Изобретение относится к машиностроению и может быть использовано в автоматических манипуляторах с одним или двумя схватами.
Цель изобретения - сокращение энергозатрат и упрощение конструкции за счет получения ориентирующих движений исполнительного органа от одного привода.
На фиг. 1 показан исполнительный орган манипулятора, разрез; на фиг. 2 - вид А на фиг. 1.
Исполнительный орган манипулятора состоит из ведущего вала 1 с закрепленным на нем коническим зубчатым колесом, опор 2 качания, ведомого вала 3, установленного в опорах 4 для крепления основного и дополнительного схватов 5. На валу также крепится кронщтейн 6. Регулируемый упор 7 установлен на дополнительном корпусе 8, а сам корпус установлен в основном корпусе 9 на опорах 10 качания. На корпусе 8 крепится кронштейн 11, на основном корпусе 9 установлены регулируемые упоры 12 и 13, еще один регулируемый упор 14 установлен на корпусе 8.
Исполнительный орган манипулятора работает следующим образом.
Приводной вал 1 приводится во вращение электродвигателем и вращае ся на опорах 2. Через коническую передачу вращение передается на ведомый вал 3, который вращается на опорах 4. Вместе с ведомым валом вращаются относительно оси I-I и схваты 5, занимающие первоначально положение Б и В. Таким образом, происходит движение качания схватов. Схваты 5 занимают взаимно перпендикулярное положение, исходя из технологических требований. Когда кронштейн 6 упирается в регулируемый упо 7, расположенный на дополнительном корпусе 8, движение качания заканчивается. Так как вращающий момент от электродвигателя продолжает воздействовать на;вал 1, корпус 8 с
размещенной в нем конической передачей начинает вращаться относительно оси 1I-II и относительно основного корпуса 9 на опорах 10. Вращение продолжается до того момента, пока кронштейн 11, размещенный на корпусе 8, не доходит до регулируемого упора 12, размещенного на корпусе 9.
После этого движение вращения схватов прекращается. В результате двух движений (качания и вращения) схват, который занимает положение Б занимает положение В и наоборот, что необс ходимо для осуществления манипулятором своих технологических функций.
Движение в другую сторону происходит аналогичным образом, только в этом случае кронштейн 6 упирается в регулируемый упор 14, размещаемый на дополнительном корпусе 8, а кронштейн 11 упирается в упор 13, размещенный на основном корпусе 9.
гФормула изобретения
25
