,1
Изобретение относится к области конвейеростроения, касается конструкции за:ррузочиых устройств подвесных конвейеров с автоматическим адресованием и может быть использовано для механизации и автоматизации логрузочных работ в любой отрасли промышленности.
Извест ны загрузочные устройства подвесных конвейеров, вклвдчагащие пнев.моцилинд.р, управляемый посредством адресоносителей и датчиков, последовательно установленных вдоль конвейера .
Недостатком известного загрузочного устройства является сложность конструкции.
Наи|более бли3 ким техническим решением к данному изобретению является загрузочное устройство подвесного конвейера, включающее установленный на участке загрузки наклонный ролыгашг с поворотной посредством иисвмоцилиидра секцией и отсекатель .груза 2.
Однако в известнол загрузочном устройстве Подвесного конвейера отсекатель груза усложнен. Он выполнен в виде ciTonoipoB: жестко установленного стопора и автоматического стошора, действующего от еспомотателышто прибора по сигналам датчиков.
С целью упрощения конструкции в и-редла1гаемо.м устройстве отсекатель вьшолнен в виде поворотного дщуплечбго рычага, одно цлечо «OTOpoiro снабжено пальцем, входяацим в продольный паз, выполненный в поворотной секции рольганга, а - упором в виде ролика.
На чертенке показано предлагаемое устройство, общий вид.
На бесконечной тяговой цепи 1, иодвешенной на двутавровой балке 2, смонтированы адреооносители 3 и подвески 4. Датчики 5 закреплены неподвижно на кронштейнах 6, смонтированных на балке 2.
Устройство содержит пневмоцилиндр 7 и наклонный рольганг 8 с отсекателем 9 груза 10. Пневмоцилиндр 7 шарнирно соединен с одной стороны с рамой неподвижной секцией 11 наклонного рольганга 8, а с другой - с поворотной секцией 12.
Отсекатель 9 представляет собой двуплечий рычаг, шариирио закрепленный иосредствОМ оси 13 на неподвижной секции 11 наклонного рольганга. Одно ллечо отсекателя снабл ено пальцам 14, а другое - (роликол 15. Поворотная секция 12 наклон-ного рольганга 8 имеет продольный лаз 16 и жесткий упор 17.
Загрузочное устройство подвесного конвейера работает следующим образом.
Груз 10 устанавливается на неподвижную секцию II на1клонно го рольгашга 8 и фиксируется роликом 15 отсекателя 9, который занимает положение, изображенное на чертеже .хпунктирОМ.
Адресоносители 3 и подвески 4 движутся вместе с бесконечной тяговой щепьто 1. При приближении пустой подвески 4 к наклонному рольтангу 8 шластина аяресоносителя 3 взаимодействует с датчиком 5 и дается сигнал на подъем поворотной секции 12. Пневмоцилиндр 7 поднимается из нижнего положения в верхнее. При этом палец 14 взаимодействует с продольным ;пазо м 16 и отсекатель 9 поворачивается против часовой стрелки вокруг оси 13. Ролик 15 опускается, груз 10 движется до жесткого упора 17 и останавливается.
При П1рохож|дении пустой лодвески 4 под inoворотной секцией il2 пластина адресоносителя 3 взаимодействует с другим датчиком 5 и дается сигнал на опускание лоъоротной секции. Пневмоцилиндр 7 опускает ее из верхнего положения IB нижнее, а ;груз 10 устанавливается на подвеску 4. При этом паяац 14 взаимодействует с продольным пазо;м 16 и отсекатель 9 по1ворачивается по часовой стрелке вокруг оси 13. Ролик il5, поднимаясь, отодввгает очередной груз 10 назад на величину своего хода и удерживает ©го в этом -положении.
Далее .цикл повторяется до тех пор, пока к наклонному рольгангу 8 не бущут подходить пустые подвески 4.
Выполнение отсекателя в виде поворотного двуплечего рычага, одно плечо которого снабжено пальцем, вхдящим в продольный лаз, выполненный в поворотной секции рольганга, а другое - упором в виде ролика, обеспечивает .работу отсекателя без вспомогательных прмводных механизмов н таким образам упрощает конструкцию загрузоч110 го уст1ройства лодвесного конвейера.
Формула изобретения
Загрузочное устройство подвесного конвейера, включающее установленный на участке загрузки наклонный рольганге поворотной посредством пневмоцилиндра секцией и отсекатель груза, отличающееся тем, что, с целью упрощения конструкции, отсекатель выполнен в виде поворотного двуплечего рычага, одно плечо которого снабжено пальцем, входящим в продольный паз, выполненный в поворотной секции рольганга, а другое - упором в виде ролика.
