1
Изобретение относится к области автоматизации технологических нроцессов мощных роторных экскаваторов, в частности к средствам автоматического контроля положения роторного колеса при формировании бокового откоса.
Известно устройство формирования бокового откоса карьера для роторного экскаватора, содержащее механизмы поворота и подъема стрелы экскаватора, сельсинные датчики и приемники поворота и подъема стрелы экскаватора.
Известное устройство не позволяет достичь достаточной точности работы мощных экскаваторов, поскольку оно обеспечивает условия задачи, весьма приближенные к истинным.
В целях повышения точности формирования откоса в предлагаемом устройстве установлен блок управлепия, выполненный в виде геометрической модели экскаватора, содерл ащей контактный ролик, закрепленный на стреле, кинематически связанной с сельсинами-приемниками поворота и подъема стрелы экскаватора, и объемного макета бокового откоса, представляющего собой контактную пластину, закрепленную под заданным углом.
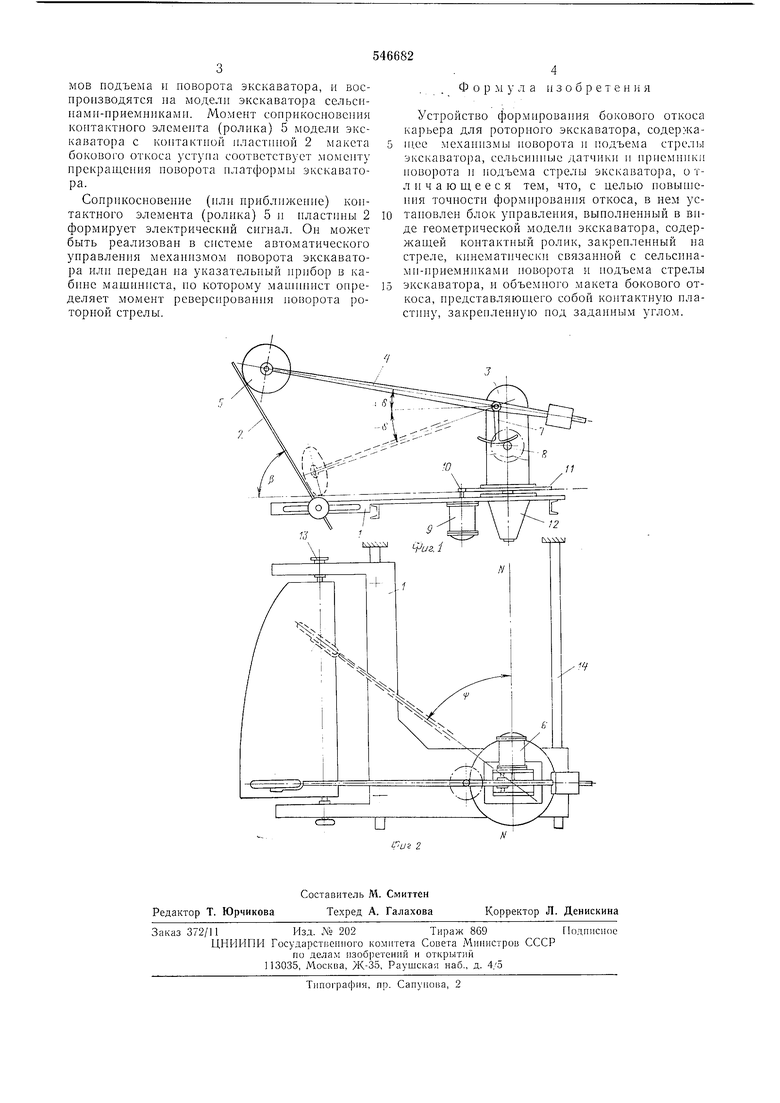
На фиг. 1 схематически изображено предлагаемое устройство, внд сбоку; на фиг. 2 - то же устройство, вид сверху.
Устройство содержит раму I, макет 2 бокового откоса уступа, выиолненный в виде контактной пластины, корпус 3 модели экскаватора, стрелу 4 модели экскаватора, контактный ролнк 5 модели экскаватора, выполняющий функции контактного элемента в электрической цени контроля, сельсин-приемник 6, выполняющпй функции подъемного двнгателя стрелы модели экскаватора, элементы 7 и 8 безлюфтового редуктора механизма подъема,
сельсин-приемник 9, выиолняющнй функции двигателя поворота платформы модели экскаватора, элементы 10 п 11 безлюфтового редуктора механизма иоворота, иодщинниковую груииу 12 оси иоворота корпуса модели экскаватора, зал имное устройство 13 для крепления макета бокового откоса, консольные опоры 14 для установкп устройства.