Исполнительный орган манипулятора, содержащий основной корпус, основной схаат, привод,имеющий механизмы вращения и качания основного схвата, кинематически связанные между собой, отличающийся тем, что, с целью сокращения энергозатрат и упрощения конструкции за счет получения ориентирующих движений исполнительно5 го органа от одного привода, он снабжен дополнительным схватом, дополнительным корпусом, соосным с основным корпусом и шарнирно связанньм с ним, фиксаторами, установленными на основном корпусе, а привод механизма качайия и вращения выполнен в виде конической зубчатой передачи, ведущее колесо которой соосно с основным корпусом и шарнирно связано с
5
0
дополнительным корпусом, а схваты расположены на концах оси ведомого конического колеса, при этом фиксаторы кинематически связаны с дополнительным корпусом.
&адА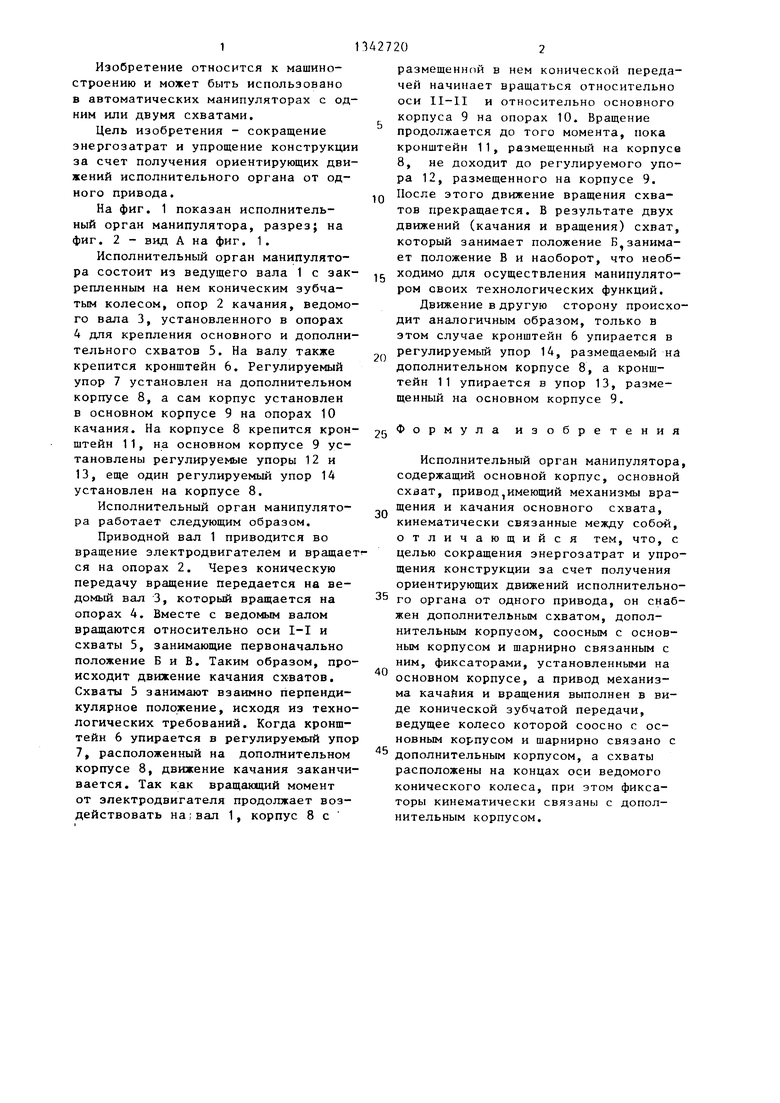
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1988 |
|
SU1627400A1 |
| Исполнительный орган манипулятора | 1989 |
|
SU1646845A1 |
| Устройство для перегрузки изделий | 1989 |
|
SU1668129A1 |
| Исполнительный орган манипулятора | 1975 |
|
SU541662A2 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Шарнир манипулятора | 1982 |
|
SU1057274A1 |
| Манипулятор | 1986 |
|
SU1357220A1 |
| Захватное устройство манипулятора | 2018 |
|
RU2700348C1 |
| Устройство для деформации текстильных конических паковок в отделочном производстве | 1988 |
|
SU1594230A1 |
| Манипулятор | 1984 |
|
SU1234178A1 |
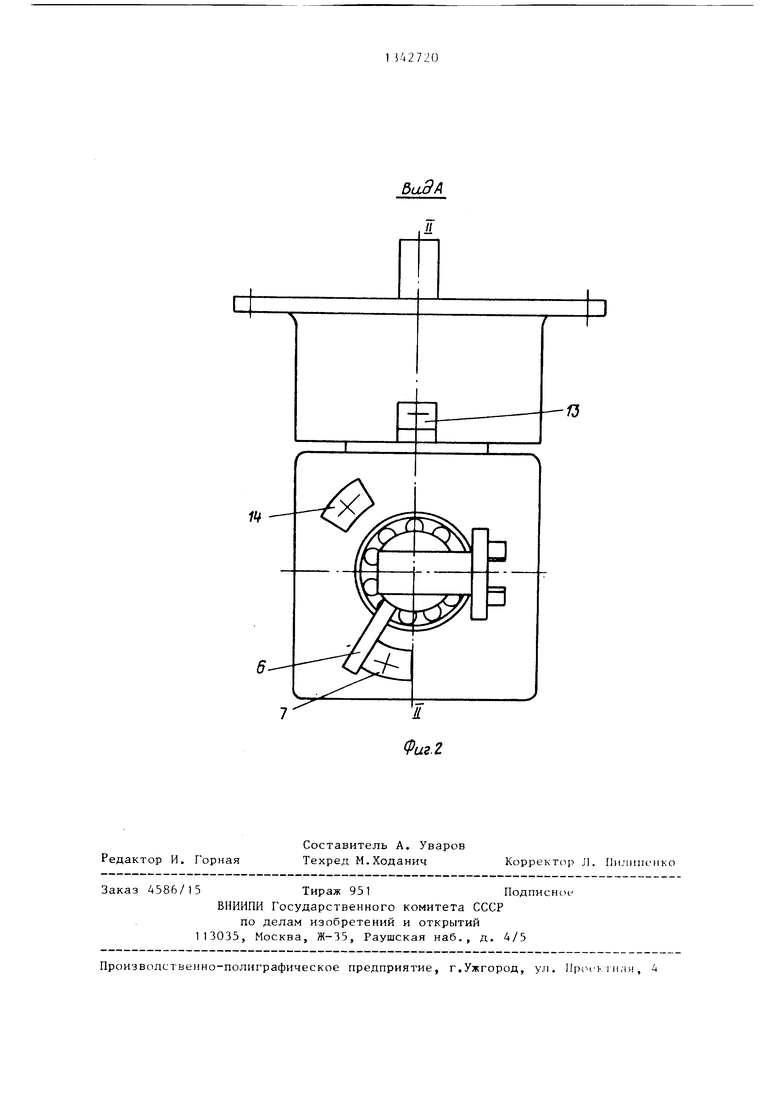
Изобретение относится к области машиностроения и может быть использовано в автоматических манипуляторах с одним или двумя схватами. Целью изобретения является сокращение энергозатрат и упрощение конструкции за счет получения ориентирующих движений исполнительного органа от одного привода. Вращение ведущего вала 1 от электродвигателя передается через коническую передачу на ведомый вал 3, вращающийся в опорах 4. Вместе с валом вращаются схваты 5. В тот момент, когда кронштейн 6 упирается в регулируемый упор 7, расположенный на дополнительном корпусе 8, начинается вращение корпуса 8 относительно основного корпуса 9 в опорах 10 до момента соприкосновения кронштейна 11 с регулируемым упором 12. В результате двух движений схват, занимавший положение Б, занимает положение В и наоборот. 2 ил. сл ОО 4 ьо ю Поло;кениеВф / Пояо/ еиие 6
Редактор И. Горная
Составитель А. Уваров Техред М.Ходанич
Заказ 4586/15Тираж 951Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
,«.-.1- - .- - -. - - - .- - - - -
Производстве)жо-полиграфическое предприятие, г.Ужгород, ул. Прсм кгнля, 4
Корректор Л. IInJiiiiiLMiKO
| Механизм ориентации схвата манипулятора | 1978 |
|
SU722756A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
