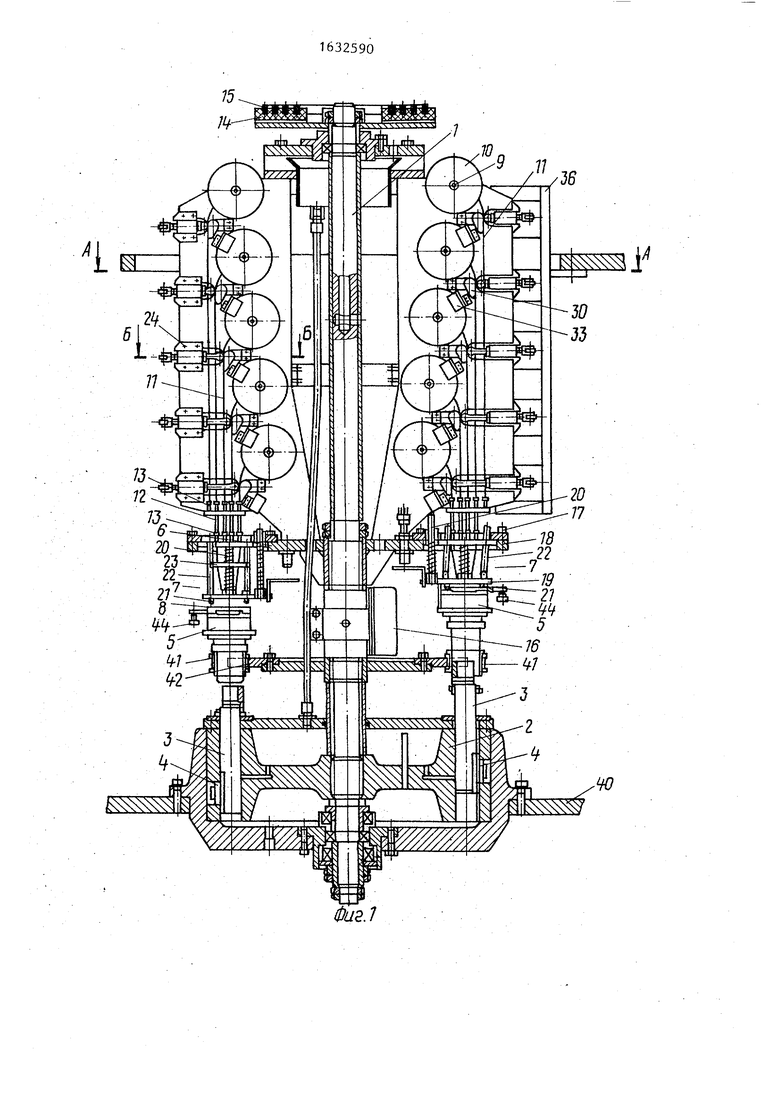
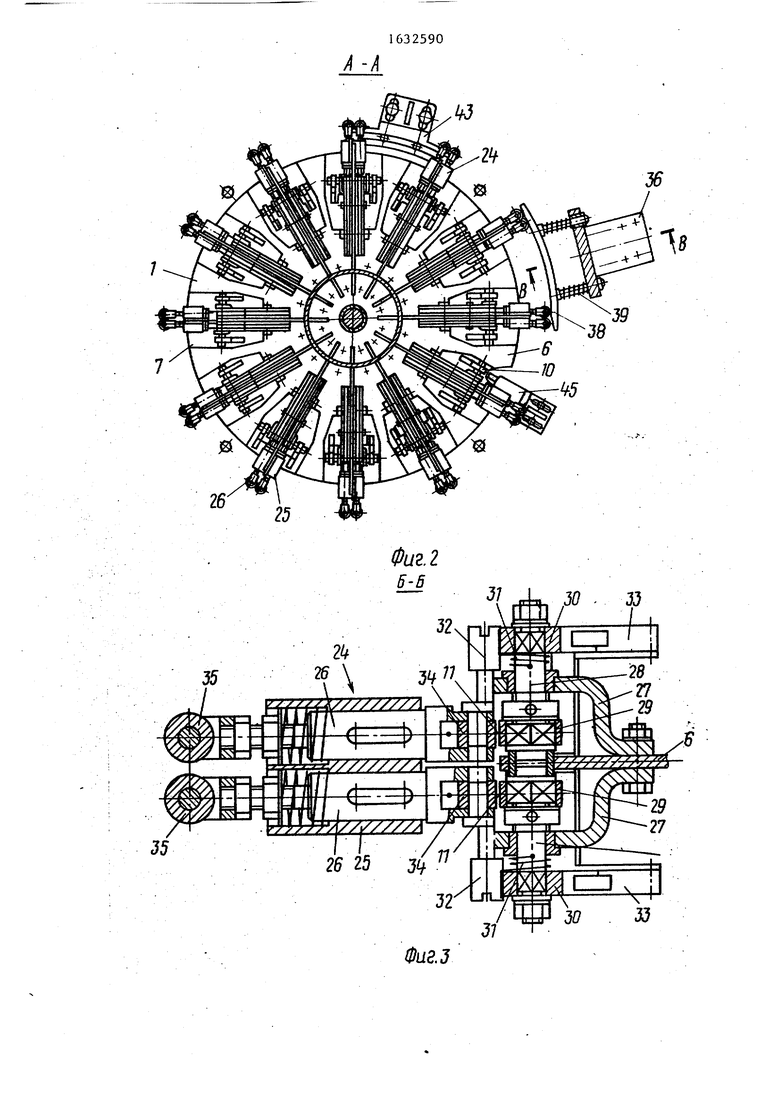
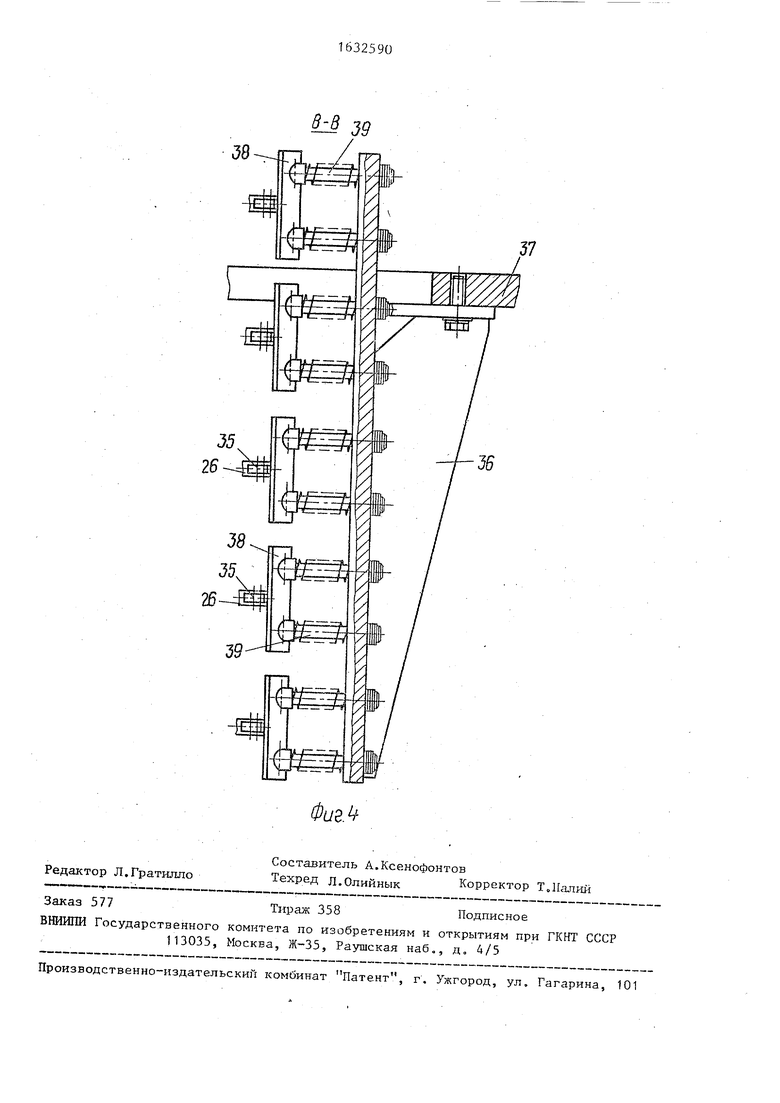
На изображен рабочий роторэ общий вид, продольный разрез; на - разрез А-А на на разрез Б-Б на фиг„1; на - разрез В-В на
Рабочий ротор роторной машины состоит из центрального вала 1, на нижнем конце которого жестко закреплен барабан 2, снабженный ползунами 3, получающими перемещение от пазовых кулачков 4 и взаимодействующими со сборочными формами 5„
В средней части вала 1 жестко закреплен блокодержатель 6, в гнездах которого установлены инструментальные блоки 7 по числу ползунов в барабане, взаимодействующие с торцовой поверхностью 8 форм 5. В верхней части блокодержателя 6 жестко посажены катушкодержатели 9 с укрепленными на них питающими катушками 10, несущими гибкий элемент (арматуру) 11, направляемый к месту его подачи в форму 5 по гибким каналам 12 при помощи цанг 13 Каналы 12 выполнены
о
00 1C
сл
со
14)
навивкой из пружинной проволоки и закреплены в подающих цангах 13.
