тельно левых 20 и правых 21 паковкодержателей. Выходы датчиков положения 14 и 75 (см. фиг. 1) через согласуюи,ий элемент 3 электрически связаны с входом блока управления 2.
Устройство работает следующим образом.
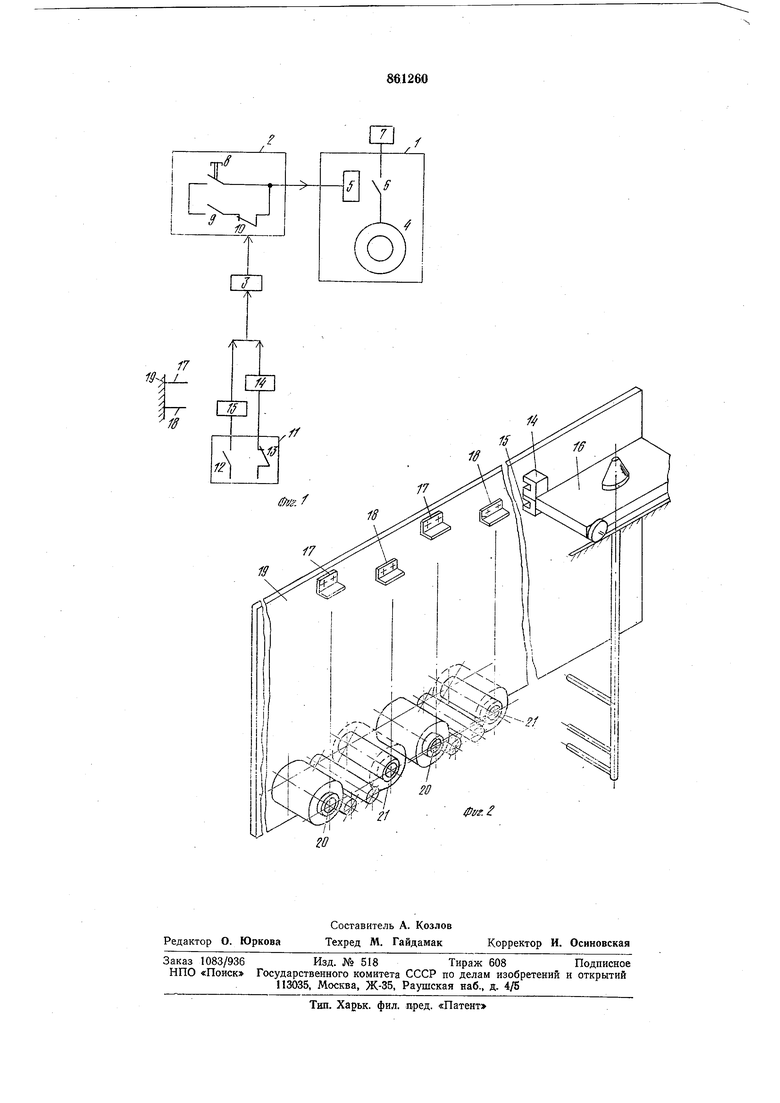
В том случае если дифференцированная заправка нити велась только на правые паковкодержатели 21 (см. фиг. 2), при перемещении манипулятора 16 вдоль фронта обслуживания приемно-намоточной части машины 19, первый датчик иоложения 14 взаимодействует с переключающими пластинами JZ левых паковкодержателей 20, а второй датчик положения 15 с переключающими пластинами 18 правых паковкодержателей 21. Поэтому блоком переключения // (см. фиг.. 1) через замыкающий контакт ,12 подключают первый датчик положения 15 и размыкающим контактом 13 отключают второй датчик положения 14.
После наработки паковок на паковкодержателях 21 манипулятор 16 приводят в движение для поочередного съема наработанных паковок.
Для этого нажимают пусковую кнопку 8, включают пускатель 5, подключая электродвигатель 4 привода манипулятора к питающей сети 7 контактами 6, при этом малипулятор 16 перемещают вдоль фронта приемно-намоточной части машины 19.
Пускатель 5 замыкает блокконтакт 9 и при взаимодействии датчика положения
15с переключающей пластиной J8, первой по ходу движения манипулятора 16, сигнал на останов поступает на согласующий элемент 3, который размыкает контакт 10.
При остановке манипулятора 16 правый паковкодержатель 21 (см. фиг. 2) оказывается расположенным соосно приемному устройству. После приема паковки для пе ремещения манипулятора 16 к следующему правому паковкодержателю 21 необходимо вновь нажать пусковую кнопку 8 (см. фиг. 1). При прохождении манипулятором
16(см. фиг. 2) левого резервного при
принятой схеме заправки паковкодержателя 20 происходит взаимодействие первого датчика положения 14 с переключающей пластиной 17.
Однако сигнал на останов не поступает, поскольку первый датчик положения 14 отключен блоком переключения Л, и ма П1пулятор / (фиг. 2) продолжает перемещение до паковкодержателя 21, следующего по ходу рабочего места.
