Изобретение относится к устройствам управления средствами механизации ручного труда при съеме наработанных паковок с приемно-намоточных мест пневмомеханических прядильных машин.
Целью изобретения является повышение надежности и расширение технологических возможностей устройства управления манипулятором для съема паковок.
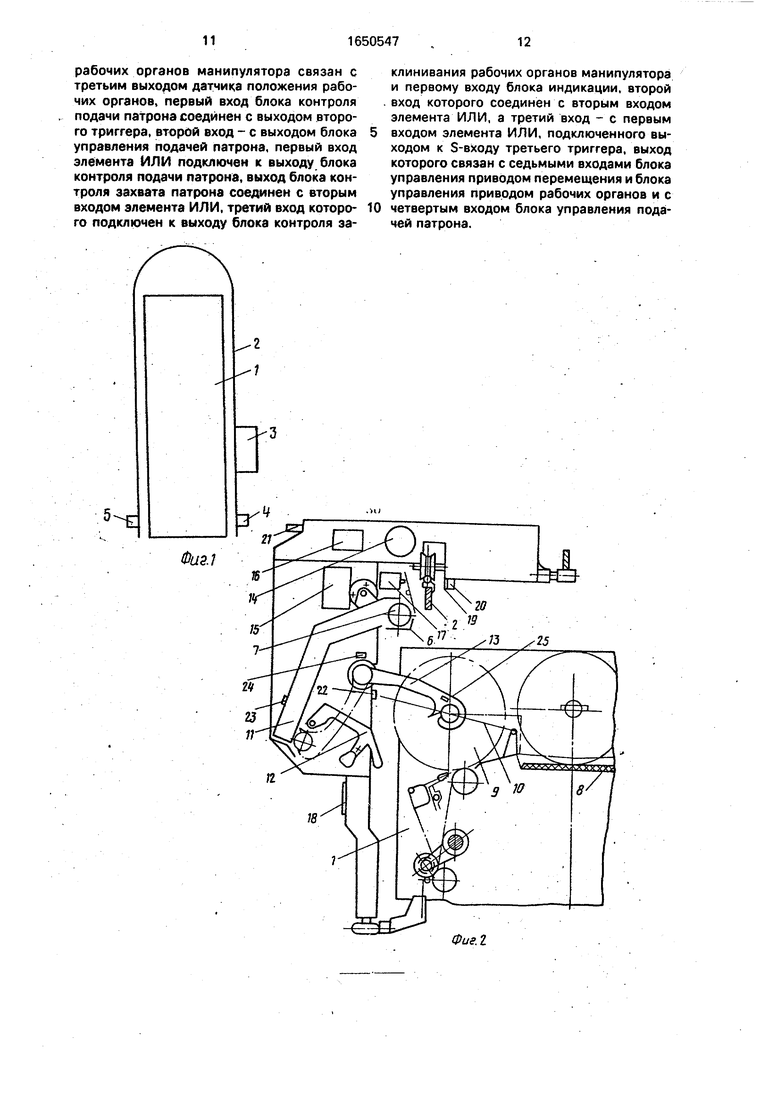
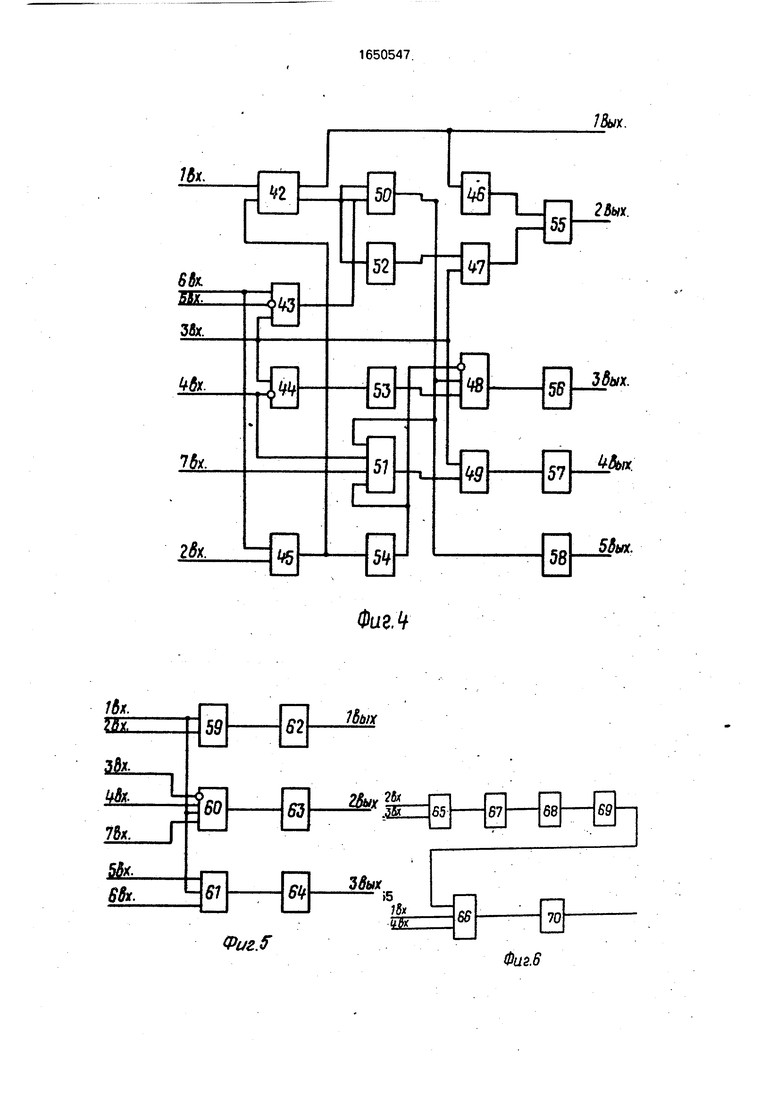
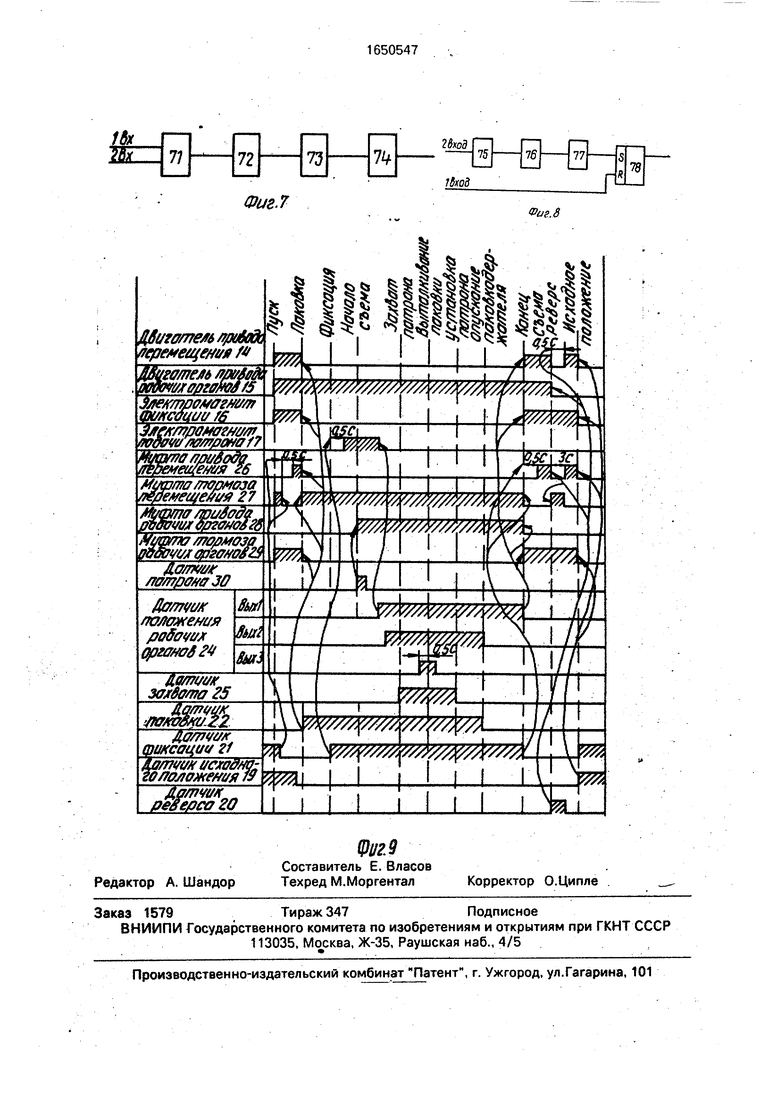
На фиг.1 показана машина с установленным на ней манипулятором, общий вид; на фиг.2 - манипулятор для съема паковок; на фиг.З - схема устройства управления манипулятором для съема паковок; на фиг.4 - схема блока управления приводом перемещения; на фиг.5 - схема блока управления приводом рабочих органов; на фиг.б - схема блока управления подачей патрона; на фиг.7 - схема блока контроля лодачи патрона; на фиг.8 - схема блока контроля заклинивания; на фиг.9 - диаграмма, поясняющая работу устройства управления манипулятором для съема паковок.
Устройство содержит пневмопрядиль- ную машину 1, путепровод 2, на котором установлен манипулятор 3 для съема паковок. Также указаны места расположения уп- равляющих элементов, исходное положение манипулятора 4, положение реверсирования манипулятора 5.
В состав путепровода 2 входит полка б, на которой находятся патроны 7, Путепровод 2 установлен на машине 1, на которой имеется транспортер 8, предназначенный для доставки снятой паковки 9 в хвостовую часть машины, а также паковкодержатель 10, в зажимном устройстве которого установлена паковка 9. Манипулятор для съема паковок (фиг.2) содержит лоток 11 для обеспечения определенной траектории движения патрона 7 после его сброса с полки 6, а также рабочие органы: механизм 12 управления паковкодержателем для подъема па- ковкодержателя 10 и разжима его рычагов, рычаг 13 для захвата патрона 7 в лотке 11, а также для выталкивания из зажимного устройства паковкодержателя 10 наработанной паковки 9 и установки вместо нее патрона 7; двигатель 14 привода перемещения манипулятора по путепроводу 2, двигатель 15 привода рабочих органов при съеме наработанной паковки 9, электромагнит 16 фиксации манипулятора, с помощью которого манипулятор фиксируется на местах съема паковок, электромагнит 17 подачи патрона 7 в лоток 11, кнопочный пульт 18 управления для ручного управления работой манипулятора.
