R;(XK) --J(XK- X;)4 + (Yfc- Y;)2 + (ZK- Z.)e (i - ГГЗ)
А()- матрица чистых проиэ-Элементы этой матрицы определяводных измеряемых пара- 55 ются на k-м шаге процесса по форму- метро в.ле:
x - x
R,3Ј
YK - Yi
ZJL- zi
flj
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь координат | 1988 |
|
SU1513445A1 |
| Преобразователь координат | 1990 |
|
SU1742816A2 |
| Устройство для преобразования координат | 1989 |
|
SU1681313A1 |
| Преобразователь координат | 1990 |
|
SU1784976A1 |
| Устройство для преобразования координат | 1990 |
|
SU1800455A1 |
| Устройство для формирования изображения | 1987 |
|
SU1474633A1 |
| Устройство для вычисления координат | 1989 |
|
SU1635178A1 |
| Устройство для вычисления координат отображаемых объектов | 1990 |
|
SU1751805A1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ЦИФРОВОГО СИГНАЛА ИЗОБРАЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2287909C2 |
| Способ и устройство определения угловой ориентации летательных аппаратов | 2020 |
|
RU2740606C1 |

Изобретение относится к технике обработки измерительной информации и может быть использовано в геодезических трилатерационных системах для преобразования, пространственных координат и их производных по времени. Целью изобретения является расширение класса решаемых задач. Устройство содержит арифметический блок 7, блок 8 управления, регистр 9 ошибки, ключи 10.1 и 10.2, блок 11 сравнения, регистры координат 12.1-12.3, мультиплексор 13 с соответствукядомн связями. Преобразователь позволяет осуществлять определение пространственного местоположения (X, Y, Z) точки пересечения трех сфер, заданных измеренными коэ R) ординатами расстояния (R, 2, « относительно точек с известными прямоугольными координатами (первой - с координатами Х, Y4, Zjt второй - с координатами Х, Y, Ј2, третьей - с координатами Х, Y$, Z) и их производных по времени (X, Y, Z) по измерениям скоростей расстояний R,, RЈ RЈ. 1 з.п. ф-яы, 3 ил. (Л
Хк - X4 Ж
Ib.- Ii к,(Гк)
Хк
ГЛ
Yj; - Y3
Г,(1ЈГ
Поскольку измеренные величины R|(,3) связаны с искомыми параметрами X, Y, Z линейной зависимостью
Li-Xi С
; Y
Z Zi -R- Z
(i - 1,3),
то процесс преобразования производных параметров может быть осуществлен параллельно с преобразованием координат по формуле:
Преобразователь функционирует следующим образом.
Работа преобразователя начинается с подачи на входы следующих значений: на вход 1 поданы значения R, R R
ki
на вход 2 - значения Xj , Yj
1
1,2,3), на вход 3 - значения Z0, на вход 4 - значения R,,
1 3
Z; (i У
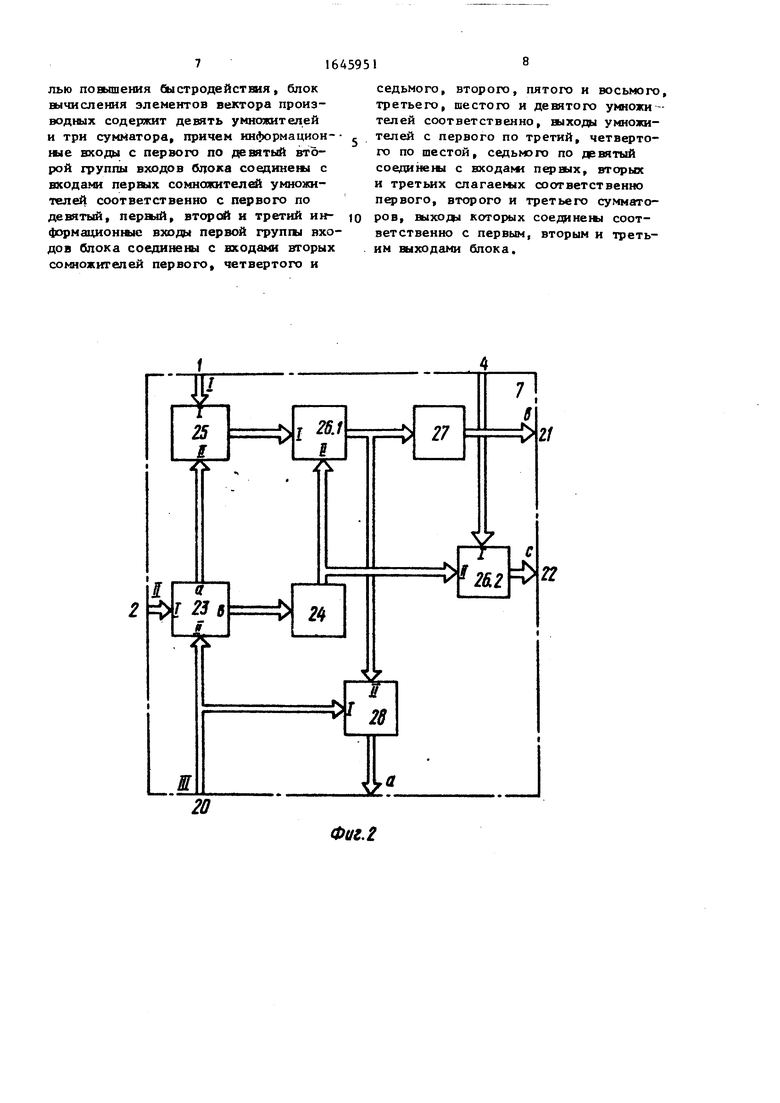
RJ, ЧСобственно преобразование координат и производных на каждом шаге осуществляется в арифметическом блоке 7.
Управление итерационным процессом выполнения нескольких шагов преобразвания осуществляется блоком 8 управления. Данный блок обеспечивает ввод начальных данных, управление мультиплексорами 12.1 и 12.2, осуществляющими коммутацию информационных потоков, буферизацию промежуточных резул татов в регистрах 12.1, 12.2, 12.3 и контроль окончания вычисления на онове допустимой погрешности, записанной в регистре ошибок 9.
Преобразование координат в арифметическом блоке 7 состоит из нескольких действий. Блок 23 расстояний предназначен для расчета наклонных дальностей R;(XK) и матрицы производ
«
42
1
а2( а22 а25
11|
32
- ZJ
)
ных А(ХЖ) по преобразованным значения м координат.
Блок 24 обращения используется для обращения матрицы.
Формирователь 25 навязки предназначен для получения величины рассогласования между измеренными и вычисленными величинами дальностей.
Блоки 26.1 и 26.2 производных служит для одновременного умножения обращенной матрицы на соответствую- дее входные переменные (координаты и производные соответственно).
В момент окончания вычислений на выходах 22 группы формируются значения Х, Y Z, на выходах 21 группы значения Xh, Y, г„ (где п - число выполненных операций).
35
40
45
-5055
Формула изобретения
Фиг. 2
седьмого, второго, пятого и восьмого, третьего, шестого и девятого умножителей соответственно, выходы умножителей с первого по третий, четвертого по шестой, седьмого по девятый соединены с входами первых, вторых и третьих слагаемых соответственно первого, второго и третьего сумматоров, выхода которых соединены соответственно с первым, вторым и третьим выходами блока.
фиг.З
| Преобразователь координат | 1988 |
|
SU1513445A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