Устройство действует следующим образом. Макет откоса устанавливается в соответстВИИ с иасиортом забоя под заданным углом (5 н на заданном расстоянии относительно иродольной оси NN устройства. Положение осн стрелы модели по вертикали и в плане (углы 6 н ф) приводится в соответствие с истинным
положением стрелы экскаватора относнтельно горизонта и оси забоя, после чего устройство может быть включено в работу. Все онерацнн, связанные с подъемом и поворотом роторной стрелы экскаватора, воспринимаются сельсинамн-датчиками, действующими от механиз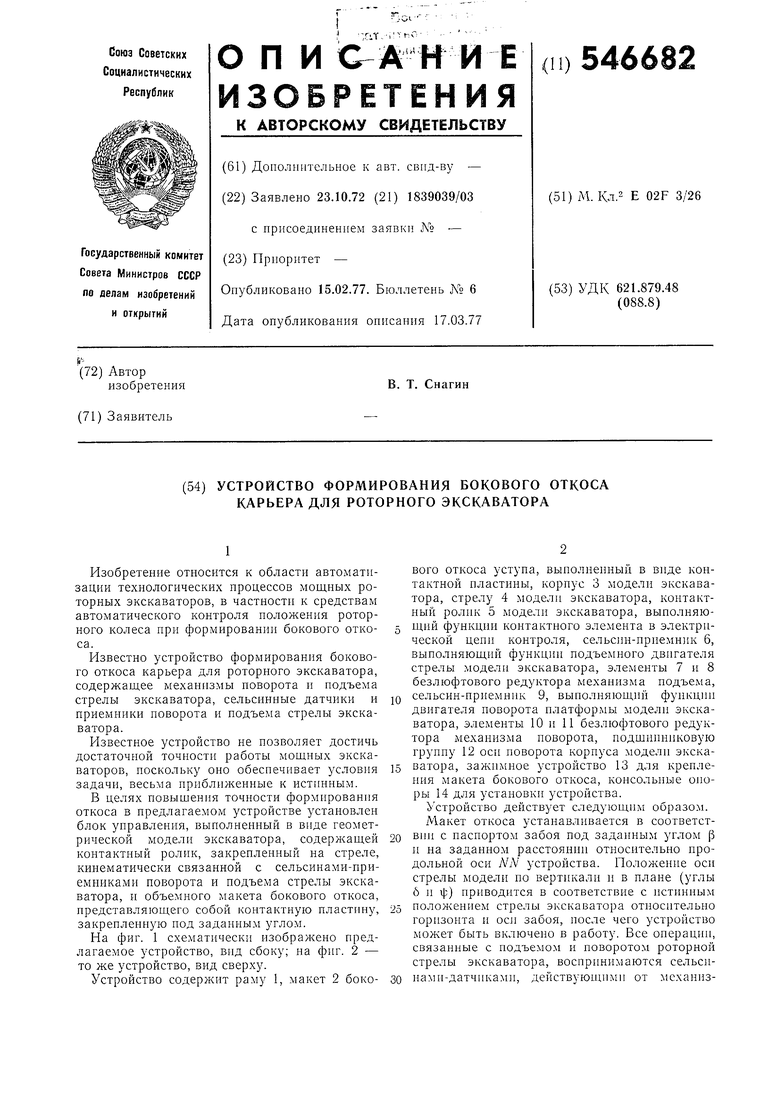
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство программного управления роторным экскаватором | 1979 |
|
SU870596A1 |
| Устройство программного управления поворотным механизмом роторной стрелы экскаватора | 1987 |
|
SU1470879A1 |
| РОТОРНЫЙ ЭКСКАВАТОР | 1969 |
|
SU244209A1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММИРОВАНИЯ и АВТОМАТИЧЕСКОЙ | 1964 |
|
SU164844A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 2023 |
|
RU2817340C1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 1973 |
|
SU386075A1 |
| Устройство для управления приво-дОМ пОВОРОТА КОВшА эКСКАВАТОРА | 1979 |
|
SU810913A1 |
| Устройство для автоматического управления поворотом роторной стрелы экскаватора | 1980 |
|
SU899761A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ОТКЛОНЕНИЯ РАБОЧЕГО | 1973 |
|
SU374422A1 |
| Устройство для автоматического управления электроприводом лебедки стрелы роторного экскаватора | 1960 |
|
SU133998A1 |