В верхней части центрального вала 1 установлен коллектор 14 с контакт- ными кольцами 15, подающими электрическое питание на панель 16 системы контроля и управления ротора0
Инструментальный блок 7 верхней плитой 17 закреплен- в гнезде блоко- держателя 6 и содержит подвижные среднюю 18 и нижнюю 19 плиты, имеющие возможность перемещения по направляющим колонкам 20„ На средней плите 18 установлены подающие цанги 13, а на нижней плите 19 установлены направля-. ющие 21 формы 5 и две защелки 22, объединенные перемычкой 23 и входящие в пазы средней плиты 18„ Защелки 22 шарнирно закреплены на нижней плите 19 и под действием пружин кручения (не показаны) прижаты к торцовой поверхности пазов средней плиты 180
Гибкие каналы 12 в инструментальном блоке закреплены в цангах 13 средней плиты 18 и в отверстиях нижней плиты 19 о
На блокодержателе 6 установлены сдвоенные контрольные станции 24, количество которых соответствует чис- лу подаваемых в форму гибких элементов 110 Корпус 25 контрольной станции, в котором перемещается подпружиненный ползун 26, жестко крепится на рабочих позициях блокодержателя 6„ Здесь же жестко крепятся кронштейны 27 контрольной станции 24,в которых шар- нирно закреплены поворотные оси 28,на кторых жестко установлены ррлики 29, взаимодействующие с гибким элементом 11, и поворотный рычаг 30, в исходном положении пружиной 31 кручения прижимаемой к ограничителю 32 „ Контроль- t ные станции 24 включают также конеч- jaie выключатели 33, взаимодействующие % поворотным рычагом 30.
На одном конце ползуна 26 закреплен вращающийся ролик 34, взаимодействующий с гибким элементом 11, a на другом конце установлен вращающийся ролик 35, взаимодействующий с механизмом включения системы контроля, состоящим-из кронштейна 36,жестко за- крепленного на плите 37 станины роторной линии, и подпружиненных сегментных колодок 38, перемещающихся на колонках 39. Количество сегментных колодок 38 соответствует числу установленных на одной рабочей позиции кон-, трольных станцийо
Рабочий ротор установлен на плитах 37 и 40 станины роторной линии и получает вращение от цепи 41, в гнездах которой установлены формы 5, взаимодействующей со звездочкой 42 центрального вала 1 роторао На плите 40 станины установлены механизм 43 от резки арматуры, взаимдействующий с роликом 44 ножа формы, и механизм 45 сброса защелки инструментального блока.
Рабочий ротор роторной машины работает следующим образомо
При вращении ротора ползуны 3 периодически поднимаются вверх и поднимают формы 5, которые на позиции подачи арматуры в форму взаимодейстг вуют с нижней плитой 19 инструментального блока 7. При этом направляющие 21 входят в отверстия формы 5 и центрируют последнюю относительно подающих каналов 12„ Дальнейшим движением вверх форма 5 поднимает нижнюю плиту 19 инструментального блока 7, сжимая пружины направляющих колонок 20„ Подающие каналы 12 сжимаются и арматура проходит в загрузочные отверстия формы 5, так как цанги 13, установленные на средней плите 18, препятствуют перемещению арматуры вверх.
При подъеме нижней плиты 19 инструментального блока 7 защелки 22 проходят пазы средней плиты 18 и останавливаются над нейо
В таком положении инструментального блока 7 ротор, вращаясь, приходит в позицию отрезки арматуры,, На этой позиции при вращении ротора ролик 44 ножа формы 5 (не показан) перемещается по криволинейному пазу механизма 43 отрезки и отрезает все гибкие элементы, вощедшие в форму.
При дальнейшем повороте ротор приходит в позицию включения системы контроля. На этой позиции при вращении ротора ролика 35 ползунов 26 ..ч- станций контроля взаимодействуют с сегментными колодками 38 механизма включения системы контроля. Под действием этих колодок ползуны перемещаются в сторону подаваемого гибкого элемента и роликами 34 прижимают их к роликам 29 поворотных осей 28.
Одновременно ползуны 3 барабана 2 перемещаются вниз и нижняя плита 19
инструментального блока 7 под действием пружин направляющих колодок 20 опускается Не отрезанная часть арматуры втягивается в гибкие каналы 12 Одновременно с нижней плитой 19 опускаются и защелки 22„ При этом своими выступами они захватывают среднюю плиту 18 и также перемещают ее вниз на величину, равную от- резанной части арматуры Цанги 13, установленные на средней плите 18, зажимают арматуру и подают ее вниз, восполняя отрезанный участок.
