«
И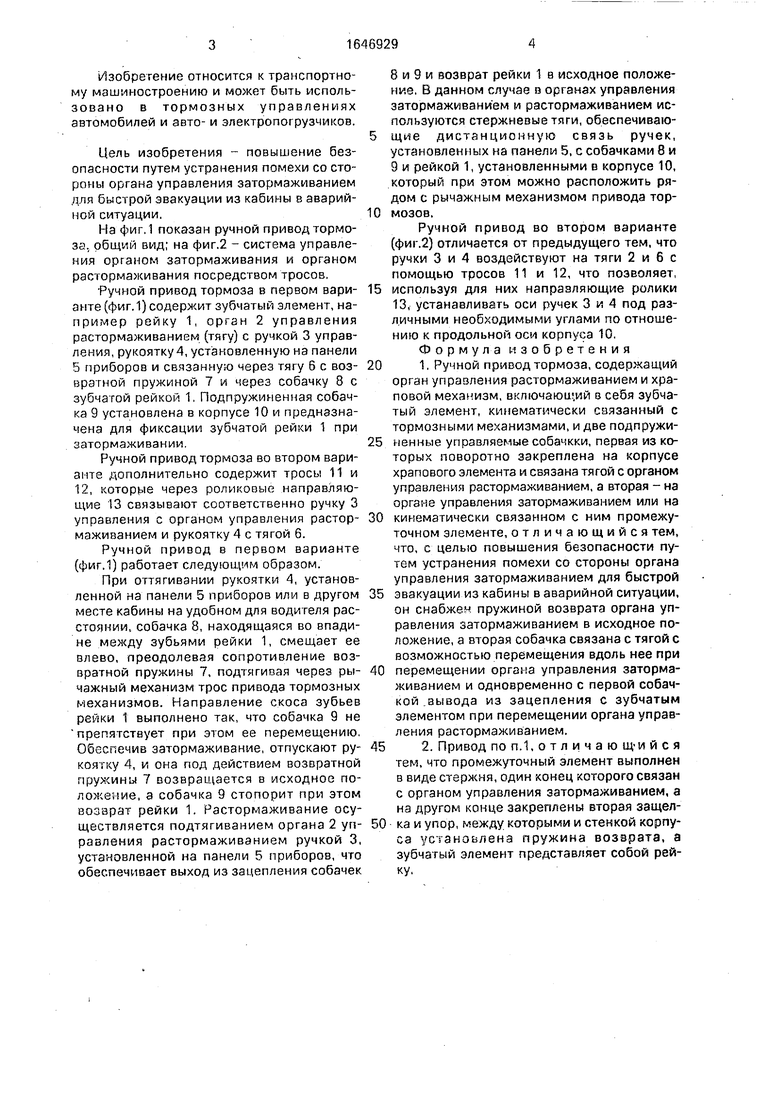
| название | год | авторы | номер документа |
|---|---|---|---|
| Ручной привод тормоза | 1990 |
|
SU1717441A2 |
| ПРИВОД СТОЯНОЧНОГО ТОРМОЗА | 2000 |
|
RU2191711C2 |
| ПРИВОД СТОЯНОЧНОГО ТОРМОЗА | 2007 |
|
RU2335418C1 |
| Привод стояночного тормоза | 1990 |
|
SU1722915A2 |
| Привод стояночного тормоза | 1988 |
|
SU1527044A1 |
| УСТРОЙСТВО ВРЕМЕННОГО ПОВЫШЕНИЯ ПРОХОДИМОСТИ БУКСУЮЩЕГО АВТОТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2478500C1 |
| УСТРОЙСТВО ДЛЯ ВРЕМЕННОГО ПОВЫШЕНИЯ ПРОХОДИМОСТИ БУКСУЮЩЕГО АВТОТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2478498C1 |
| УСТРОЙСТВО ВРЕМЕННОГО ПОВЫШЕНИЯ ПРОХОДИМОСТИ БУКСУЮЩЕГО АВТОТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2478499C1 |
| УСТРОЙСТВО ДЛЯ ВРЕМЕННОГО ПОВЫШЕНИЯ ПРОХОДИМОСТИ БУКСУЮЩЕГО АВТОТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2478497C1 |
| УСТРОЙСТВО ДЛЯ ВРЕМЕННОГО ПОВЫШЕНИЯ ПРОХОДИМОСТИ БУКСУЮЩЕГО АВТОТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2478496C1 |
