Изобретение относится к обработке измерительной информации и может быть использовано в геодезических трилатерационных системах для преобразования пространственных координат.
Цель изобретения - расширение класса решаемых задач за счет возможности определения пространственного местоположения точки пересечения сферических поверхностей положения в прямоугольной системе координат.
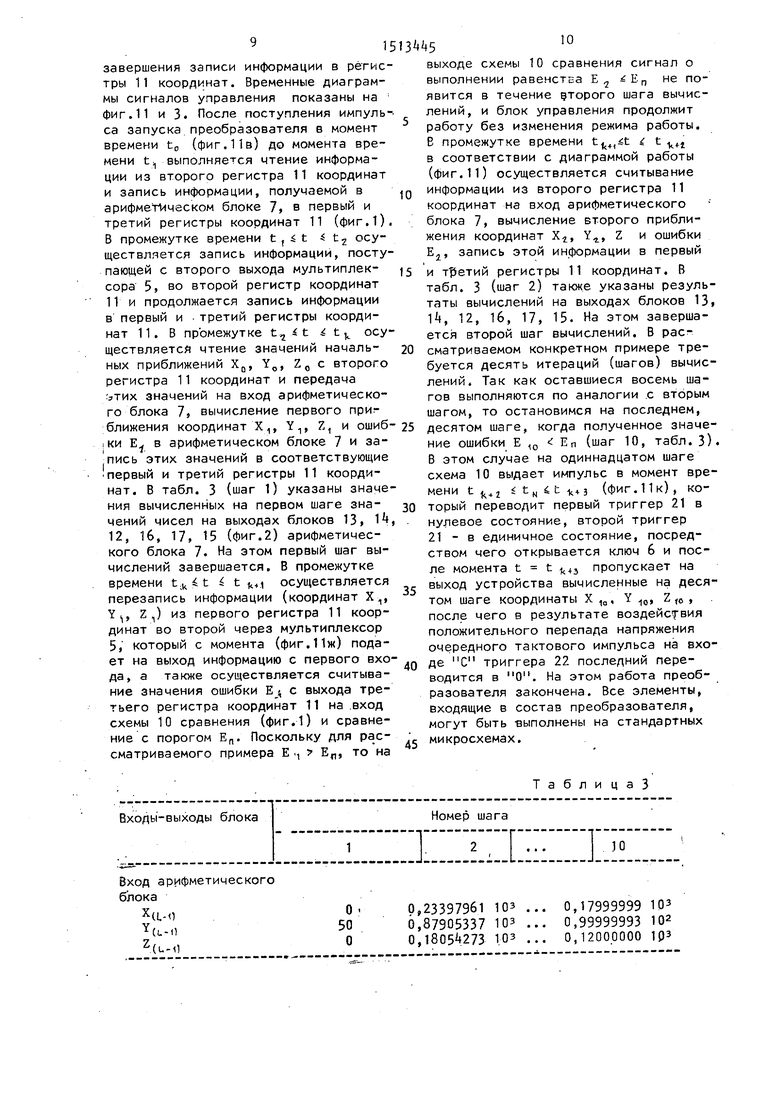
На фиг.1 представлена блок-схема преобразователя координат; на фиг.2 - схема арифметического блока; на фиг.З - вариант блока управления; на фиг. - блок определения расстояний
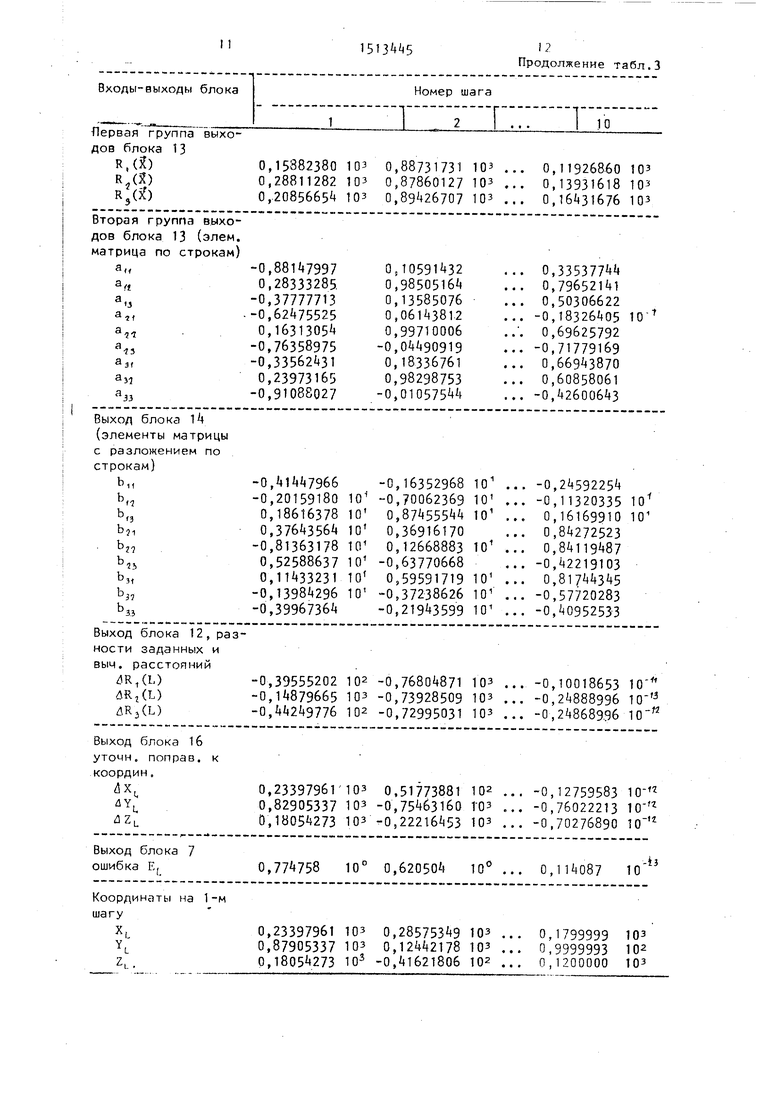
и производных; на фиг.5-7 - соответственно блок обращения, формирователь невязок, блок формирования произведений; на фиг.8-10 - блок определения ошибки, формирователь производных и блок дополнений соответственно; на фиг.11 - временные диаграммы работы блока управления.
На чертежах обозначены: группы информационных входов 1-3, выход k преобразователя, мультиплексор 5, ключ 6, арифметический блок 7, блок 8 управления, блок Э памяти, схема 10 сравнения, регистры 11 координат. Арифметический блок содержит формирователь 12 невязок, блок 13 определе-.
сл
со
4; 4 СЛ
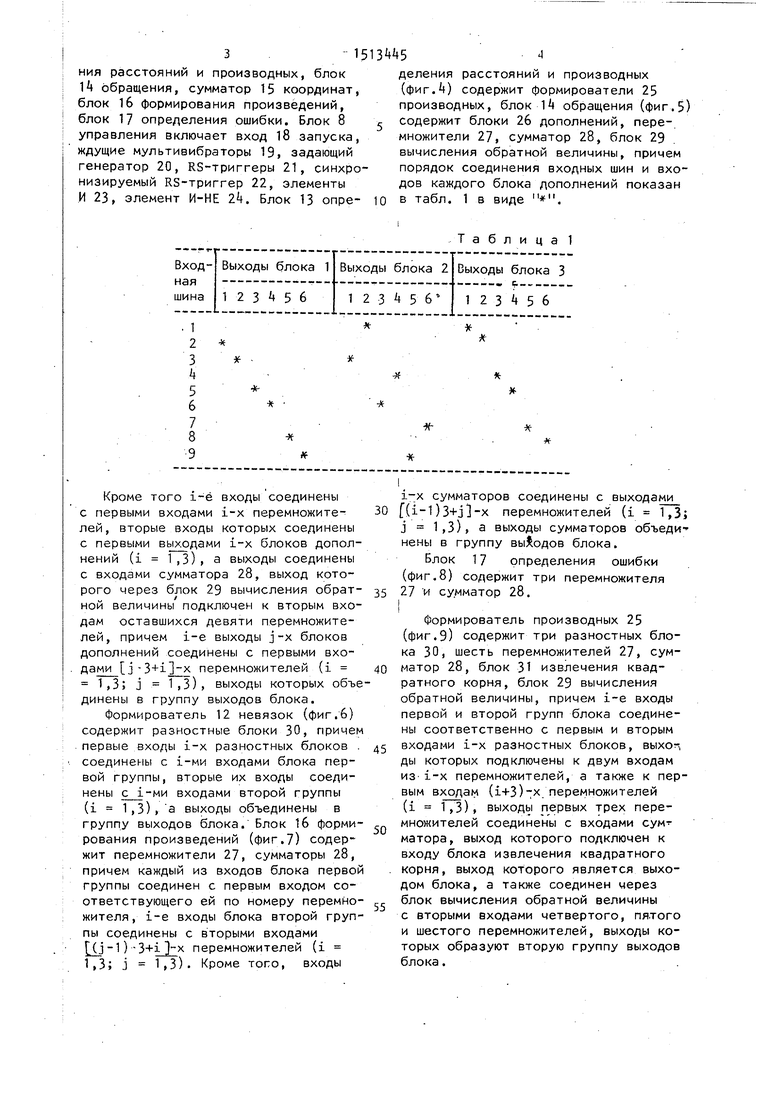