На манипуляторе имеются датчик 19 исходного положения манипулятора на путепроводе 2 и датчик 20 реверса манипулятора, взаимодействующие с управляющими элементами 4 и 5, установленными на путепроводе 2.
Датчик 21 фиксации манипулятора служит для контроля фиксации манипулятора 3 на путепроводе 2 при съеме паковки 9. Датчик 22 съема паковки служит для определения места съема наработанной паковки при
движении манипулятора 3 из исходного положения в направлении места реверса.
Датчик 23 прохождения патрона предназначен для контроля прохождения патрона 7 в лоток 11.
Датчик 24 положения рабочих органов служит для контроля исходного положения рабочих органов манипулятора; для контроля заклинивания рабочих органов манипулятора во время съема паковки 9; для блокировки датчика 25 захвата.
Датчик 25 захвата патрона служит для контроля захвата патрона 7 рычагом 13. (В качестве датчиков 19-25 могут быть использованы бесконтактные индуктивные выключатели, работающие по принципу срыва генерации автогенератора при приближении к его контуру металлической пластины, являющейся управляющим элементом).
Устройство управления манипулятором для съема паковок (фиг.З) содержит приводную 26 и тормозную 27 муфты, входящие в состав привода перемещения манипулятора, а также приводную 28 и тормозную 29
муфты, входящие в состав привода рабочих органов манипулятора, триггер 30, блок 31 управления приводом перемещения, блок 32 управления приводом рабочих органов, элемент И 33, блок 35 контроля подачи патрона, блок 36 управления подачей патрона, блок 37 контроля захвата патрона, блок 38 контроля заклинивания рабочих органов манипулятора, блок 39 индикации и элемент ИЛИ 40.
Блок управления приводом перемещения (фиг.4) содержит триггер 42, элементы И 43-49, элементы ИЛИ 50 и 51, схемы 52 и 53 временных задержек, одновибратор54, усилители 55-58.
Блок управления приводом рабочих органов (фиг.5) содержит элементы И 59-61, усилители 62-64,
Блок управления подачей патрона (фиг.б) содержит элементы И 65 и 66, ключ
67, времязадающую цепь 68, пороговый элемент 69 и усилитель 70.
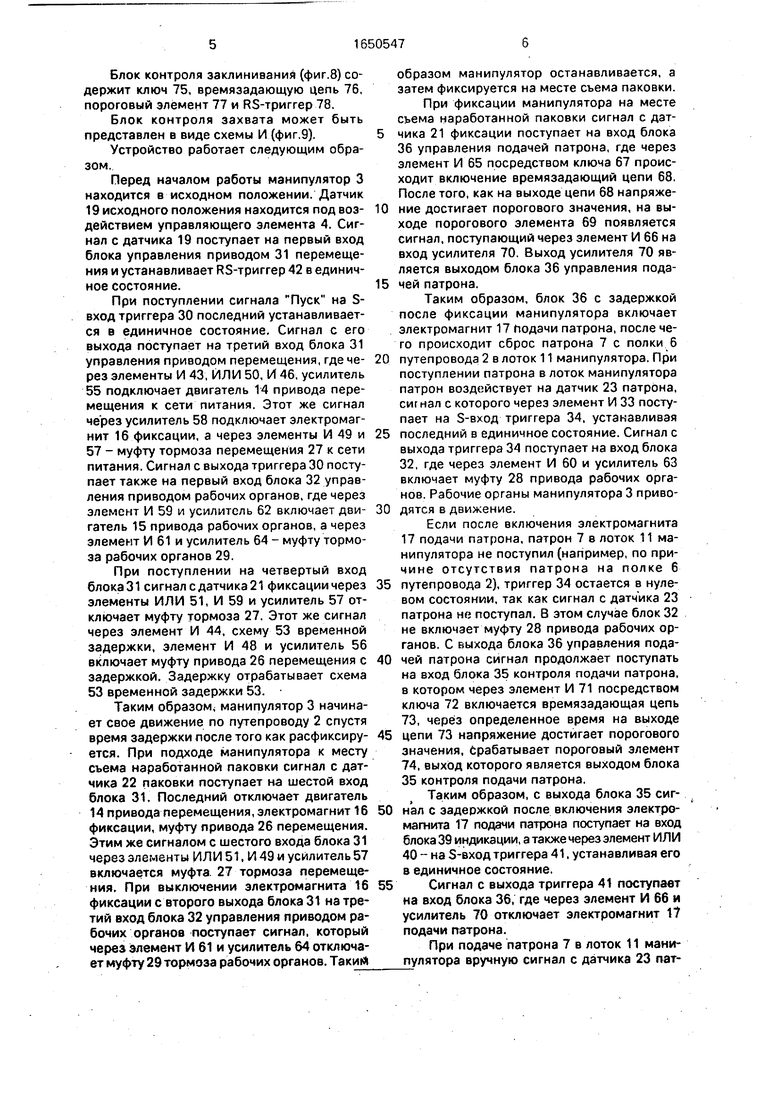
Блок контроля подачи патрона (фиг.7) содержит элемент И 71, ключ 72, времязадающую цепь 73 и пороговый элемент 74.