Изобретение относится к транспортному машиностроению, в частности к тормозным управлениям автомобилей, авто- и электропогрузчиков. Цель изобретения - повышение безопасности путем устранения помехи со стороны органа управления затормаживанием для быстрой эвакуации из кабины в аварийной ситуации. Прямая зубчатая рейка 1, натягивающая через рычажный механизм приводные тросы тормозных механизмов, перемещается с помощью независимой от рейки 1 приводной рукоятки, тяги 6 с возвратной пружиной 7 и собачки 8, входящей во впадины между зубьями рейки 1. Рейка 1 фиксируется в крайнем рабочем положении с помощью несвязанной с ручкой 3 собачки 9, входящей во впадины между зубьями рейки 1, а рукоятка 4 под действием возвратной пружины 7 занимает исходное положение. 1 э.п. ф-лы, 2 ил.
Фиг.1
К рычажному
механизму
Mtrawvecxoto
приводи
К
О
ю кэ ю
Изобретение относится к транспортному машиностроению и может быть использовано в тормозных управлениях автомобилей и авто- и электропогрузчиков.
Цель изобретения - повышение безопасности путем устранения помехи со стороны органа управления затормаживанием дня быстрой эвакуации из кабины в аварийной ситуации.
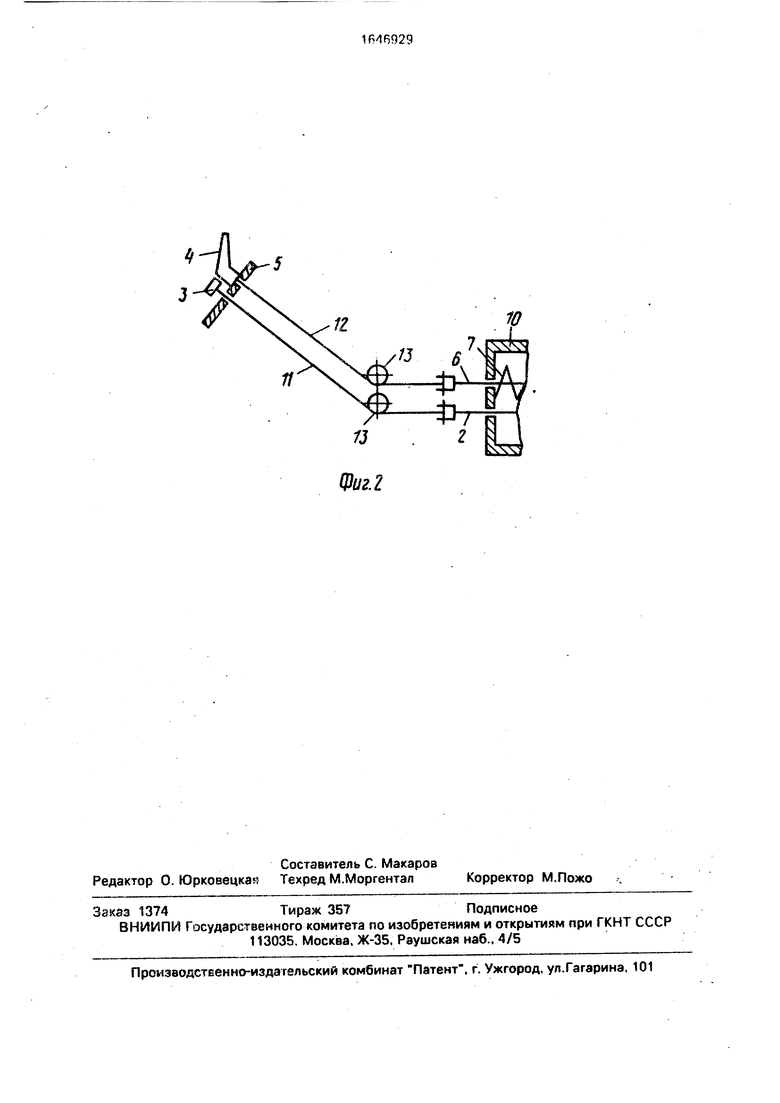
На фиг.1 показан ручной привод тормоза, общий вид; на фиг.2 - система управления органом затормаживания и органом растормаживания посредством тросов.
