(5) САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| Самонастраивающаяся система управления | 1980 |
|
SU962852A2 |
| Самонастраивающаяся система управления | 1983 |
|
SU1158974A1 |
| Самонастраивающаяся система управления | 1982 |
|
SU1071997A1 |
| Самонастраивающаяся система управления | 1979 |
|
SU845143A1 |
| Самонастраивающийся регулятор | 1981 |
|
SU960731A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1249478A1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1290255A1 |
| Устройство для управления синхронно перемещающимися механизмами станка | 1981 |
|
SU985760A1 |
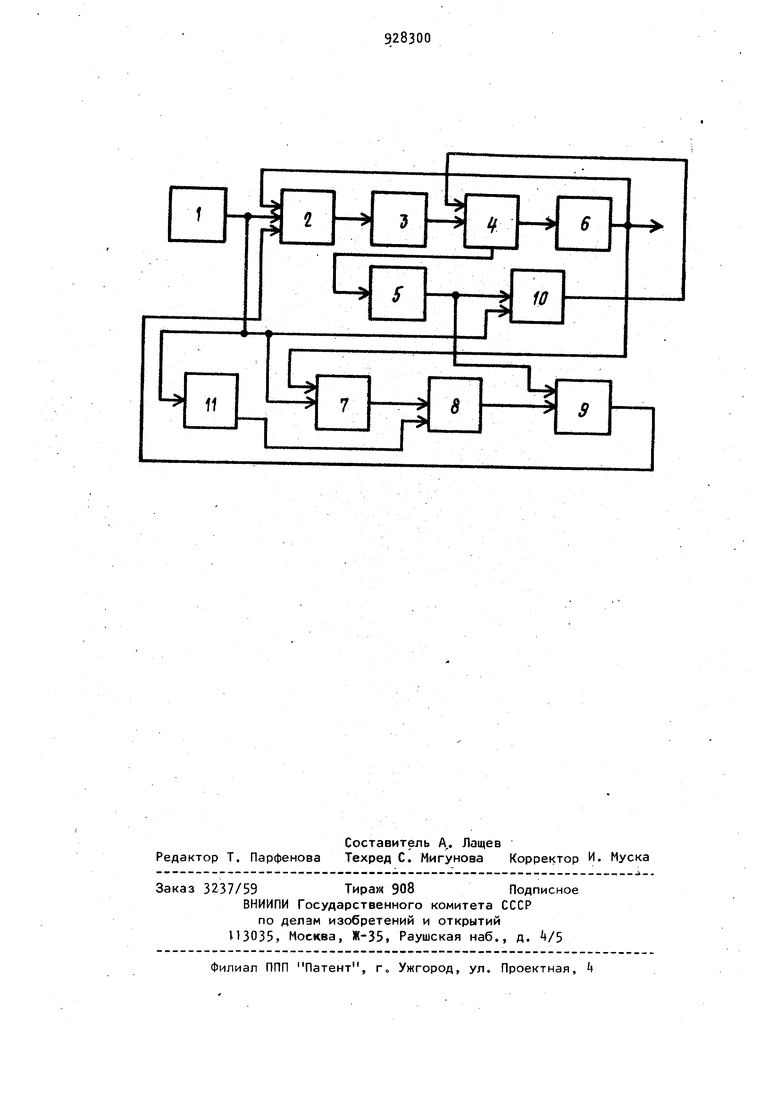
Изобретение относится к автоматическому управлению и может быть использовано для управления электроприводами с широкими пределами изменения коэффициента передачи и момента инерции нагрузки. Такие электроприводы применяются, например, в станкостроении - в системах автоматического упра ления приводами главного дви хения металлорежущих станков, в роботостроении - в системах автоматического упра ления приводами рабочих органов манип ляционных роботов, а также в металлургии - в системах автоматического управления приводами моталок непрерыв ных прокатных станков. Известна самонастраивающаяся система управления, содержащая последовательно соединенные блок задающих си налов, первый сумматор, объект управления, второй сумматор, дифференциатор и усилитель с ограничением, выход которого соединен со вторым входо первого сумматора, а также эталонную модель, вход которой соединен с выходом блока задающих сигналов, а выход со вторым входом второго сумматора 1}, Однако включенный в контур управления дифференциатор приводит к усилению помех, а введение дополнительных полюсов дифференциатора для подавления помех снижает устойчивость или, при сохранении степени устойчивости, быстродействие системы в целом. Наиболее близким решением к изобретению является самонастраивающаяся система управления, содержащая последовательно соединенные блок задающих сигналов, регулятор, усилитель мощности, электродвигатель, датчик частоты вращения, идентификатор состояния, блок масштабных коэффициентов и нелинейный усилитель с ограничением, выход которого соединен со вторым входом регулятора, третий вход регулятора связан со вторым выходом дат.1чика частоты вращения, второй выход электродвигателя через датчик тока возбуждения связан с блоком регулирования тока возбуждения,выход которого свя зан со вторым входом электродвигателя, выход блока задающих сигналов соединен со вторым входом идентификатора состояния,со вторым входом блока регулирова:ния тока возбуждения и через эталонную модель - со вторым входом блока масштабных коэффициентов 2. Недостатком известного устройства является низкое быстродействие при широком регулировании частоты вращения электродвигателя. .Цель изобретения - повышение быстродействия самонастраивающейся систеМы управления двухзонным электроприводом постоянного тока при широком регулировании частоты вращения во второй зоне изменением потока возбуждения, а также при широком изменении момента инерции нагрузки. Поставленная цель достигается тем, что в самонастраивающейся системе второй выход датчика тока возбуждения соединен со вторым входом нелинейного усилителя, выполненного с регулируемым ограничителем. На чертеже представлена блок-схема регулятора. Регулятор содержит блок 1 задающих сигналов, регулятор 2, усилитель мощности 3 электродвигатель с датчиком 5 тока возбуждения и датчиком 6 частоты вращения, идентификатор сос тояния 7 блок 8 мacшtaбныx коэффициентов, нелинейный усилитель 9 с регулируемым ограничением, блок 10 регули рования тока возбуждения.