Источники информации, принятые во вни1мание при экспертизе
;1. Информационный листок НИИИНформтяжмаш «Автоматическое погрузочно-загрузочное устройство, № 110-73, серия 10-14.
2. Авторское свидетельство СССР № 151961, В 65G 17/20, 1949.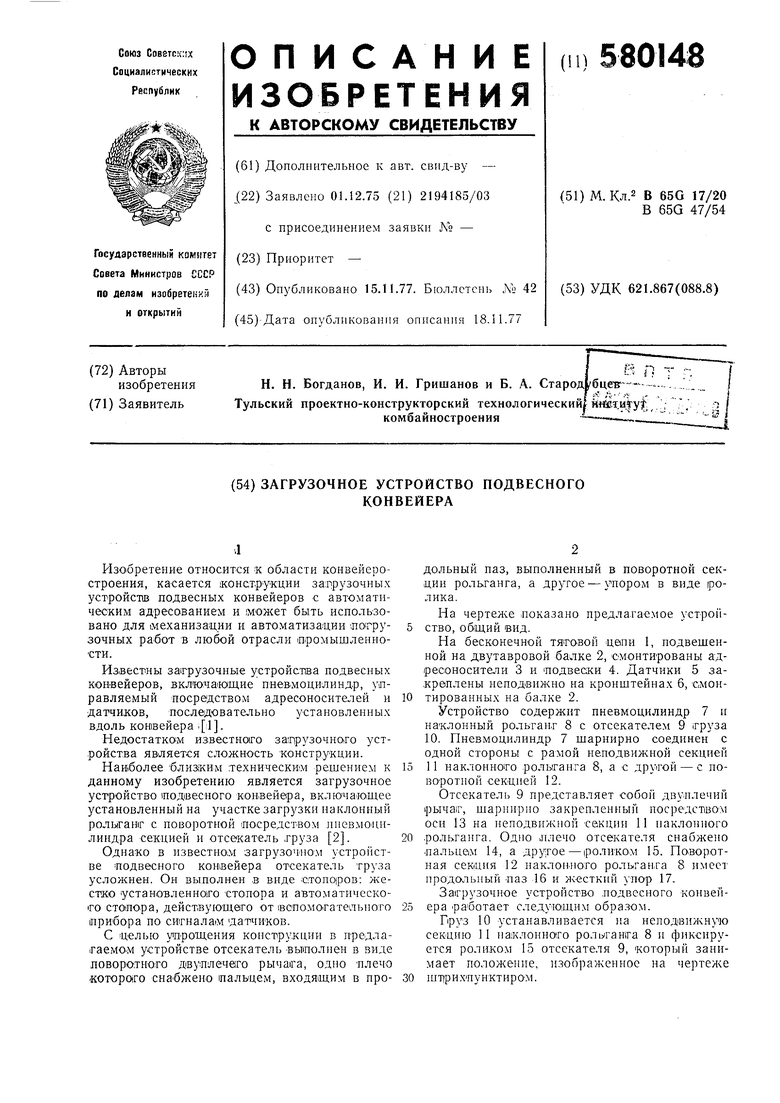

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для загрузки подвесок подвесного конвейера кольцевыми деталями | 1980 |
|
SU918209A1 |
| Поточная линия для изготовления деталей типа тел вращения | 1980 |
|
SU1016210A1 |
| ЛИНИЯ НАБОРА НОСЫЛОВ ПЕЧАТИ В ГАЗЕТНО- ЖУРНАЛЬНЫХ ЭКСПЕДИЦИЯХ | 1972 |
|
SU341540A1 |
| ПОДВЕСНОЙ КОНВЕЙЕР | 1964 |
|
SU165111A1 |
| Устройство для загрузки подвесного конвейера | 1983 |
|
SU1152894A1 |
| Транспортная система несинхронной сборочной линии спутникового типа | 1981 |
|
SU956242A1 |
| УСТРОЙСТВО для ПЕРЕДАЧИ ГРУЗОВ С ОДНОГО ПОДВЕСНОГО КОНВЕЙЕРА НА ДРУГОЙ:;.. г;тьх":-/чEf^MHv; | 1967 |
|
SU190264A1 |
| Устройство для хранения и транспортирования штучных изделий | 1978 |
|
SU745793A1 |
| Устройство для загрузки люлек подвесного конвейера | 1986 |
|
SU1426899A1 |
| Устройство для передачи штучных грузов с одного подвесного конвейера на другой | 1975 |
|
SU607764A1 |