ния расстояний и производных, блок 1 обращения, сумматор 15 координат, блок 16 формирования произведений, блок 17 определения ошибки. Блок 8 управления включает вход 18 запуска, ждущие мультивибраторы 19, задающий генератор 20, RS-триггеры 21, синхронизируемый RS-триггер 22, элементы И 23, элемент И-НЕ 2k. Блок 13 определения расстояний и производных (фиг.) содержит формирователи 25 производных, блок И обращения (фиг.5) содержит блоки 26 дополнений, перемножители 27, сумматор 28, блок 29 вычисления обратной величины, причем порядок соединения входных шин и входов каждого блока дополнений показан в табл. 1 в виде .
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь координат | 1990 |
|
SU1742816A2 |
| Преобразователь координат | 1988 |
|
SU1645951A2 |
| Низкоскоростной дельта-модулятор | 1984 |
|
SU1203706A1 |
| Устройство для автоподстройки частоты | 1988 |
|
SU1653159A1 |
| Двухкоординатная система программного управления | 1980 |
|
SU938264A1 |
| Устройство для решения линейных систем алгебраических уравнений | 1985 |
|
SU1325464A1 |
| Устройство для адаптивного сжатия информации | 1989 |
|
SU1608728A1 |
| Адаптивный цифровой корректор | 1982 |
|
SU1083379A1 |
| Вычислительное устройство для решения задачи выправки железнодорожного пути | 1977 |
|
SU708355A1 |
| Устройство для исправления ошибок | 1984 |
|
SU1216832A1 |
Изобретение относится к обработке измерительной информации и может быть использовано в геодезических трилатерационных системах для преобразования пространственных координат. Цель изобретения - расширение класса решаемых задач за счет возможности определения пространственного местоположения точки пересечения сферических поверхностей положения в прямоугольной системе координат. Поставленная цель достигается тем, что в известный цифровой преобразователь координат, содержащий блок управления, блок постоянной памяти, сумматоры координат, задающий генератор, регистр координат, введены арифметический блок, схема сравнения, ключ, три регистра координат, мультиплексор и новая организация связей между элементами устройства, за счет чего появляется возможность определять пространственные положения точки по трем расстояниям до нее относительно трех опорных точек с пространственными прямоугольными координатами. 5 з.п. ф-лы, 11 ил.
Кроме того i-e входы соединены с первыми входами i-x перемножите- лей, вторые входы которых соединены с первыми выходами i-x блоков дополнений (i 1,3), а выходы соединены с входами сумматора 28, выход которого через блок 29 вычисления обрат- ной величины подключен к вторым входам оставшихся девяти перемножителей, причем i-e выходы j-х блоков дополнений соединены с первыми вхо- дами j-3+i -x перемножителей (i 1,3; j 1,3), выходы которых объединены в группу выходов блока.
