Известны устройства для программирования и автоматической обработки угла поворота в горизонтальной плоскостн стрелы, например, роторного экскаватора, включающие задатчик требуемой величины угла поворота, датчик фактической его величины и нуль-орган, выдающий снгнал на остановку привода поворота стрелы.
В описыг аемом устройстве его задатчик и датчик выполнены в виде сельсинов, смонтированных соответственно на осях поворота стрелы зкскаватора в вертикальной н горизонтальной плоскостях. Нуль-оргап, воспринимающий сигналы задатчика и датчика, представляет собой электронный усилитель с фазовым (нулевым) детектором.
Такое устройство дает возможность получать требуемый угол бокового откоса забоя и обеспечивает ненрерывное изменение угла поворота стрелы в зависимости от угла ее наклона в вертикальной плоскости.
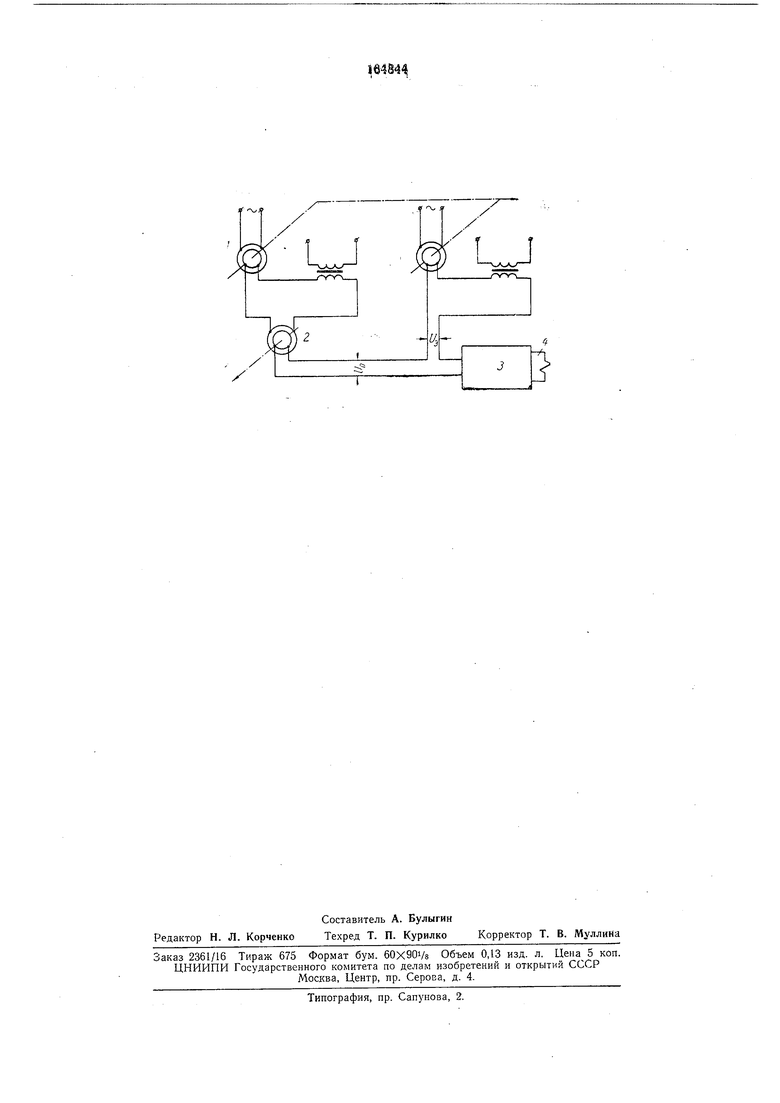
На чертеже изображена принципиальная схема устройства.
На оси вращения стрелы в вертикальной плоскости закреплены сельсннные датчнки /, а на оси вращения стрелы в горизонтальной нлоскости - сельсинный датчик 2.
указанных напряжении по амплитуде на выходе нуль-органа возникает сигнал окончания поворота, который передается в схему привода поворота, и поворот стрелы прекращается. Величина напряжения задания зависит от угла наклона стрелы в вертикальной плоскости и, следовательно, угол поворота стрелы в горизонтальной плоскости также зависит от угла ее наклона по вертикалп.
Предмет изобретения
Устройство для программирования н автоматической отработки угла новорота в горизонтальной нлоскости ст|)елы, напрнмер, роторного экскаватора, включающее задатчик требуемой величины угла поворота, датчик фактической его величипы и нуль-орган, выдающий снгнал на остановку привода поворота стрелы, отличающееся тем, что, с целью получения требуемого угла бокового откоса забоя н обеспечения непрерывного изменения угла новорота стрелы в зависимости от угла ее наклона в вертикальной плоскостн, его задатчик и датчик выполнены в виде сельсинов, смонтированных соответственно на осях поворота стрелы экскаватора в вертикальной и горизонтальной плоскостях, а нуль-орган, воспринимающий сигналы задатчика и датчика, представляет собой электронный усилитель с фазовым (нулевым) детектором.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство программного управления поворотным механизмом роторной стрелы экскаватора | 1987 |
|
SU1470879A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 1973 |
|
SU386075A1 |
| РОТОРНЫЙ ЭКСКАВАТОР | 1969 |
|
SU244209A1 |
| Устройство программного управления роторным экскаватором | 1979 |
|
SU870596A1 |
| Устройство программного управления роторной погрузочной машиной | 1984 |
|
SU1177419A1 |
| Устройство для управления роторным экскаватором при планировке рабочей площадки | 1981 |
|
SU1040051A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ОТКЛОНЕНИЯ РАБОЧЕГО | 1973 |
|
SU374422A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РАБОЧЕГО | 1972 |
|
SU351982A1 |
| Устройство формирования бокового откоса карьера для роторного экскаватора | 1972 |
|
SU546682A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 2023 |
|
RU2817340C1 |