и эталонная модель 11. Самонастраиваюцаяся система управления двухзонным электроприводом постоянного тока работает следующим образом. Блок задающих сигналов 1 вырабатывает командный сигнал, который через регулятор 2 и усилитель мощности 3 подается на якорь электродвигателя i. С помощью датчика частоты вращения 6 сигнал отрицательной обратной связи подается-на второй вход регулятора 2. Кроме того,выход блока задающихсигналов 1 поступает на вход блока регулирования возбуждения 10, выход которого соединен с обмоткой возбуждения электродвигателя. Блок 10 поддерживает номинальное значение тока (потока)
возбуждения в пер.вой зоне регулирования до достижения задающим сигналом уровня, соответствующего началу регущих к ухудшению динамики электропривода на выходе блока 8 появляются сигналы рассогласования, формируемые лирования эгзктропривода во второй зоне, где ток (поток) возбуждения уменьшается, чем достигается дальнейшее увеличение частоты вращения электропривода. Датчик тока возбуждения 5, выход которого подключен ко второму входу блока 10, обеспечивает отрицательную обратную связь по току возбуждения. Одновременно для обеспечения быстродействующей и устойчивой отработки электроприводом задающих сигналов эталонная модель 11, подключенная к выходу блока 1, формирует п-мерный вектор состояния электропривода, соответствующий желаемой динамике с предельно возможным по энергетическим ресурсам быстродействием, а идентификатор 7 на основе информации о задающем сигнале и сигнале датчика частоты вращения 6 вырабатывает п-мерный вектор действительного состояния , электропривода. Затем выходы эталонной модели 11 и идентификатора 7 сравниваются покомпонентно в блоке масштабных коэффициентов 3, выходной сигнал которого представляет собой линейную комбинацию покомпонентных разностей с весовыми коэффициентами, выбираемыми из условия устойчивости. Этот сигнал поступает- на вход нелинейного усилителя 9 с регулируемым ограничением уровня выходного сигнала, являющегося сигналом самонастройки, подаваемого на третий вход регулятора 2 для принудительного согласования реальной динамики электропривода с эталонной динамикой., предписываемой моделью. По второму входу нелинейного усилителя 9, подключенному к выходу датчика тока возбуждения 5, производится регулирование уровня ограничения выходного сигнала усилителя 9 обратно пропорционально изменению тока возбуждения, что является существенным для обеспечения работоспособности электропривода в целом. При работе электропривода в первой зоне регулирования частоты вращения, когда ток возбуждения имеет максимальное ,создавая номинальный поток возбуждения, ограничение сигнала самонастройки с выхода усилителя 9 имеет постоянный минимальный уровень. При этом.при изменении момента инерции или действии иных факторов, приводяусилителем 9 в сигнал самонастройки минимальный постоянный уоовень кото рого выбирается настоойкой блока 9 таким образом, чтобы обеспечить пои нудительное согласование реальной .