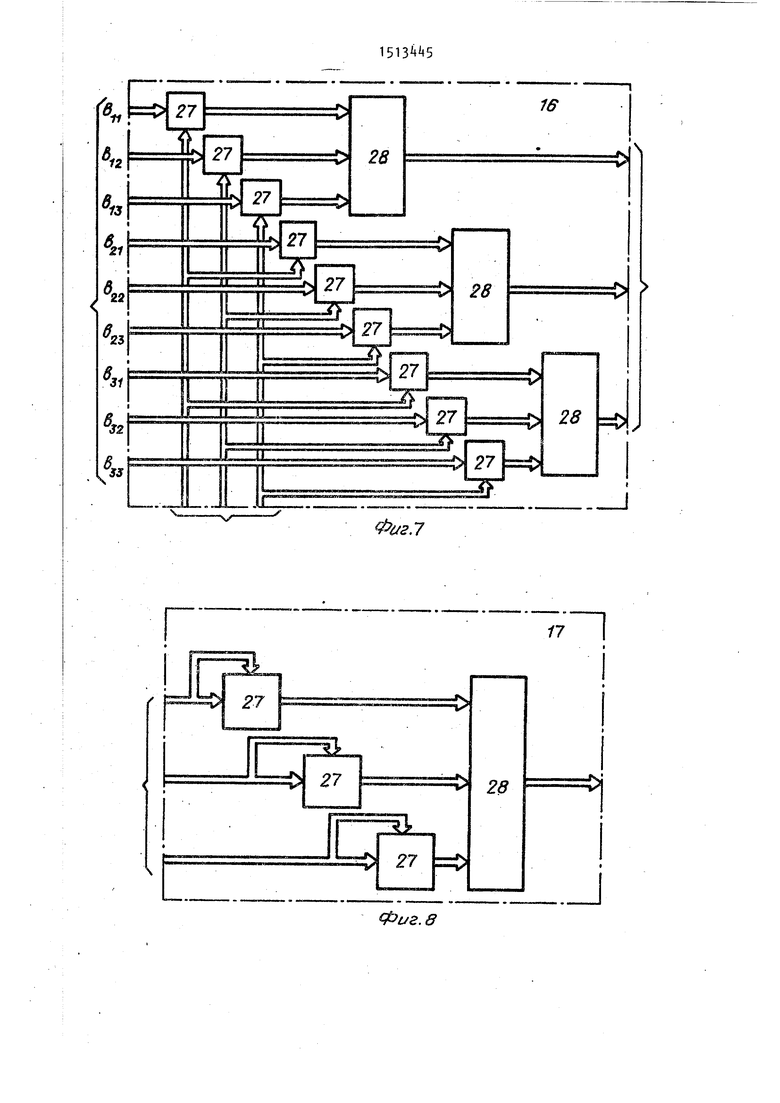
Формирователь 12 невязок (фиг.6) содержит разностные блоки 30, причем .первые входы i-x разностных блоков . соединены с i-ми входами блока первой группы, вторые их входы соединены с i-ми входами второй группы (i 1,3), а выходы объединены в группу выходов блока. Блок 16 форми- рования произведений (фиг.7) содер- жит перемножители 27, сумматоры 28, причем каждый из входов блока первой группы соединен с первым входом соответствующего ей по номеру перемНо- жителя, i-e входы блока второй группы соединены с вторыми входами (j-1) перемножителей (i 1,3; j 1,3). Кроме того, входы
Таблица 1
ft
х05 0
5
5
1-х сумматоров соединены с выходами f()3+jl-x перемножителей (i 1,3; j 1,3), а выходы сумматоров объединены в группу выводов блока.
Блок 17 определения ошибки (фиг.8) содержит три перемножителя 27 И сумматор 28.
