Известные подвесные конвейеры для межоперациоииого траиспортирования деталей оборудованы мехаиизмами автоматической загрузки и разгрузки, которые содержат иневмоподъемники, управляемые посредством штырей. Эти штыри установлены на тяговом органе конвейера и через рычажную систему воздействуют на воздухораспределитель иневмоподъемиика.
Также известны подвесные конвейеры, пнезлюподъемники которых загружаются деталями на участке загрузки с наклонного рольганга, оборудоваииого отсекателем для поштучной выдачи деталей.
В отличие от известных в описываемом подвесном конвейере отсекатель выполнен в виде двуплечего поворотного рычага, одно плечо которого имеет хвостовик, взаимодействующий с упорной планкой, установленной на раме пневмоиодъемника. Упором для подаваемых деталей с рольганга иа пневмоподъемиик являются оба плеча этого рычага.
Такой конвейер имеет упрошеииую конструкцию благодаря тому, что отсекатель работает без вспомогательных приводных механизмов.
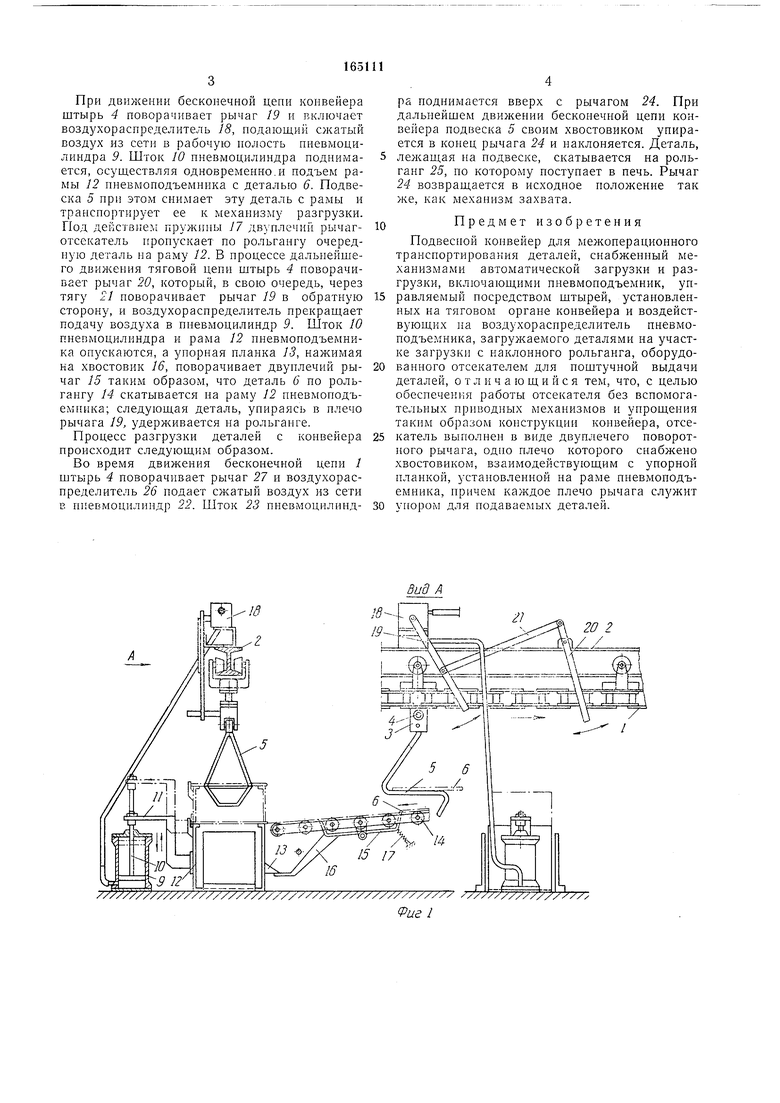
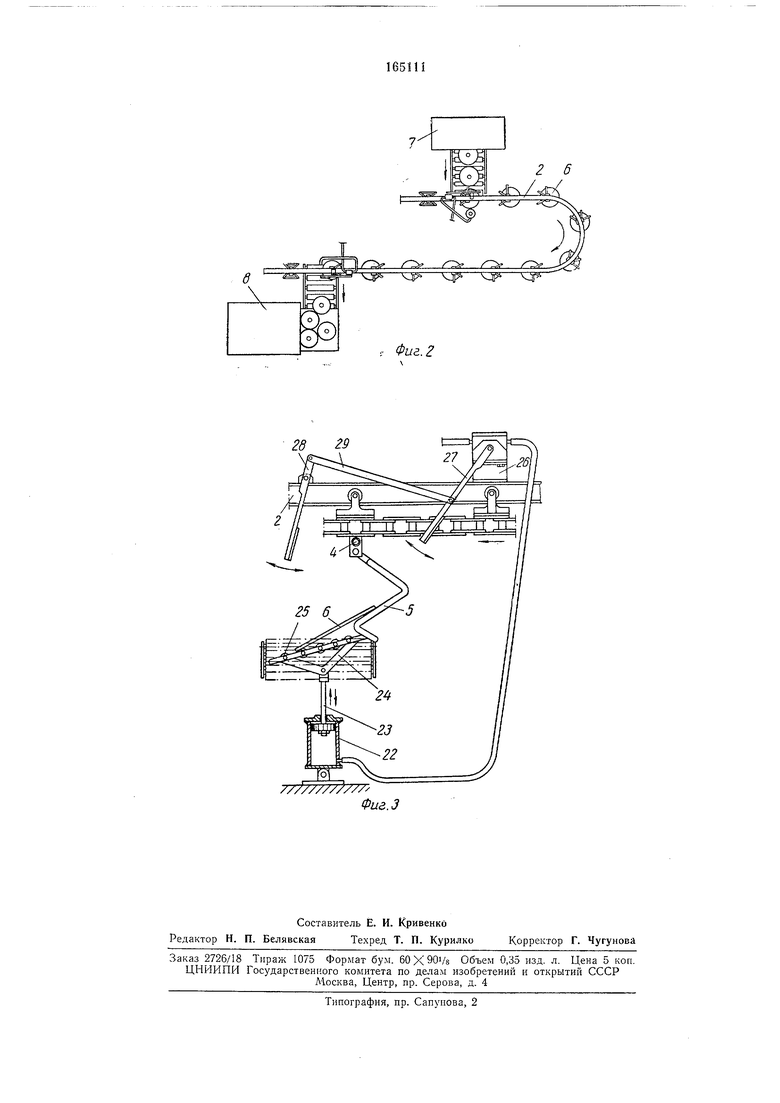
На фиг. 1 изображен механизм автоматической загрузки подвесного конвейера в двух проекциях; на фиг. 2 - подвесной конвейер; на фиг. 3 - механизм автоматической разгрузки деталей с подвесного конвейера.
На бесконечной тяговой цепи /, подвешенной на балке 2 монорельса, смонтированы башмаки 3. На них жестко закреплены штыри 4 и поворотные подвески 5, которые транспортируют детали 6 от вырубного пресса 7 к печи 8.
Механизм автоматической загрузки подвесного конвейера содержит пневмоцилиндр 9, на штоке W которого закреплен кронштейн И, связанный с рамой 12 пневд-юподъемника, имеющей упорную планку 13, и наклонный рольганг М с отсекателем для поштучной выдачи деталей. Отсекатель представляет собой двуплечий рычаг 15 с хвостовиком 16 и пружиной 17.
На балке монорельса смонтированы воздухораспределитель 18 и рычаги переключения 19 и 20 с тягой 21.
