о
G3 00
ч
00 О5
рез преобразователь 9 код-напряжение подается на дополнительный вход сумматора 3. Темп разгона двигателя 1 снижается, дальнейшее изменение ско,ростй происходит с заданным перерегулированием, что обеспечивает оптиi мальный по быстродействию переходный процесс. 3 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Дискретно-цифровой электропривод | 1985 |
|
SU1350800A1 |
| ЭЛЕКТРОПРИВОД | 1991 |
|
RU2025035C1 |
| Устройство для управления асинхронным электродвигателем | 1990 |
|
SU1734184A2 |
| Нереверсивный вентильный электропривод постоянного тока | 1981 |
|
SU1070679A1 |
| Способ определения электромагнитной постоянной времени якорной цепи электродвигателя постоянного тока | 1985 |
|
SU1307525A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| Регулятор скорости для вентильного электропривода постоянного тока | 1977 |
|
SU738084A1 |
| Электропривод постоянного тока | 1983 |
|
SU1102001A1 |
| Устройство управления многодвигательным электроприводом постоянного тока бумагоделательной машины | 1987 |
|
SU1444436A1 |
| Устройство для управления асинхронным электродвигателем | 1984 |
|
SU1252898A1 |
Изобретение.относится к электротехнике, в частности к управлению нелинейными автоматическими системами, и может найти применение в системах адаптивного управления электроприводами. Цель изобретения - улучшение динамических характеристик электропривода. Электропривод содержит задатчик 2 скорости. При скачке задания скорость электродвигателя 1 начинает расти. Узел 8 вычисления производной в моменты времени,опре- деляемые генератором 15 импульсов, вычисляет производную скорости.Узел 11 вычисления разности вычисляет разность между сигналом задания и скоростью двигателя с узла 6 измерения скорости. Разность преобразуется в преобразователе I2 напряжение-код в цифровой код и подается ка вход постоянного запоминающего устройства 13, в котором записана функция управления для заданной величины перерегулирования. В момент сравнения в узле 14 сравнения реальной производной и рассчитанной замыкается ключ 10 и сигнал с выхода узла 8 ML tg льъ.
Изобретение относится к электротехнике, в частности к технике управления нелинейными автоматическими системами, и может быть использовано в системах адаптивного управления электроприводами.
Цель изобретения - улучшение динамических характеристик электропривода.
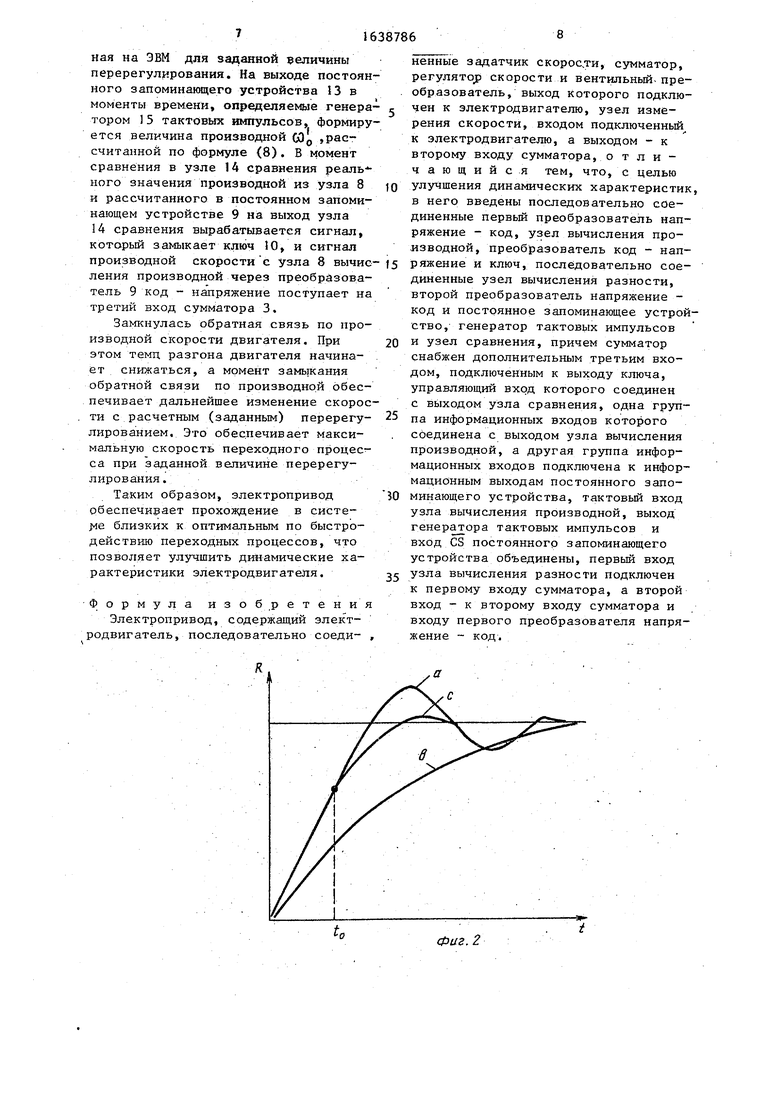
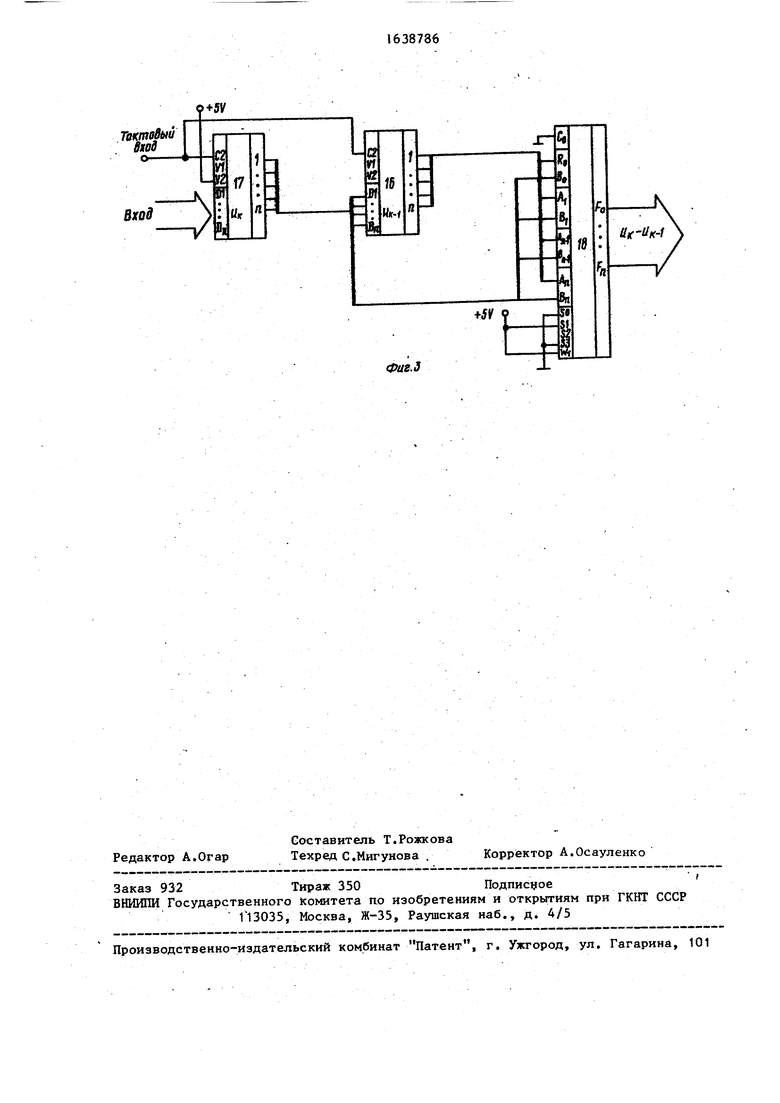
На фиг.1 представлена блок-схема электропривода; на фиг.2 - кривые переходных процессов при разомкнутом ключе (а), при замкнутом ключе (Ъ) и при замыкании ключа в функции переходного процесса (с){ на фиг.З - схема узла вычисления производной.