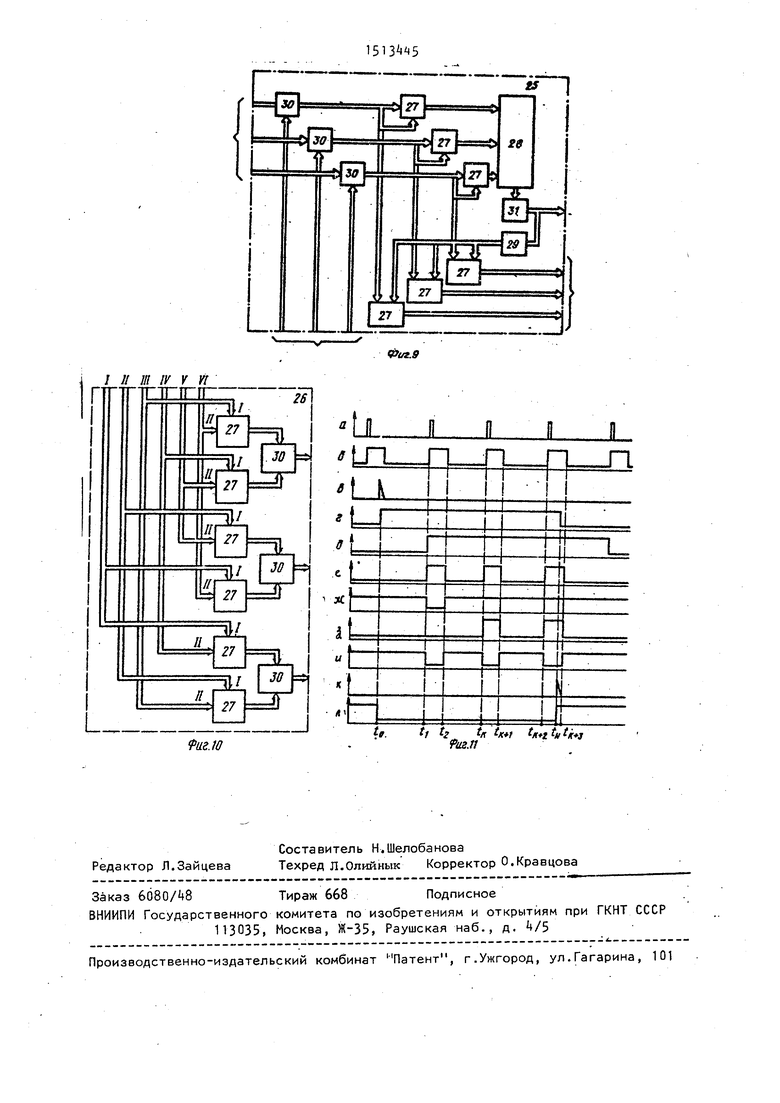
Формирователь производных 25 (фиг.9) содержит три разностных блока 30, шесть перемножителей 27, сумматор 28, блок 31 извлечения квадратного корня, блок 29 вычисления обратной величины, причем i-e входы первой и второй групп блока соединены соответственно с первым и вторым входами i-x разностных блоков, выхоп ды которых подключены к двум входам из-i-x перемножителей, а также к первым входам (i+3)-x перемножителей (i ГТЗ), выходь первых трех перемножителей соединены с входами сум- матора, выход которого подключен к входу блока извлечения квадратного корня, выход которого является выходом блока, а также соединен через блок вычисления обратной величины с вторыми входами четвертого, пятого и шестого перемножителей, выходы которых образуют вторую группу выходов блока.
5ISlS iS6
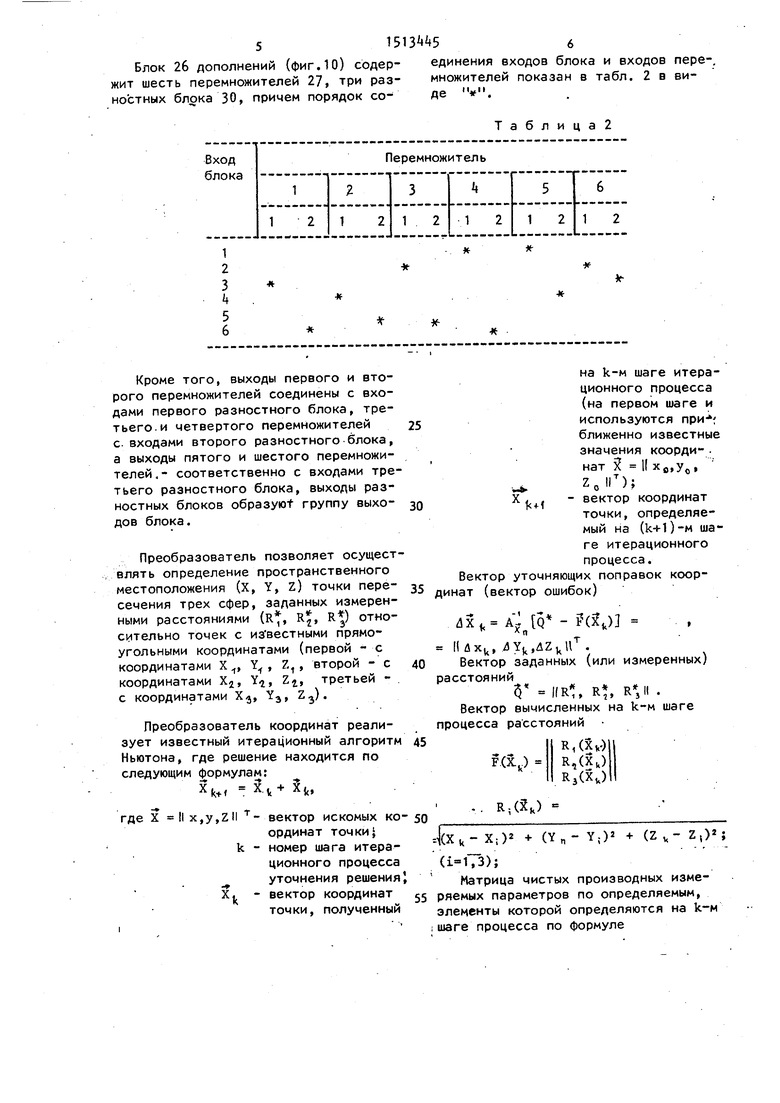
Блок 26 дополнений (фиг.10) содер- единения входов блока и входов пережит шесть перемножителей 27, три раз- множителей показан в табл. 2 в ви- но стных блока 30, причем порядок со- де .
