Изобретение относится к машиностроению и может быть использовано в исполнительных органах промышленных роботов и манипуляторов.
Целью изобретения является расшмре- ние технологических возможностей за счет разделения движений схвата и посинения точности его ориентации.
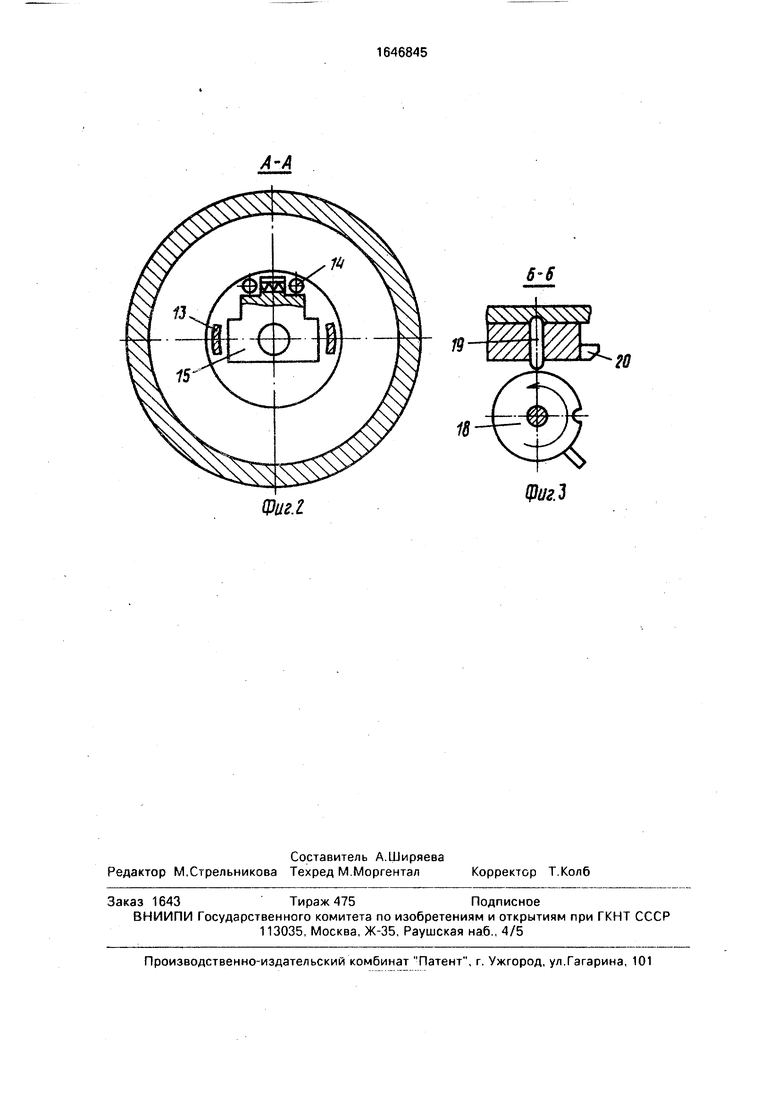
На фиг.1 представлен исполнительный орган манипулятора; на фиг.2 - разрез А - А на фиг,1; на фиг.З - разрез Б - Б на фиг.1,
Исполнительный орган манипулятора состоит из основного 1, промежуточного 2 и дополнительного 3 корпусов, схвата 4, за- крепленного на фланце дополнительного корпуса 3, и привода перемещения схвата.
Привод перемещения схвага состоит из двигателя 5, например электродвигателя, эпициклической и конической зубчатых пе- редач. Причем поводок 6 эпициклической передачи связан с выходным валом двигателя 5 и несет сателлит 7, входящий в зацепление с зубчатыми колесами 8 и 9. Зубчатое колесо 8 удерживается от вращения фикса- тором 10. Зубчатые колеса 8 и 9 незначительно различаются по числу зубьев (например, на 1 зуб). Зубчатое колесо 9 связано с валом 11 ведущего колеса 12 конической передачи посредством невозвратной муфты, состоящей из выступов 13, выполненных на зубчатом колесе 9, и образованной подпружиненными роликами 14, расточкой основного корпуса 1 и ступицей 15 вала 11 ведущего колеса 12 конической передачи.
На нижнем конце вала 11 закреплено ведущее .колесо 12 конической передачи, расположенное в промежуточном корпусе 2 и входящее в зацепление с ведомым коле- сом 16, которое жестко связано с дополнительным корпусом 3, установленным на подшипниках на ведомом валу 17, неподвижно закрепленном в промежуточном корпусе 2.