Ручной привод тормоза в первом варианте (фиг.1) содержит зубчатый элемент, например рейку 1, орган 2 управления растормаживанием (тягу) с ручкой 3 управления, рукоятку4, установленную на панели 5 приборов и связанную через тягу 6 с возвратной пружиной 7 и через собачку 8 с зубчатой рейкой 1. Подпружиненная собачка 9 установлена в корпусе 10 и предназначена для фиксации зубчатой рейки 1 при затормаживании.
Ручной привод тормоза во втором варианте дополнительно содержит тросы 11 и 12, которые через роликовые направляющие 13 связывают соответственно ручку 3 управления с органом управления растормаживанием и рукоятку 4 с тягой 6.
Ручной привод в первом варианте (фиг.1) работает следующим образом.
При оттягивании рукоятки 4, установленной на панели 5 приборов или в другом месте кабины на удобном для водителя расстоянии, собачка 8, находящаяся во впадине между зубьями рейки 1, смещает ее влево, преодолевая сопротивление возвратной пружины 7, подтягивая через рычажный механизм трос привода тормозных механизмов. Направление скоса зубьев рейки 1 выполнено так, что собачка 9 не препятствует при этом ее перемещению. Обеспечив затормаживание, отпускают рукоятку 4, и она под действием возвратной пружины 7 возвращается в исходное положение, а собачка 9 стопорит при этом возврат рейки 1. Растормаживание осуществляется подтягиванием органа 2 управления растормаживанием ручкой 3, установленной на панели 5 приборов, что обеспечивает выход из зацепления собачек
8и 9 и возврат рейки 1 в исходное положение. В данном случае в органах управления затормаживанием и растормаживанием используются стержневые тяги, обеспечивающие дистанционную связь ручек, установленных на панели 5, с собачками 8 и
9и рейкой 1, установленными в корпусе 10, который при этом можно расположить рядом с рычажным механизмом привода тормозов.
Ручной привод во втором варианте (фиг.2) отличается от предыдущего тем, что ручки 3 и 4 воздействуют на тяги 2 и 6 с помощью тросов 11 и 12, что позволяет,
используя для них направляющие ролики 13, устанавливать оси ручек 3 и 4 под различными необходимыми углами по отношению к продольной оси корпуса 10. Формула изобретения
орган управления растормажиеанием и храповой механизм, включающий в себя зубчатый элемент, кинематически связанный с тормозными механизмами, и две подпружиненные управляемые собачкки, первая из которых поворотно закреплена на корпусе храпового элемента и связана тягой с органом управления растормаживанием, а вторая - на органе управления затормаживанием или на
кинематически связанном с ним промежуточном элементе, отличающийся тем, что, с целью повышения безопасности путем устранения помехи со стороны органа управления затормаживанием для быстрой
эвакуации из кабины в аварийной ситуации, он снабжен пружиной возврата органа управления затормаживанием в исходное положение, а вторая собачка связана с тягой с возможностью перемещения вдоль нее при
перемещении органа управления затормаживанием и одновременно с первой собачкой вывода из зацепления с зубчатым элементом при перемещении органа управления растормаживанием.
Фиг. 2
&
i п
| Ручной привод тормоза | 1975 |
|
SU660870A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