Таблица2
Кроме того, выходы первого и второго перемножителей соединены с входами первого разностного блока, третьего, и четвертого перемножителей с. входами второго разностного блока, а выходы пятого и шестого перемножителей,- соответственно с входами третьего разностного блока, выходы разностных блоков o6pa3yrot группу выходов блока.
Преобразователь позволяет осуществлять определение пространственного местоположения (Х, Y, Z) точки пересечения трех сфер, заданных измеренными расстояниями (R, R, R) относительно точек с из вестными прямоугольными координатами (первой - с координатами X , Y, Z,, второй - с координатами X-j, Y, Z, третьей - с координатами Х, Y, Z).
Преобразователь координат реализует известный итерационный алгоритм Ньютона, где решение находится по следующим формулам:
X
k+«
X.vf 5t,
X
x,y,ZII вектор искомых координат точкиJ k - номер шага итерационного процесса уточнения решения Xj - вектор координат точки, полученный
X
на k-M шаге итерационного процесса (на первом шаге и используются при- ближенно известные значения коорди- . нат К ХО,УО,
Zoii );
1 + i
вектор координат точки, определяемый на (k+1)-м шаге итерационного процесса.
Вектор уточняющих поправок коор- динат (вектор ошибок)
0
ЗХ AjJjQ - F(i)
II ДХц, 4Y, .
Вектор заданных (или измеренных) расстояний
Г
KR,
R:. R
г J
Вектор вычисленных на k-м шаге процесса расстояний
45
50
-.(Хь- Х:)2 + (Yn- Y;)2 + (Z V- Z,)z;
();
Матрица чистых производных изме- 55 ряемых параметров по определяемым, элементы которой определяются на k-м i шаге процесса по формуле
15
20
25
Z 220; Z 190.
30
Итерационный процесс завершается на L-M шаге в том случае, если норма вектора ошибок (уточняющих поправок) ДХ,, не превышает заданного порога точности вычислений Е.
Пример. Пусть истинные координаты точки равны: X 180, Y 100, Z 120,
При рассмотрении работы преобразователя- двоичный эквивалент чисел не используется, так как при этом теряется наглядность. Пространствен- ные координаты опорных точек, относительно которых определено расстояние до точки, координаты которой требуется найти, заданы следующим образом:
X, НО; Y, 5; Z 160;
Y 180 Y, 3,
Хз 70; Yj 0;
Соответствующие расстояния между точками (с точностью до восьмой значащей цифры) R 0,11926860-103; R 0,139.31618-103 , R 0,16431676 X X 103, Йачальные приближения искомых координат X, Y, Z и порогового значе-35 ния ошибки вычислений заданы так:
Xfl о; Y 5с;. Zo о; Е.„ 10- .
Работа преобразователя начинается с того, что по входам 1 поступают значения величин R, R, R по вхо- дам 2 - значения величин X;YjZ (i 1,3) I а по входам 3 значения величин Xj,, Y, Z 0.