Кроме того, подвесной конвейер снабжен механизмом автоматической разгрузки деталей с конвейера. Этот механизм состоит из иневмоцилиндра 22 с поршнем, на штоке 23 которого закреплен рычаг 24, рольганга 25 и
воздухораспределителя 26 с рычагами 27 н 28 и тягой 29, расположенных на балке 2 монорельса.
Детали 6 из вырубного пресса 7 поступают на наклонный рольганг 14 и задерживаются
При движении бесконечной цепи конвейера штырь 4 поворачивает рычаг 19 и ржлючает воздухораспределитель 18, подающий сжатый воздух из сети в рабочую полость ппевмоцилиндра 9. Шток 10 пиевмоцилиндра подпинается, осуществляя одновременно.и подъем рамы 12 пневмоподъемника с деталью 6. Подвеска 5 при этом снимает эту деталь с рамы и транспортирует ее к механизму разгрузки. Под действие, пружииы П дв} плечий рычаготсекатель проиускает по рольгангу очередную деталь на раму 12. В процессе дальнейшего движения тяговой цени штырь 4 новорачивает рычаг 20, который, в свою очередь, через тягу 21 поворачивает рычаг 19 в обратную сторону, и воздухораспределитель прекращает подачу воздуха в пневмоцилнндр 9. Шток 10 пнепмоцилнндра и рама 12 нневмоподъемника опускаются, а упорная планка 13, нажимая на хвостовик 16, поворачивает двуплечий рычаг 15 таким образом, что деталь 6 по рольгангу 14 скатывается на раму 12 нневмоподъемника; следующая деталь, упираясь в плечо рычага 19, удерживается на рольганге.
Процесс разгрузки деталей с конвейера происходит следующим образом.
Во время движения бесконечной цепи / штырь 4 поворачивает рычаг 27 и воздухораспределитель 26 подает сжатый воздух из сети в пиевмоцилиндр 22. Шток 23 пневмоцилиндра поднимается вверх с рычагом 24. При дальнейшем движении бесконечной цепи конвейера подвеска 5 своим хвостовиком упирается в конец рычага 24 и наклоняется. Деталь, лежащая на подвеске, скатывается на рольганг 25, по которому поступает в печь. Рычаг 24 возвращается в исходное положение так же, как механизм захвата.