К боковой поверхности дополнительного корпуса 3 крепится диск 18 с лункой В промежуточном корпусе 2 между диском 18 и основным корпусом 1 находится фиксатор 19. На промежуточном корпусе 2 предус- мотрен упор 20, а на основном корпусе 1 - упор 21. Фиксатор 10 взаимодействует с концевым выключателем 22, управляющим двигателем 5.
Исполнительный орган манипулятора работает следующим образом,
Вращение от двигателя 5, например электродвигателя, передается поводку 6. При обкатывании сателлита 7 по венцу зубчатого колеса 8, которое удерживается от
вращения фиксатором 10, зубчатое колесо 9 получает медленное вращение. Через выступы (поводки) 13, ролики 14 и ступицу 15 невозвратной муфты приводится во вращение вал 11с ведущим колесом 12. Промежуточный корпус 2 удерживается от вращения фиксатором 19, а ведомое колесо 16 вместе с дополнительным корпусом 3 поворачивается вокруг ведомого вала 17. В тот момент, когда дополнительный корпус 3 доходит до упора 20, лунка диска 18 доходит до фиксатора 19. Вращение дополнительного корпуса 3 прекращается, а промежуточный корпус 2, освобожденный от фиксатора 19, начинает вращаться вместе с ведущим колесом 12 вокруг вертикальной оси до соприкосновения с упором 21 на основном корпусе 1.
При прекращении вращения промежуточного корпуса 2, ведущего колеса 12 и вала 11 срабатывает невозвратная муфта, т.е. ролики 14 заклиниваются выступами 13 в отверстии основного корпуса 1. Зубчатое колесо 9 останавливается. Усилие, передаваемое сателлитом 7 на зубчатое колесо 8, возрастает, преодолевая усилие пружины фиксатора 10, который нажимает на выключатель 22 и останавливает вращение двигателя 5.
Формула изобретения Исполнительный орган манипулятора, содержащий основной и дополнительный корпуса, схват, привод перемещения схвата, имеющий двигатель и коническую зубчатую передачу, ведущее колесо которой связано с двигателем, а ведомое размещено на ведомом валу этой передачи, шарнирно установленном в дополнительном корпусе, а также фиксаторы, отличающийся тем, что, с целью расширения технологических возможностей за счет разделения движений схвата и повышения точности его ориентации, он снабжен промежуточным корпусом, жестко закрепленным на ведомом валу с возможностью его поочередного соединения с основым и дополнительным корпусами посредством фиксатора, а связь двигателя с ведущим колесом конической передачи выполнена в виде эпициклической передачи, поводок которой связан с двигателем, а ее сателлит установлен с возможностью одновременного взаимодействия с двумя ее зубчатыми колесами, одно из которых связано с основным корпусом посредством фиксатора, а другое - с ведущим колесом конической передачи посредством дополнительно введенной муфты, причем ведомое колесо конической передачи жестко связано с дополнительным корпусом.
Шг.1
6-6
ЩигЗ
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1357220A1 |
| Манипулятор | 1983 |
|
SU1094734A1 |
| Шарнир манипулятора | 1982 |
|
SU1057274A1 |
| Исполнительный орган манипулятора | 1986 |
|
SU1342720A1 |
| Рука манипулятора | 1983 |
|
SU1117204A1 |
| Промышленный робот | 1985 |
|
SU1310198A1 |
| Трансмиссия гусеничной машины | 1988 |
|
SU1527072A1 |
| Манипулятор | 1988 |
|
SU1627400A1 |
| Упругая муфта высокой податливости | 1991 |
|
SU1820063A1 |
| Манипулятор агрегатного типа | 1985 |
|
SU1293014A1 |
Изобоотение относится к машиностроению и может быть использовано в исполнительных органах промышленных роботов м манипуляторов. Целью изобретения является расширение технологических возможностей за счет разделения движений схватэ и 16 повышений точности его ориентации. Исполнительный орган манипулятора содержит основной 1. промежуточный 2 м дополнительный 3 корпуса, схват 4 и.привод его перемещения. Привод перемещения состоит из эпициклической передачи, поводок 6 которой связан с выходным валом двигателя 5. Два зубчатых колеса 8 и 9 устанозле- ны с возможностью мх соединения соответственно с основным корпусом 1 посредством фиксатора 10 и с ведущим колесом 12 конической передачи посредством невозвратной муфты. Причем ведомое чоле- со конической передачи жестко связано с дополнительным корпусом 3, а промежуточных корпус 2 имеет возможность удерживаться от вращения фиксатором 19. 3 ил. Ю
| Исполнительный орган манипулятора | 1986 |
|
SU1342720A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