Арифметический блок 7 является лом, в котором производится собственно преобразование координат. Блок 13 определения расстояний ,.и производных предназначен для расчета расстояний R;(X) (i 1,3). и матрицы производных А(Ху) по преобразованным значениям координат. Блок 1 обращения предназначен для обращения матрицы. Формирователь 12 невязок предйазначен для получения величины рассогласования между измеренными и вычисленными величинами расстояний. Блок 16 формирования произведений предназначен для формирования произведения матри
40
50
11 11 о
21 1 3,
31 эг 53
5
0
5
0
5
5
0
0
цы на вектор. Блок 8 управления предназначен для синхронизации работы - преобразователя.
Основная работа устройства осуществляется с помощью блока 8 управления и начинается подачей сигнала на вход 18 (фиг.З) внешнего запуска. При этом переводится в единичное состояние первый триггер 21, переводится в нулевое состояние второй триггер 21 (фиг.З) и закрывается ключ 6, запрещая вывод информации . из второго буферного регистра 11 координат (фиг.1) во время вычислений. Перевод первого триггера 21 в единичное состояние обеспечивает появление логической 1 на информационном входе синхронизируемого триггера 22 (фиг.З). Перевод синхронизируемого триггера 22 в единичное состояние происходит в момент появления на его счетном входе тактового импульса от задающего генератора 20 тактовых импульсов. В результате с выхода синхронизируемого триггера 22 логическая 1 поступает на первый вход первого элемента И 23, обеспечивая прохождение синхроимпульсов, поступающих на второй его вход от первого ждущего мультивибратора 19. Кроме того, положительный перепад напряжения, появившийся на выходе триггера 22, соединенного с входом ждущего мультивибратора 19i вызывает появление синхроимпульса на выходе этого мультивибратора. С выхода второго мультивибратора 19 и первого элемента И 23 синхроимпульсы поступают,на вход второго элемента И 23, выход которого соединен с управляющими входами первого и третьего регистров 11 координат. Синхроимпульсы с выхода первого элемента И 23 через элемент И-НЕ 2k, где происхо,-; дит инвертирование сигналов, поступа.- ют на управляющий вход второго регистра 11 координат. Период следова+ния синхроимпульсов выбирается из условия полного завершения одного шага вычислений, длительность - из условия
завершения записи информации в рёгис тры 11 координат. Временные диаграммы сигналов управления показаны на фиг.11 и 3. После поступления импуль са запуска преобразователя в момент времени to (фиг.11 в) до момента времени ti, выполняется чтение информации из второго регистра 11 координат и запись информации, получаемой в арифмет 1ческом блоке 7, в первый и третий регистры координат 11 (фиг.1) В промежутке времени t , i t tj осуществляется запись информации, посту пающей с второго выхода мультиплексора 5, во второй регистр координат 11 и продолжается запись информации в первый и третий регистры координат 11. В промежутке t осу ществляется чтение значений начальных приближений XQ, Y, Z с второго регистра 11 координат и передача ;этих значений на вход арифметического блока 7) вычисление первого ближения координат Х, Y, Z, и ошиб |КИ EW в арифметическом блоке 7 и за- пись этих значений в соответствующие Первый и третий регистры 11 координат, В табл. 3 (шаг 1) указаны значения вычисленных на первом шаге значений чисел на выходах блоков 13, I 12, 16, 17, 15 (фиг.2) арифметического блока 7. На этом первый шаг вычислений завершается. В промежутке времени t,kit t осуществляется перезапись информации (координат Х, Y, Z ,) из первого регистра 11 координат во второй через мультиплексор 5, который с момента (фиг.Пж) подает на выход информацию с первого входа, а также осуществляется считывание значения ошибки Ej с выхода третьего регистра координат 11 на .вход схемы 10 сравнения (фиг.1) и сравнение с порогом Ef,. Поскольку для сматриваемого примера Е ., Е, то на
О .0,23397961 103
500,87905337 Юз
О0, 103
10
15
20
25
30
35
40
45
выходе схемы 10 сравнения сигнал о выполнении равенства Е, ЕП не появится в течение второго шага вычислений, и блок управления продолжит работу без изменения режима работы. В промежутке времени t j в соответствии с диаграммой работы (фиг.11) осуществляется считывание информации из второго регистра 11 координат на вход арифметического блока 7, вычисление второго приближения координат Xj, Y, Z и ошибки Ej, запись этой информации в первый
и регистры 11 координат. В табл. 3 (шаг 2) также указаны результаты вычислений на выходах блоков 13, 1, 12, 16, 17, 15. На этом завершается второй шаг вычислений. В рас сматриваемом конкретном примере требуется десять итераций (шагов) вычислений. Так как оставшиеся восемь шагов выполняются по аналогии .с вторым шагом, то остановимся на последнем, десятом шаге, когда полученное значение ошибки Е 0 « Е п (шаг 10, табл. 3). В этом случае на одиннадцатом шаге схема 10 выдает импульс в момент времени it 6ti443 (фиг. 11 к), который переводит первый триггер 21 в нулевое состояние, второй триггер 21 - в единичное состояние, посредством чего открывается ключ 6 и после момента t t +3 пропускает на выход устройства вычисленные на десятом шаге координаты X ,„, Y д, Z с , после чего в результате воздействия положительного перепада напряжения очередного тактового импульса на входе С триггера 22 последний переводится в О Ч На этом работа преобразователя закончена. Все элементы, входящие в состав преобразователя, могут быть выполнены на стандартных микросхемах.