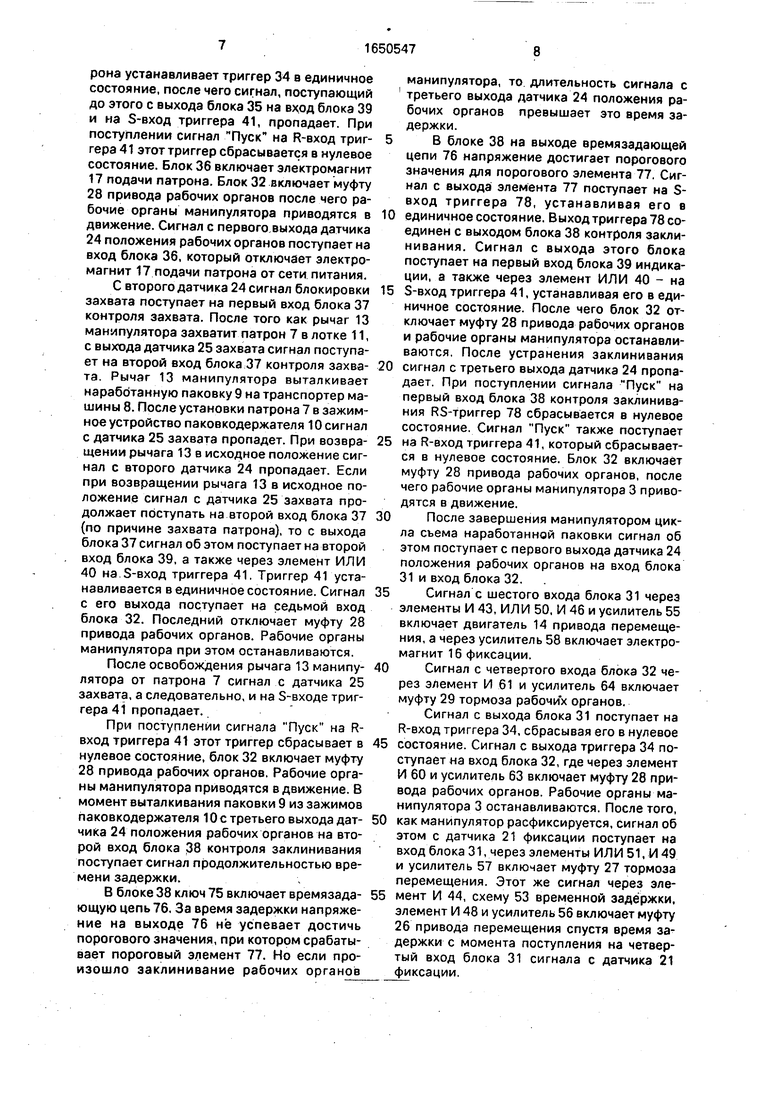
Блок контроля заклиниваний (фиг.8) содержит ключ 75, времязадающую цепь 76, пороговый элемент 77 и RS-триггер 78.
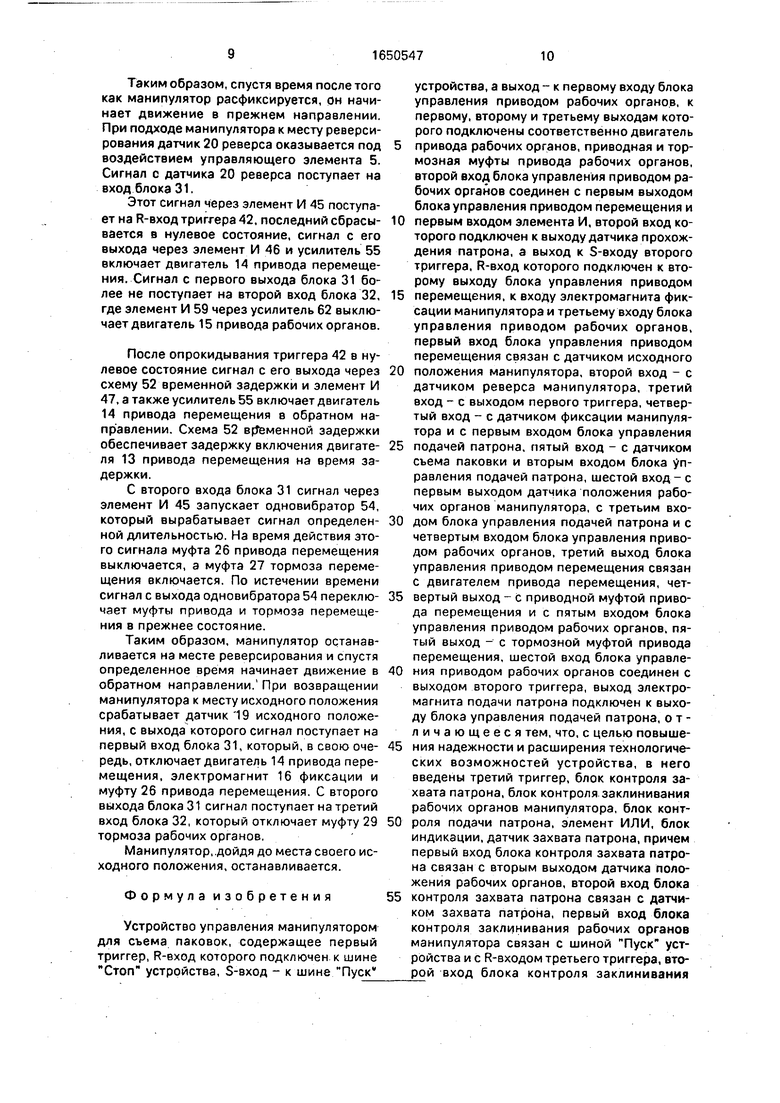
Блок контроля захвата может быть представлен в виде схемы И (фиг.9).