Предмет изобретения
Подвесной конвейер для межоперационного транспортирования деталей, снабженный механизмами автоматической загрузки и разгрузки, включающими иневмоподъемник, управляемый посредством щтырей, установленных на тяговом органе конвейера и воздействующих на воздухораспределитель пневлюподъемника, загружаемого деталями на участке загрузки с наклонного рольганга, оборудованного отсекателем для поштучной выдачи деталей, отличающийся тем, что, с целью обеспечения работы отсекателя без вспомогательных приводных механизмов и упрощения такнм образом конструкции конвейера, отсекатель выполнен в виде двуплечего поворотного рычага, одно плечо которого снабжено хвостовиком, взаимодействующим с упорной иланкой, установленной на раме пневмонодъемника, причем каждое плечо рычага служит упором для подаваемых деталей.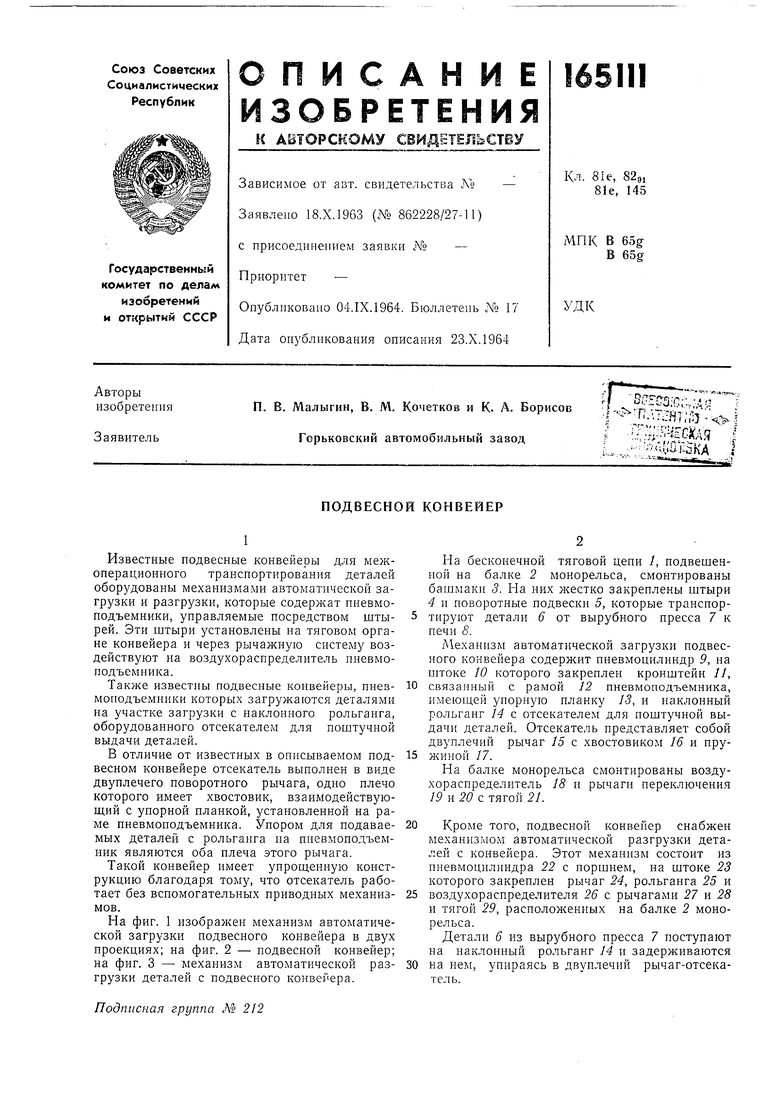
| название | год | авторы | номер документа |
|---|---|---|---|
| Поточная линия для изготовления деталей типа тел вращения | 1980 |
|
SU1016210A1 |
| Загрузочное устройство подвесного конвейера | 1975 |
|
SU580148A1 |
| Автоматическо устройство для захвата,хранения и освобождения цилиндрических изделий,транспортируемых конвейером | 1973 |
|
SU510420A1 |
| Устройство для загрузки изделий на подвесной конвейер | 1979 |
|
SU872402A1 |
| Устройство для передачи штучных грузов с одного подвесного конвейера на другой | 1975 |
|
SU607764A1 |
| Подвесной конвейер | 1979 |
|
SU772938A1 |
| Устройство для навешивания изделий на конвейер | 1985 |
|
SU1296496A1 |
| Подвесной грузонесущий конвейер | 1987 |
|
SU1433875A1 |
| Шаговый конвейер | 1982 |
|
SU1020321A1 |
| Устройство для загрузки подвесок подвесного конвейера кольцевыми деталями | 1980 |
|
SU918209A1 |
г:: /-:
3 -CF- F vg
Фиг. 2
28 29