Электропривод (фиг.О содержит электродвигатель 1, последовательно соединенные задатчик 2 скорости,сумма тор 3, регулятор А скорости и вентильный преобразователь 5, выход которого подключен к электродвигателю I. Узел 6 измерения скорости входом подключен к электродвигателю 1, а выходом - к второму входу сумматора 3. Кроме того, электропривод содержит последовательно соединенные первый преобразователь 7 напряжение - код, узел 8 вычисления производной, преобразователь 9 код-напряжение и ключ 10. Узел 11 вычисления разности последовательно соединен с вторым преобразователем 12 напряжение - код и постоянным запоминающим устройством 13. Сумматор 3 снабжен дополнительным третьим входом, подключенным к выходу ключа 10, управляющий вход которого соединен с выходом узла 14 сравнения. Одна группа информационных входов узла 14 сравнения соединена с выходом узла 8 вычисления производной, а другая группа информационных входов подключена к информационным выходам постоянного запоминающего устройства 13. Тактовый вход узла 8 вычисления производной, выход генератора 15 тактовых импульсов и вход CS постоянного запоминающего устройства 13 объединены. Первый вход узла 11 вычисления разности подключен к первому входу сумматора 3, а второй вход - к второму входу сумматора 3 и входу первого преобразователя 7 напряжение - код. Узел 8 вычисления производной
(фиг.З) может содержать, например, узел 16 памяти Иk,-слова, узел 17 памяти И -слова и арифметико-логическое устройство 18,Электропривод работает следуюЩим образом.
Известно, что переходной процесс в регулируемом электроприводе без стабилизирующих устройств, обладающем большим коэффициентом усиления,
имеет сильно колебательный либо неустойчивый характер, однако время достижения установившегося значения достаточно мало (фиг.2, кривая а). При наличии нелинейной обратной связи по скорости процесс становится монотонным, перерегулирование мало, однако время достижения установившегося значения резко возрастает (фиг.2, кривая Ь).
Если выбрать характеристику нелинейной обратной связи такой, чтобы она не действовала в начале переходного процесса и подключалась по мере подхода выходной координаты к установившемуся значению, то можно получить переходной процесс с заданной величиной перерегулирования и с быстродействием, близким к оптимальному.
Рассмотрим реакцию регулируемого электропривода на скачок задания R. При замкнутом ключе 10 передаточная функция регулируемого электропривода
W (1) где
т - . Ј-- -iM/Kj. . 1 N К, 2Т
Ki Kfic квл
К,, - коэффициент усиления дифференцирующего звена;
коэффициент усиления пропорционального регулятора 4 скорости;
коэффициент усиления вентиль- 5
ного преобразователя 5; электромеханическая постоянная времени;
г -ШТ J, 2-1
u)(t) R l + Се -sin ( + 0)J,(2)
4(.I l ± Qji aljCM0-I Rl3i.
4ггу
О,. 4l -%г (ОЗо- R)
0 arctg --- т -----уТаким образом, значения выходной координаты С00 и ее первой производной (00 в момент t0 (фиг.2) замыка- .йия ключа 10 полностью определяют дальнейшее состояние системы независимо от того, каким образом система
i-ft/TI . v-z
63 t -RCesin (------- t + 9
arctg тЕ-Е.в
«вис
4 -Г/т
При этом перерегулирование
CJ-uXt,,.) - R R- C-
-макс
Таким образом, в неявном виде пе00и
ререгулирование зависит от С00 R. Значения этих параметров однозначно определяют величину перерегулирования.