Арматура, зажатая между роликами 34 и 29, перемещаясь, поворачивает эти ролики на угол, соответствующий длине подаваемого отрезка При этом ролик 29, жестко закрепленный на оси 28, поворачивает ее и рычаг 30 нажимает на конечный выключатель 33 Последний, срабатывая, выдает в систему управления линией сигнал о том, что подана арматура заданной длины„ В случае проскальзывания гибкого эле- мента в подающих цангах ось 28 повернется на угол меньше заданного и рычаг 30 не дойдет до конечного выключателя 33; в системе управления линией будет отработан сигнал о неис-: правности Такой же сигнал будет отработан при обрыве или преждевременном израсходовании на одной из питающих катушек гибкого элемента В этом случае между роликами 34 и 29 гибкий элемент будет отсутствовать и ролики, а следовательно, и ось 28 не провернутсяо
Дальнейшим поворотом ротор приходит на позицию сброса защелки На этой позиции механизм 45 сброса защелки воздействует на одну из защелок 22 инструментального блока 7, освобождая среднюю плиту 18.Так как обе защелки 22 соединены перемычкой 23, они одновременно отклоняются, средняя плита 18 освобождается и под действием пружин направляющих колонок 20 возвращается в исходное положение При этом цанги 13, установленные на средней плите 18, свободно перемещаются по арматуре вверх, а цанги 13 установленные на блокодержателе 6, оказываются закрытыми для перемещения арматуры,
5
0
5 0
0 5 0 5
5
Таким образом, все механизмы возвращаются в исходное положение и -. цикл повторяется о
Предложенный рабочий ротор роторной машины за счет обеспечения возможности контроля параметров подаваемого гибкого элемента повышает ка- / чество и снижает брак изготавливаемых изделий, а также уменьшает расход материала для арматуры,
Формула изобретения
1„ Рабочий ротор роторной машины по авт ев, № 1535667, отличающийся тем, что, с целью повышения качества за счет обеспечения возможности контроля параметров подаваемого гибкого элемента и снижения расхода материала, он дополнительно снабжен стационарно установленным на станине роторной линии механизмом включения системы контроля и системой контроля, включающей контрольные станции, жестко закрепленные на рабочих позициях блокодержателя и состоящие из корпуса, в котором установлен с возможностью осевого перемещения от механизма включения системы контроля ползун , служащий для взаимодействия с подаваемым гибким элементом, и поворотной оси, на которой жестко закреплен ролик, также служагщн для взаимодействия с гибким элементом, и рычаг, установленный с возможностью взаимодействия в конечном положении с датчиком конечного положения„
2 о Ротор по п„1, отличающийся тем, что контрольные станции выполнены сдвоеннымио
Зо Ротор по пп„ 1 и 2, отличающийся тем, что контрольные станции снабжены средством для их периодического включения в работу
4 Ротор по пп. 1-3, отличающийся тем, что механизи включения системы контроля установлен с возможностью взаимодействия со всеми контрольными станциями одной рабочей позиции одновременно и состоит из кронштейна и подающих сегментных колодок
$ SSS§
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочий ротор роторной машины | 1987 |
|
SU1535667A1 |
| Ротор для механической обработки заготовок | 1973 |
|
SU442043A1 |
| Автоматическая роторная машина для заделки гибких элементов в тело изделия посредством конопатки | 1989 |
|
SU1639937A1 |
| Рабочий ротор | 1985 |
|
SU1306689A1 |
| АВТОМАТИЧЕСКАЯ РОТОРНАЯ МАШИНА | 1965 |
|
SU216096A1 |
| Роторный автомат для нарезания резьбы в гайках | 1982 |
|
SU1076224A1 |
| Роторный автомат для нарезания резьбы в гайках | 1990 |
|
SU1822814A1 |
| Роторная машина для гидроформовки сильфонов | 1990 |
|
SU1745392A1 |
| РОТОРНО-КОНВЕЙЕРНАЯ ЛИНИЯ ОЧЕХЛЕНИЯ ИЗДЕЛИЙ ТЕРМОУСАЖИВАЕМОЙ ТРУБКОЙ | 1991 |
|
RU2026185C1 |
| Устройство для предохранения роторной машины от перегрузки | 1986 |
|
SU1449318A1 |
Изобретение относится к роторно- конвейерным линиям для изготовления изделий из термопластов, армированных проволочными выводами, методом - литья под давлением и позволяет повысить качество и снизить расход материала за счет обеспечения возможности контроля параметров подаваемой арматуры Рабочий ротор содержит центральный вал, барабан с ползунами, перемещаемыми от кулачков и взаимо- . действующими с формами На валу закреплен блокодержатель, на котором установлены инструментальные блоки, питающие катушки с гибким элементом и станции контроля длины подаваемого в формы гибкого элемента На станине установлен механизм включения системы контроля, взаимодействующий со станциями контроля При отсутствии гибкого элемента, при его обрыве или подаче длины меньше заданной в систему управления линией выдается сигнал неисправности 3 з.п ф-лы, 4 ил, (Л
oeszcgi
tt
36
Фиг.з
Ы 39
| Рабочий ротор роторной машины | 1987 |
|
SU1535667A1 |