ТаблицаЗ
0,17999999 Ю 0,99999993 102 0,12000000 1рз
Формула изобретения
пространственного местоположения точ- ю входов блока произведений, вторая
ки пересечения сферических поверхностей положения в прямоугольной системе координат, в него введены арифметический блок, схема сравнения, ключ, три регистра координат и мультиплек- 15 сор, причем выходы блока управления соединены с входами разрешения записи первого, второго и третьего регистров координат, с управляющим входом мультиплексора и первым входом ключа, 20 первая и вторая группы входов арифметического блока соединены соответственно с первой и второй группами информационных входов преобразоватегруппа входов которого подключена выходу блока обращения, а группа в ходов соединена непосредственно с второй группой входов сумматора ко ординат и через блок определения ошибки - с второй -группой выходов блока, первая группа выходов котор го является выходом сумматора коор динат.
формационными выходами второго регистра координат и вторым входом ключа, выход которого является выходом преобразователя , первая и вторая группы
выходов арифметического блока подклю- зо производных подключены к первой груп
чены соответственно к информационным входам первого и третьего регистров координат, выходы которых соединены с первым информационным входом мультиплексора и первой группой входов схемы сравнения соответственно, вторая группа входов которой подключена к выходу блока памяти, третья группа информационных входов преобразователя соединена с вторым информационным входом мультиплексора, выход которого подключен к информационному входу второго регистра координат, выхрд схемы сравнения соединен с входом смены режима блока управления.
формирователя невязок, вторая группа „ маторов, выходы которых являются
входов блока соединена с первой группой входов блока определения расстояний и производных, а третья группа входов блока - с первым входом суммагрупп-ой выходов блока.
тора координат и второй группой входов блока определения расстояний и производных, первая и вторая группы выходов которого подключены соответственно к первому входу блоКа обращения и второй группе входов формирователя невязок, выход последнего из которых соединен с первой группой
5 0
5
группа входов которого подключена к выходу блока обращения, а группа выходов соединена непосредственно с второй группой входов сумматора координат и через блок определения ошибки - с второй -группой выходов блока, первая группа выходов которого является выходом сумматора координат.
5
0
Q
5
пе выходов блока, а вторые выходы образуют вторую группу выходов блока.
+. Преобразователь по п.2, о т - лича ющийся тем, что формирователь невязок содержит три разностных блока, причем первые и вто-. рые входы i-x разностных блоков соединены с i-ми входами соответственно первой и второй групп входов блока (1 1,3), а выходы являются группой выходов блока.
множителя и сумматор, выход которого первые и входы i-x перемножи- является выходом блока, а входы сое- телей (i 1,3) соединены с i-ми вхо- динены с выходами перемножителей, Дами группы входов блока, .
иг.1
fiis.3
iis.2
и.г.
0-л 0-12 /j 0.1 OLz2 й.23 л 0-зг JS
. /j /г /у
г. 5
7
3
f J 22 21% J2 /Л
ъо
4 J
Фиг. 6
Фаг.7
Фиг. 8
I П т IV Y Yl
ftl2.W
±.
fff.ft ( УГ ffft H
faz.n
| Станок для нанесения делений | 1941 |
|
SU72653A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Авторское свидетельство СССР , кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