динамики с эталонной при ее ухудшени не менее чем в 5-10 раз, что соотве ствует, например, изменению момента инерции в 5-10 раз. При регулировании частоты вращения электропривода во второй зоне уменьшением потока возбуждения, которое в современных электроприводах постоянного тока достигает восьмидесятикратного, электромеханическая постоянная времени увеличивается в Ьфраз, где k0 - коэффициент ослабления потока по сравнению с номинал ным k ф с иомТаким образом, в глубоко регулиру емом по возбуждению электроприводе электромеханическая постоянная времени увеличивается в верхней части диапазона до 50-100 раз, что приводит к соответствующему ухудшению динамики, которое уже не может быть скомпенсировано сигналом самонастрой ки при минимальном уровне ограничения. Поэтому в предлагаемом устройстве уровень выходного сигнала усилителя 9. автоматически возрастает с уменьшением тока (потока) возбуждения, что обеспечивает работоспособность электропривода при регулировании частоты вращения во второй зоне. При этом, если исключить связь выхода датчика тока возбуждения со вторым регулирующим входом нелинейного усилителя 9 и настроить уровень сигнала выхода блока 9 на постоянное максимальное значение, обеспечивающее самонастройку динамики при максимальном ослаблении потока возбужде ния, тогда при возрастании потока возбуждения такой уровень сигнала самонастройки окажется чрезмерным и приведет к нарушению работоспособности электропривода, особенно при работе его в первой зоне регулирования и стабилизации частоты вращения с максимальным потоком возбуждения. Таким образом, вновь введенная связь между выходом датчика и вторым входом нелинейного усилителя с регулируемым ограничением обеспечивает повышение быстродействия двухзонного электропривода, что приводит к расширению области его применения в условиях глубокого регулирования потока возбуждения и широкого изменения момента инерции, а также при действии других дестабилизирующих динамику электропривода факторов. Формула изобретения Самонастраивающаяся система управления, содержащая последовательно соединенные блок задающих сигналов, регулятор, усилитель мощности, элект- родвигатель, датчик частоты вращения, идентификатор состояния, блок масштабных коэффициентов и нелинейный усилитель с ограничением, выход которого соединен со вторым входом регулятора, третий вход регулятора связан со вторым выходом датчика частоты вращения, второй выход электродвигателя через датчик тока возбуждения связан с блоком регулирования тока возбуждения, выход которого связансо вторым входом электродвигателя, выход блока задающих сигналов соединен со вторым входом идентификатора состояния, со вторым входом блока регулирования тока возбуждения и через эталонную модель - со вторым входом блока масштабных коэффициентов, отличающаяся тем, что, с целью повышения быстродействия самонастраивающейся системы, вторбй выход датчика тока возбуждения соединен со вторым входом нелинейного усилителя, выполненного с регулируемым ограничением. Источники информации, принятые во внимание при экспертизе 1.Громыко В.Д. и др. Самонастраивающиеся системы с моделью. М,, Энергия, 197, с. 21. 2.Фишбейн В.Г, Расчет систем подчиненного регулирования вентильного электропривода постоянного тока, М., Энергия, 1972, с. 77 (прототип).