Для съема паковок с левых паковкодержателей 20 блок, переключения // приводят Б положение, соответствующее подключению первого датчика положения 14
и отключению второго датчика положения 15.
Предлагаемое устройство позволяет исключить остановы и простои у резервных паковкодержателей и сократить количество
пусков, необходимых оператору для перемещения манипулятора вдоль фронта машины.
Формула изобретения
Устройство управления манипулятором для приема и перегрузки паковок с рабочих мест, включающее последовательно включенные датчик положения манипулятора с переключающими пластинами, блок управления и электропривод манипулятора, отличающееся тем, что, с целью повышения эффективности управления, оно содержит дополнительный датчик положеиия манипулятора, блок переключения и согласующий элемент, при этом выходы блока переключения подключены к входам обоих датчиков положения манипулятора, а их выходы через согласующий элемент
электрически связаны с входом блока управления, причем переключающие пластины размещены на разновысотных уровнях относительно рабочих мест.
Источник информации, принятый во внимание при экспертизе:
1. Патент Японии № 50-11490, кл. В 65 Н 67/02, 1975.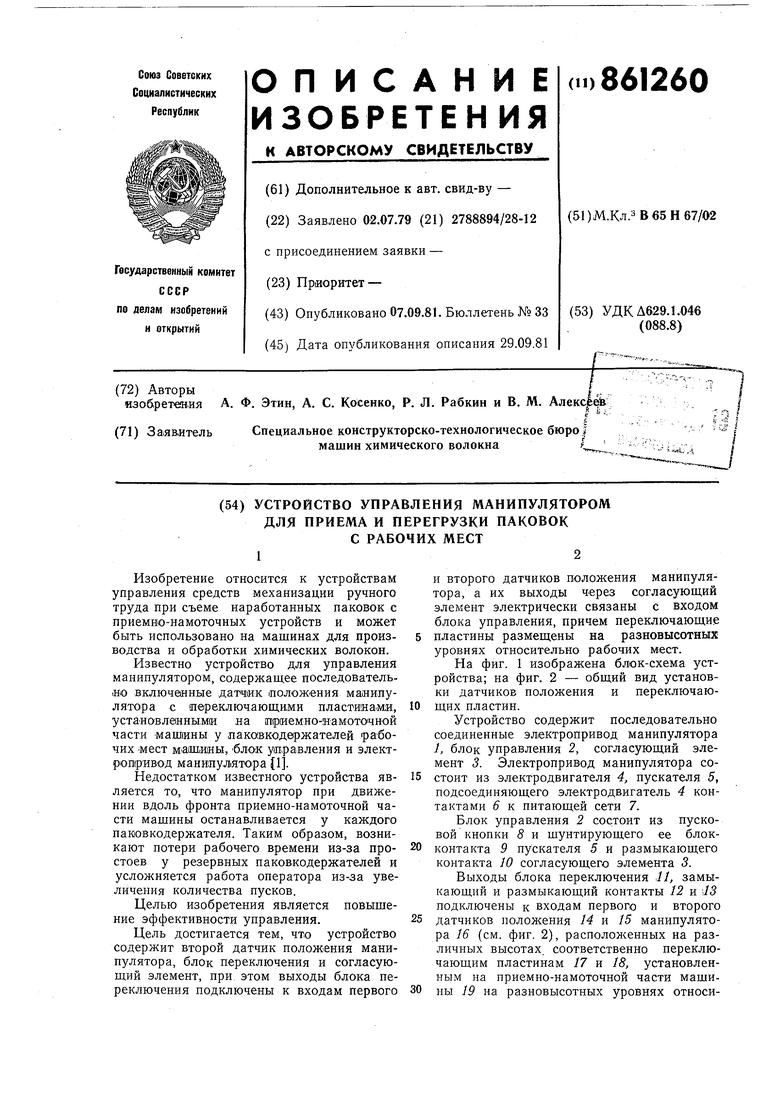
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления манипулятором для приема и перегрузки паковок | 1984 |
|
SU1222611A1 |
| Устройство для непрерывной намотки текстильных паковок | 1990 |
|
SU1784030A3 |
| Устройство управления манипулятором для съема паковок | 1988 |
|
SU1650547A1 |
| Устройство для непрерывной намотки текстильных паковок | 1989 |
|
SU1715702A1 |
| Устройство для перегрузки паковок | 1990 |
|
SU1726347A1 |
| Устройство для приема с намоточной машины и перегрузки наработанных паковок на транспортные средства | 1983 |
|
SU1105434A1 |
| Устройство для приема наработанных паковок с намоточной машины и перегрузки их на транспортные средства | 1985 |
|
SU1326531A1 |
| Устройство для перегрузки паковок и намоточных машин | 1980 |
|
SU977345A1 |
| Устройство для перегрузки паковок с намоточных машин | 1979 |
|
SU967942A1 |
| Устройство для перезаправки шпулярника сновальных машин | 1982 |
|
SU1066927A1 |