Устройство работает следующим образом.
Перед началом работы манипулятор 3 находится в исходном положении. Датчик 19 исходного положения находится под воздействием управляющего элемента 4. Сигнал с датчика 19 поступает на первый вход блока управления приводом 31 перемещения и устанавливает RS-триггер 42 в единичное состояние.
При поступлении сигнала Пуск на S- вход триггера 30 последний устанавливается в единичное состояние. Сигнал с его выхода поступает на третий вход блока 31 управления приводом перемещения, где через элементы И 43, ИЛИ 50, И 46, усилитель 55 подключает двигатель 14 привода перемещения к сети питания. Этот же сигнал через усилитель 58 подключает электромагнит 16 фиксации, а через элементы И 49 и 57 - муфту тормоза перемещения 27 к сети питания. Сигнал с выхода триггера 30 поступает также на первый вход блока 32 управления приводом рабочих органов, где через элемент И 59 и усилитель 62 включает двигатель 15 привода рабочих органов, а через элемент И 61 и усилитель 64 - муфту тормоза рабочих органов 29.
При поступлении на четвертый вход блока 31 сигнал с датчика 21 фиксации через элементы ИЛИ 51, И 59 и усилитель 57 отключает муфту тормоза 27. Этот же сигнал через элемент И 44, схему 53 временной задержки, элемент И 48 и усилитель 56 включает муфту привода 26 перемещения с задержкой. Задержку отрабатывает схема 53 временной задержки 53.
Таким образом, манипулятор 3 начинает свое движение по путепроводу 2 спустя время задержки после того как расфиксиру- ется. При подходе манипулятора к месту съема наработанной паковки сигнал с датчика 22 паковки поступает на шестой вход блока 31. Последний отключает двигатель 14 привода перемещения, электромагнит 16 фиксации, муфту привода 26 перемещения. Этим же сигналом с шестого входа блока 31 через элементы ИЛИ 51, И 49 и усилитель 57 включается муфта 27 тормоза перемещения. При выключении электромагнита 16 фиксации с второго выхода блока 31 на третий вход блока 32 управления приводом рабочих органов поступает сигнал, который через элемент И 61 и усилитель 64 отключает муфту 29 тормоза рабочих органов. Таким
образом манипулятор останавливается, а
затем фиксируется на месте съема паковки.
При фиксации манипулятора на месте
съема наработанной паковки сигнал с датчика 21 фиксации поступает на вход блока 36 управления подачей патрона, где через элемент И 65 посредством ключа 67 происходит включение времязадающий цепи 68, После того, как на выходе цепи 68 напряже0 ние достигает порогового значения, на выходе порогового элемента 69 появляется сигнал, поступающий через элемент И 66 на вход усилителя 70. Выход усилителя 70 является выходом блока 36 управления пода5 чей патрона.
Таким образом, блок 36 с задержкой после фиксации манипулятора включает электромагнит 17 подачи патрона, после чего происходит сброс патрона 7 с полки 6
0 путепровода 2 в лоток 11 манипулятора. При поступлении патрона в лоток манипулятора патрон воздействует на датчик 23 патрона, сиг нал с которого через элемент И 33 поступает на S-вход триггера 34, устанавливая
5 последний в единичное состояние. Сигнал с выхода триггера 34 поступает на вход блока 32, где через элемент И 60 и усилитель 63 включает муфту 28 привода рабочих органов. Рабочие органы манипулятора 3 приво0 дятся в движение.
Если после включения электромагнита 17 подачи патрона, патрон 7 в лоток 11 манипулятора не поступил (например, по причине отсутствия патрона на полке 6
5 путепровода 2), триггер 34 остается в нулевом состоянии, так как сигнал с датчика 23 патрона не поступал. В этом случае блок 32 не включает муфту 28 привода рабочих органов. С выхода блока 36 управления пода0 чей патрона сигнал продолжает поступать на вход блока 35 контроля подачи патрона, в котором через элемент И 71 посредством ключа 72 включается времязадающая цепь
73,через определенное время на выходе 5 цепи 73 напряжение достигает порогового
значения, Срабатывает пороговый элемент
74,выход которого является выходом блока 35 контроля подачи патрона.
Таким образом, с выхода блока 35 сиг- 0 нал с задержкой после включения электромагнита 17 подачи патрона поступает на вход блока 39 индикации, а также через элемент ИЛИ 40 - на S-вход триггера 41, устанавливая его в единичное состояние.
5 Сигнал с выхода триггера 41 поступает на вход блока 36, где через элемент И 66 и усилитель 70 отключает электромагнит 1 подачи патрона.
