с
Ё
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод промышленного робота | 1983 |
|
SU1151448A1 |
| Захват робота | 1980 |
|
SU889422A1 |
| Устройство для сборки пакетов из плоских деталей | 1982 |
|
SU1025589A1 |
| Устройство для взаимной ориентации двух плоских деталей с прямолинейными базовыми сторонами | 1984 |
|
SU1399108A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Захват | 1976 |
|
SU558789A1 |
| Манипулирующее устройство для съема, кантования и выдачи изделий с пресса | 1987 |
|
SU1512775A1 |
| Захват промышленного робота | 1983 |
|
SU1114550A2 |
| Схват промышленного робота | 1983 |
|
SU1177150A2 |
Изобретение относится к машиностроению. Целью изобретения является повышение точности и надежности захвата плоских деталей переменной толщины за счет установки на губках направляющей и ползуна, шарнирно связанного с ведущим звеном захвата. При подаче давления в штоковую по- лость силового цилиндра губки сближаются. При несовпадении продольной оси детали с осью захвата соприкосновение губок с деталью осуществляется поочередно, а при захвате детали с переменной толщиной ведомые звенья 6 после соприкосновения губок с деталью остаются на месте, а ведущие звенья 5 вращаются до полного соприкосновения губок с деталью, преодолевая усилие пружины 9. 1 ил.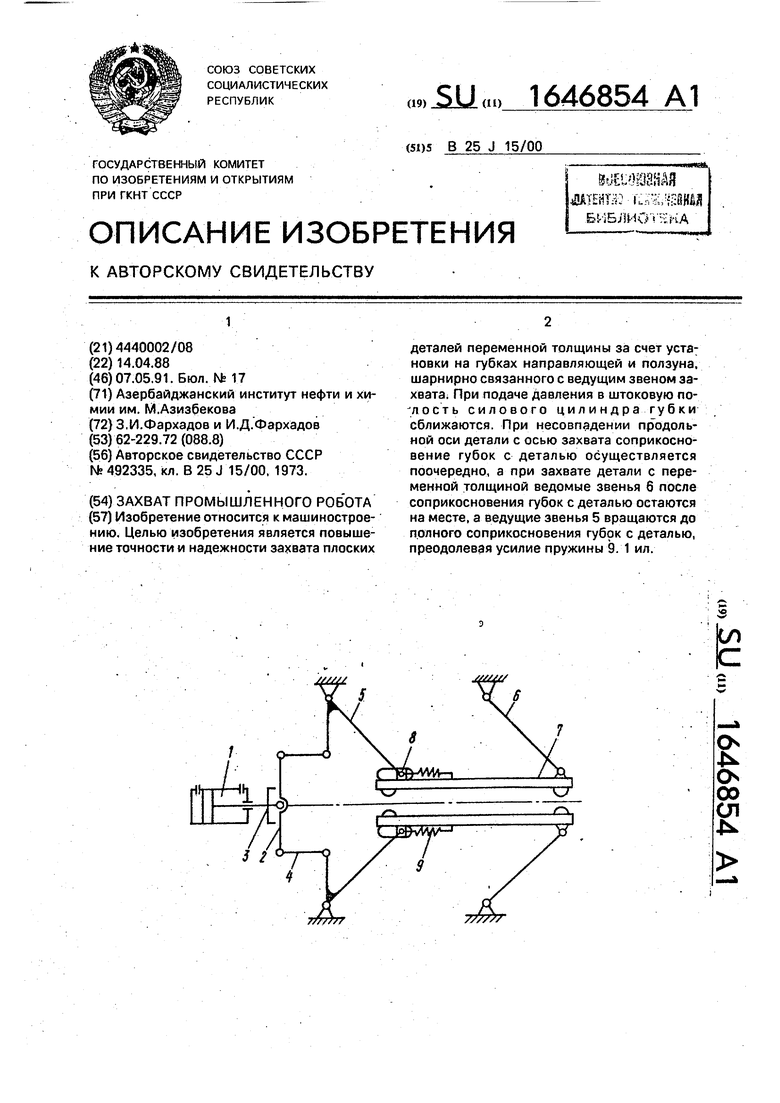
г
ON 00 СЛ J
Изобретение относится к машиностроению, в частности к захватам промыш- ленных роботов для механизации и автоматизации технологических процессов.
Цель изобретения - повышение точности и надежности захвата плоских деталей переменной толщины за счет установки на губках направляющей и ползуна, шарнирно связанного с ведущим звеном захвата.
На чертеже изображен захват. .
Захват состоит из привода 1, дифференциального рычага 2, ограничителя 3, поворотных рычагов 4, ведущих 5 и ведомых б звеньев, образующих с корпусом и губками 7 шарнирный параллелограмм, где ведущие звенья на местах соединения с губками, оснащенными ползуном 8, выполненным с возможностью перемещения вдоль подвижной направляющей и соединенным с губками пружиной 9,
Захват работает следующим образом.
При подаче давления в штоковую полость силового цилиндра осуществляется сближение губок, при несовпадении про0
5
0
дольной оси плоской детали с продольной осью захватного устройства соприкосновение губок с плоской деталью осуществляется поочередно, а при изменении профиля плоской детали ведомые звенья при соприкосновении с последним останутся на месте, а ведущие звенья вращаются до полного соприкосновения губок, преодолевая усилие пружины.
Формула изобретения Захват промышленного робота, содержащий корпус, зажимные губки, параллельные продольной оси захвата, каждая из которых образует с корпусом шарнирный параллелограмм, включающий в себя ведомые и ведущие звенья, отличающий- с я тем, что, с целью повышения точности и надежности захвата плоских деталей переменной толщины, каждая губка снабжена ползуном и направляющей, в которой размещен ползун, при этом пОлзун шарнирно закреплен на конце ведущего звена и подпружинен относительно направляющей.
| Устройство для подачи заготовок в горизонтально-ковочной машине | 1973 |
|
SU492335A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