Решение транцендентного уравнения (7) позволяет получить зависимость
С00- R
f«V
для заданного перерегулирования.Таким образом, если в момент подачи скачка задания ключ 10 разомкнут, а в Функции управления (8) его замкнуть,то можно получить переходной процесс с близким к оптимальному быстродействием и наперед заданным перерегулированием.
Т л - электромагнитная постоянная
времени;
р - оператор Лапласа. Переходной процесс описывается учетом начальных условий выражением
(3)
(4)
достигла этой точки и каково ее предыдущее состояние. Максимальное перерегулирование (Г
возникает в момент tMatcc, когда иГ(Сдлаее) О Возьмем производную от (2) и приравняем ее нулю:
Ji-t
.-..
-);
(5)
ffiwuc
Ij fc,2
sin (arctg - --yf-).
(7)
45
50
При скачке задания на выходе за- датчика 2 скорости скорость двигателя начинает расти. Узел 8 вычисления производной вычисляет в моменты времени, определяемые генератором 15 импульсов, производную скорости, которая подается на вход А узла 14 сравнения. Одновременно узел 11 вычисления разности вычисляет разность мезеду сигналом задания с выхода за- датчика 2 скорости и скоростью двигателя с узла 6 измерения скорости. Величина разности преобразуется преобразователем 12 напряжение - код 55 в цифровой код и подается на вход постоянного запоминающего устройства 13, в котором предварительно записана зависимость (8), рассмотренная на ЭВМ для заданной величины перерегулирования. На выходе постоянного запоминающего устройства 53 в моменты времени, определяемые генера- тором 15 тактовых импульсов, формируется величина производной С00 рассчитанной по формуле (8). В момент сравнения в узле 14 сравнения реаль - ного значения производной из узла 8 и рассчитанного в постоянном запоминающем устройстве 9 на выход узла 14 сравнения вырабатывается сигнал, который замыкает ключ 10, и сигнал производной скорости с узла 8 вычис- ления производной через преобразователь 9 код - напряжение поступает на третий вход сумматора 3.
Замкнулась обратная связь по производной скорости двигателя. При этом темд разгона двигателя начинает снижаться, а момент замыкания обратной связи по производной обеспечивает дальнейшее изменение скорости с расчетным (заданным) перерегу- лированием. Это обеспечивает максимальную скорость переходного процесса при заданной величине перерегулирования .
Таким образом, электропривод обеспечивает прохождение в систе- ie близких к оптимальным по быстродействию переходных процессов, что позволяет улучшить динамические характеристики электродвигателя.
Формула изобретения
Электропривод, содержащий электродвигатель, последовательно соеди- ,
ненные задатчик скорости, сумматор, регулято р скорости и вентильный- преобразователь, выход которого подключен к электродвигателю, узел измерения скорости, входом подключенный, к электродвигателю, а выходом - к второму входу сумматора, отличающийся тем, что, с целью улучшения динамических характеристик в него введены последовательно соединенные первый преобразователь напряжение - код, узел вычисления производной, преобразователь код - напряжение и ключ, последовательно соединенные узел вычисления разности, второй преобразователь напряжение - код и постоянное запоминающее устройство, генератор тактовых импульсов и узел сравнения, причем сумматор снабжен дополнительным третьим входом, подключенным к выходу ключа, управляющий вход которого соединен с выходом узла сравнения, одна группа информационных входов которого соединена с выходом узла вычисления производной, а другая группа информационных входов подключена к информационным выходам постоянного запоминающего устройства, тактовый вход узла вычисления производной, выход генератора тактовых импульсов и вход CS постоянного запоминающего устройства объединены, первый вход узла вычисления разности подключен к первому входу сумматора, а второй вход - к второму входу сумматора и входу первого преобразователя напряжение - код.
Фиг. 2
Вход
| Самонастраивающаяся система управления | 1980 |
|
SU928300A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Башарин А.В., Новиков В.А., Соколовский Г.Г | |||
| Управление электроприводами | |||
| Л.: Энергоиздат, 1982, с | |||
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