При подаче патрона 7 в лоток 11 манипулятора вручную сигнал с датчика 23 патрона устанавливает триггер 34 в единичное состояние, после чего сигнал, поступающий до этого с выхода блока 35 на вход блока 39 и на S-вход триггера 41, пропадает. При поступлении сигнал Пуск на R-вход триггера 41 этот триггер сбрасывается в нулевое состояние. Блок 36 включает электромагнит 17 подачи патрона. Блок 32 включает муфту 28 привода рабочих органов после чего рабочие органы манипулятора приводятся в движение. Сигнал с первого выхода датчика 24 положения рабочих органов поступает на вход блока 36, который отключает электромагнит 17 подачи патрона от сети питания.
С второго датчика 24 сигнал блокировки захвата поступает на первый вход блока 37 контроля захвата. После того как рычаг 13 манипулятора захватит патрон 7 в лотке 11, с выхода датчика 25 захвата сигнал поступает на второй вход блока 37 контроля захвата. Рычаг 13 манипулятора выталкивает нарабо танную паковку 9 на транспортер машины 8. После установки патрона 7 в зажимное устройство паковкодержателя 10 сигнал с датчика 25 захвата пропадет. При возвращении рычага 13 в исходное положение сигнал с второго датчика 24 пропадает. Если при возвращении рычага 13 в исходное положение сигнал с датчика 25 захвата продолжает поступать на второй вход блока 37 (по причине захвата патрона), то с выхода блока 37 сигнал об этом поступает на второй вход блока 39, а также через элемент ИЛИ 40 на S-вход триггера 41. Триггер 41 устанавливается в единичное состояние. Сигнал с его выхода поступает на седьмой вход блока 32. Последний отключает муфту 28 привода рабочих органов. Рабочие органы манипулятора при этом останавливаются.
После освобождения рычага 13 манипулятора от патрона 7 сигнал с датчика 25 захвата, а следовательно, и на S-входе триггера 41 пропадает.
При поступлении сигнала Пуск на R- вход триггера 41 этот триггер сбрасывает в нулевое состояние, блок 32 включает муфту 28 привода рабочих органов. Рабочие органы манипулятора приводятся в движение. В момент выталкивания паковки 9 из зажимов паковкодержателя 10с третьего выхода датчика 24 положения рабочих органов на второй вход блока 38 контроля заклинивания поступает сигнал продолжительностью времени задержки.
В блоке 38 ключ 75 включает времязада- ющую цепь 76. За время задержки напряжение на выходе 76 не успевает достичь порогового значения, при котором срабатывает пороговый элемент 77. Но если произошло заклинивание рабочих органов
манипулятора, то длительность сигнала с третьего выхода датчика 24 положения рабочих органов превышает это время задержки.
В блоке 38 на выходе времязадающей
цепи 76 напряжение достигает порогового значения для порогового элемента 77. Сигнал с выхода элемента 77 поступает на S- вход триггера 78, устанавливая его е
0 единичное состояние. Выход триггера 78 соединен с выходом блока 38 контроля заклинивания. Сигнал с выхода этого блока поступает на первый вход блока 39 индикации, а также через элемент ИЛИ 40 - на
5 S-вход триггера 41, устанавливая его в единичное состояние. После чего блок 32 отключает муфту 28 привода рабочих органов и рабочие органы манипулятора останавливаются. После устранения заклинивания
0 сигнал с третьего выхода датчика 24 пропадает. При поступлении сигнала Пуск на первый вход блока 38 контроля заклинивания RS-триггер 78 сбрасывается в нулевое состояние. Сигнал Пуск также поступает
5 на R-вход триггера 41, который сбрасывается в нулевое состояние. Блок 32 включает муфту 28 привода рабочих органов, после чего рабочие органы манипулятора 3 приводятся в движение.
0 После завершения манипулятором цикла съема наработанной паковки сигнал об этом поступает с первого выхода датчика 24 положения рабочих органов на вход блока 31 и вход блока 32.
5 Сигнал с шестого входа блока 31 через элементы И 43, ИЛИ 50, И 46 и усилитель 55 включает двигатель 14 привода перемещения, а через усилитель 58 включает электромагнит 16 фиксации.
0 Сигнал с четвертого входа блока 32 через элемент И 61 и усилитель 64 включает муфту 29 тормоза рабочих органов.
Сигнал с выхода блока 31 поступает на R-вход триггера 34, сбрасывая его в нулевое
5 состояние. Сигнал с выхода триггера 34 поступает на вход блока 32, где через элемент И 60 и усилитель 63 включает муфту 28 привода рабочих органов. Рабочие органы манипулятора 3 останавливаются. После того,
0 как манипулятор расфиксируется, сигнал об этом с датчика 21 фиксации поступает на вход блока 31, через элементы ИЛИ 51, И 49 и усилитель 57 включает муфту 27 тормоза перемещения. Этот же сигнал через эле5 мент И 44, схему 53 временной задержки, элемент И 48 и усилитель 56 включает муфту 26 привода перемещения спустя время задержки с момента поступления на четвертый вход блока 31 сигнала с датчика 21 фиксации.
Таким образом, спустя время после того как манипулятор расфиксируется, он начинает движение в прежнем направлении. При подходе манипулятора к месту реверсирования датчик 20 реверса оказывается под воздействием управляющего элемента 5. Сигнал с датчика 20 реверса поступает на вход блока 31.
Этот сигнал через элемент И 45 поступает на R-вход триггера 42, последний сбрасывается в нулевое состояние, сигнал с его выхода через элемент И 46 и усилитель 55 включает двигатель 14 привода перемещения. Сигнал с первого выхода блока 31 более не поступает на второй вход блока 32, где элемент И 59 через усилитель 62 выключает двигатель 15 привода рабочих органов.
После опрокидывания триггера 42 в нулевое состояние сигнал с его выхода через схему 52 временной задержки и элемент И 47, а также усилитель 55 включает двигатель 14 привода перемещения в обратном направлении. Схема 52 временной задержки обеспечивает задержку включения двигателя 13 привода перемещения на время задержки.
С второго входа блока 31 сигнал через элемент И 45 запускает одновибратор 54, который вырабатывает сигнал определенной длительностью. На время действия этого сигнала муфта 26 привода перемещения выключается, а муфта 27 тормоза перемещения включается. По истечении времени сигнал с выхода одновибратора 54 переключает муфты привода и тормоза перемещения в прежнее состояние.
Таким образом, манипулятор останавливается на месте реверсирования и спустя определенное время начинает движение в обратном направлении. При возвращении манипулятора к месту исходного положения срабатывает датчик 19 исходного положения, с выхода которого сигнал поступает на первый вход блока 31, который, в свою очередь, отключает двигатель 14 привода перемещения, электромагнит 16 фиксации и муфту 26 привода перемещения. С второго выхода блока 31 сигнал поступает на третий вход блока 32, который отключает муфту 29 тормоза рабочих органов.
Манипулятор, дойдя до места своего исходного положения, останавливается.
Формула изобретения
Устройство управления манипулятором для съема паковок, содержащее первый триггер, R-вход которого подключен к шине Стоп устройства, S-вход - к шине Пуск
устройства, а выход - к первому входу блока управления приводом рабочих органов, к первому, второму и третьему выходам которого подключены соответственно двигатель
привода рабочих органов, приводная и тормозная муфты привода рабочих органов, второй вход блока управления приводом рабочих органов соединен с первым выходом блока управления приводом перемещения и
0 первым входом элемента И, второй вход которого подключен к выходу датчика прохождения патрона, а выход к S-входу второго триггера, R-вход которого подключен к второму выходу блока управления приводом
5 перемещения, к входу электромагнита фиксации манипулятора и третьему входу блока управления приводом рабочих органов, первый вход блока управления приводом перемещения связан с датчиком исходного
0 положения манипулятора, второй вход - с датчиком реверса манипулятора, третий вход - с выходом первого триггера, четвертый вход - с датчиком фиксации манипулятора и с первым входом блока управления
5 подачей патрона, пятый вход - с датчиком съема паковки и вторым входом блока управления подачей патрона, шестой вход - с первым выходом датчика положения рабочих органов манипулятора, с третьим вхо0 дом блока управления подачей патрона и с четвертым входом блока управления приводом рабочих органов, третий выход блока управления приводом перемещения связан с двигателем привода перемещения, чет5 вертый выход - с приводной муфтой привода перемещения и с пятым входом блока управления приводом рабочих органов, пятый выход - с тормозной муфтой привода перемещения, шестой вход блока управле0 ния приводом рабочих органов соединен с выходом второго триггера, выход электромагнита подачи патрона подключен к выходу блока управления подачей патрона, отличающееся тем, что, с целью повыше5 ния надежности и расширения технологических возможностей устройства, в него введены третий триггер, блок контроля захвата патрона, блок контроля заклинивания рабочих органов манипулятора, блок конт0 роля подачи патрона, элемент ИЛИ, блок индикации,датчик захвата патрона, причем первый вход блока контроля захвата патрона связан с вторым выходом датчика положения рабочих органов, второй вход блока
5 контроля захвата патрона связан с датчиком захвата патрона, первый вход блока контроля заклинивания рабочих органов манипулятора связан с шиной Пуск устройства и с R-входом третьего триггера, второй вход блока контроля заклинивания
рабочих органов манипулятора связан с третьим выходом датчика положения рабочих органов, первый вход блока контроля подачи патрона соединен с выходом второго триггера, второй вход - с выходом блока управления подачей патрона, первый вход элемента ИЛИ подключен к выходу блока контроля подачи патрона, выход блока контроля захвата патрона соединен с вторым входом элемента ИЛИ, третий вход которого подключен к выходу блока контроля за0
клинивания рабочих органов манипулятора и первому входу блока индикации, второй вход которого соединен с вторым входом элемента ИЛИ, а третий вход - с первым входом элемента ИЛИ, подключенного выходом к S-входу третьего триггера, выход которого связан с седьмыми входами блока управления приводом перемещения и блока управления приводом рабочих органов и с четвертым входом блока управления подачей патрона.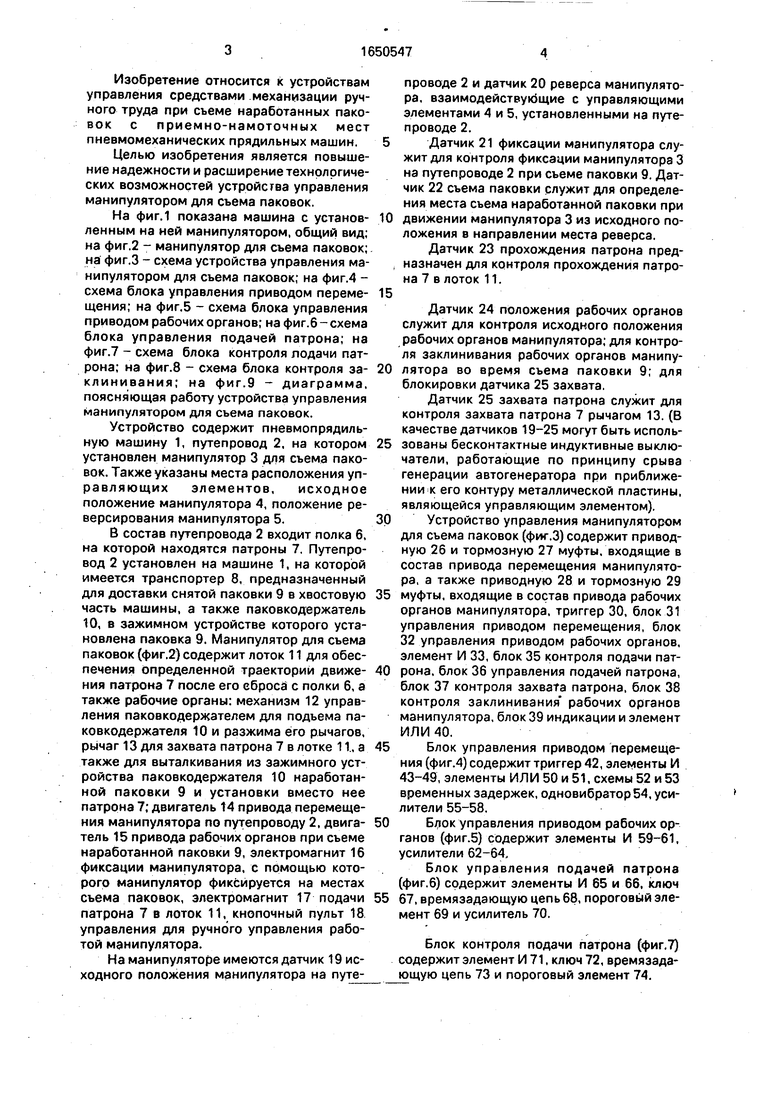
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ НАСАДКИ ПАКОВОК НА НОСИТЕЛЬ | 1993 |
|
RU2051244C1 |
| АВТОМАТ ДЛЯ ПРЯДЕНИЯ И ПЕРЕМАТЫВАНИЯ ПРЯЖИ | 1991 |
|
RU2009281C1 |
| Устройство для съема паковок на текстильной машине, преимущественно пневмомеханической прядильной машине | 1988 |
|
SU1671747A1 |
| УСТАНОВКА ДЛЯ ФОРМИРОВАНИЯ И РАСФОРМИРОВАНИЯ НОСИТЕЛЕЙ | 1996 |
|
RU2100502C1 |
| Устройство управления манипулятором для приема и перегрузки паковок с рабочих мест | 1979 |
|
SU861260A1 |
| Устройство управления манипулятором для приема и перегрузки паковок | 1984 |
|
SU1227582A1 |
| Автоматическая мотальная машина | 1988 |
|
SU1650548A1 |
| Станок для намотки ленточного материала | 1979 |
|
SU867826A1 |
| СПОСОБ ФОРМИРОВАНИЯ ПАРТИИ БОБИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2483015C2 |
| Устройство для деформации текстильных паковок в отделочном производстве | 1987 |
|
SU1509453A1 |
Изобретение относится к устройствам управления средствами механизации ручного труда при съеме наработанных паковок с приемно-намоточных мест пневмомеханических прядильных машин. Изобретение позволяет повысить надежность и расширить технологические возможности устройства управления манипулятором для съема паковок за счет того, что оно снабжено третьим триггером 41, блоком контроля захвата патрона 37, блоком контроля заклинивания рабочих органов манипулятора 38, блоком контроля подачи патрона 34, элементом ИЛИ 40, блоком индикации 39, датчиком захвата патрона 25. Устройство позволяет контролировать аварийные ситуации, например такие, как заклинивание паковки, захват патрона, и идентифицировать их. 9 ил. fe ( СЛ О СЛ Јь v| кш
Фаз. 1
ц
ЈSЈQ
Фиг. 2
f- т
in о in
(О
cv
Фиг.7
йбигателб л/кбаЗЬ Ъфеяегдем/г W
Двигатель mvwtWtffwJ/S
Зле#щром0г#м wv/fcoituu /6
V0fffl{/&
чеще/л
IIJUISWU..
УМ/Я гб
Мушта/пармоза /кремесцем/я 27
vm ffffa
W&KffM6 6
Мудуяощ0м л. л а шфго#ов&
&аят/г
/rff/fffffftfffjff
Д0/тж
ломжения
podawx
QpzffwSM
йатиж за/да/по 25
№
Aorrwvx фиксации 21
ҐЫ 1 I
I t i I I I I I I I
Фц.8
| Кровля из глиняных обожженных плит с арматурой из проволочной сетки | 1921 |
|
SU120A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
