Изобретение относится к промышленному транспорту и предназначено для управления объектами транспортных систем, перемещающих и распределяющих грузы в определенном порядке, в частности при перегрузке на складских площадях или при обслуживании производственных процессов.
Цель изобретения - улучшение эксплуатационных характеристик путем использования для транспортных систем с оснащенными исполнительными механизмами неподвижными объектами.
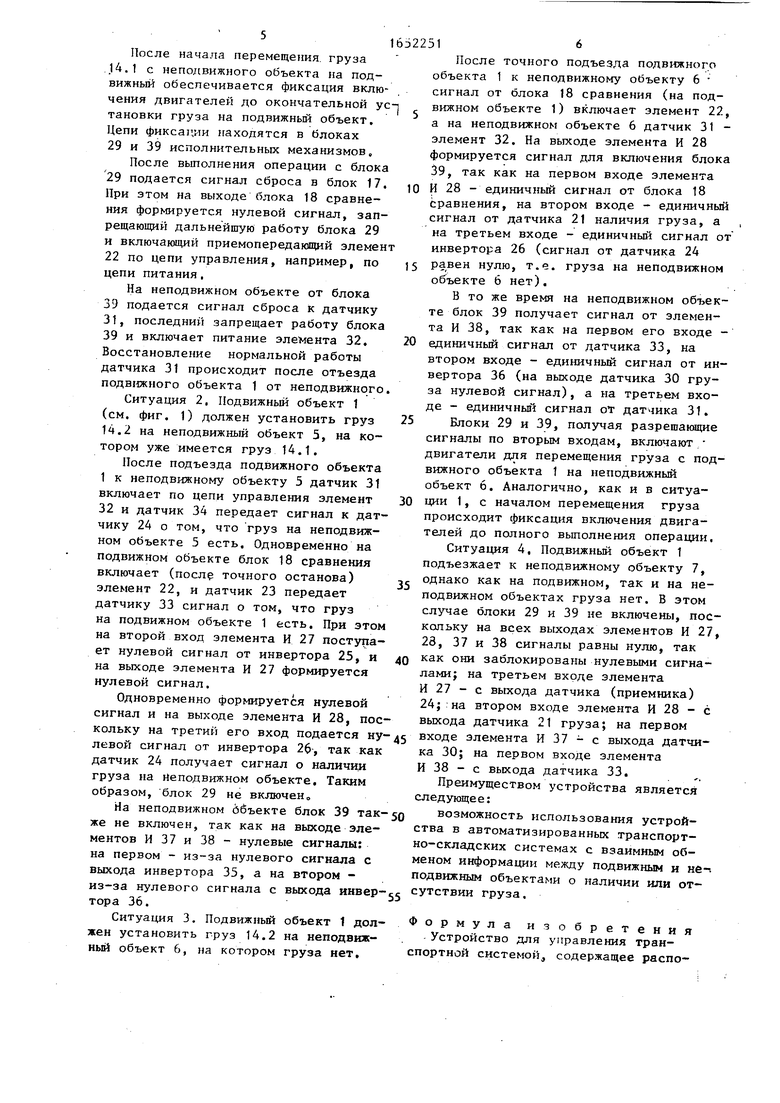
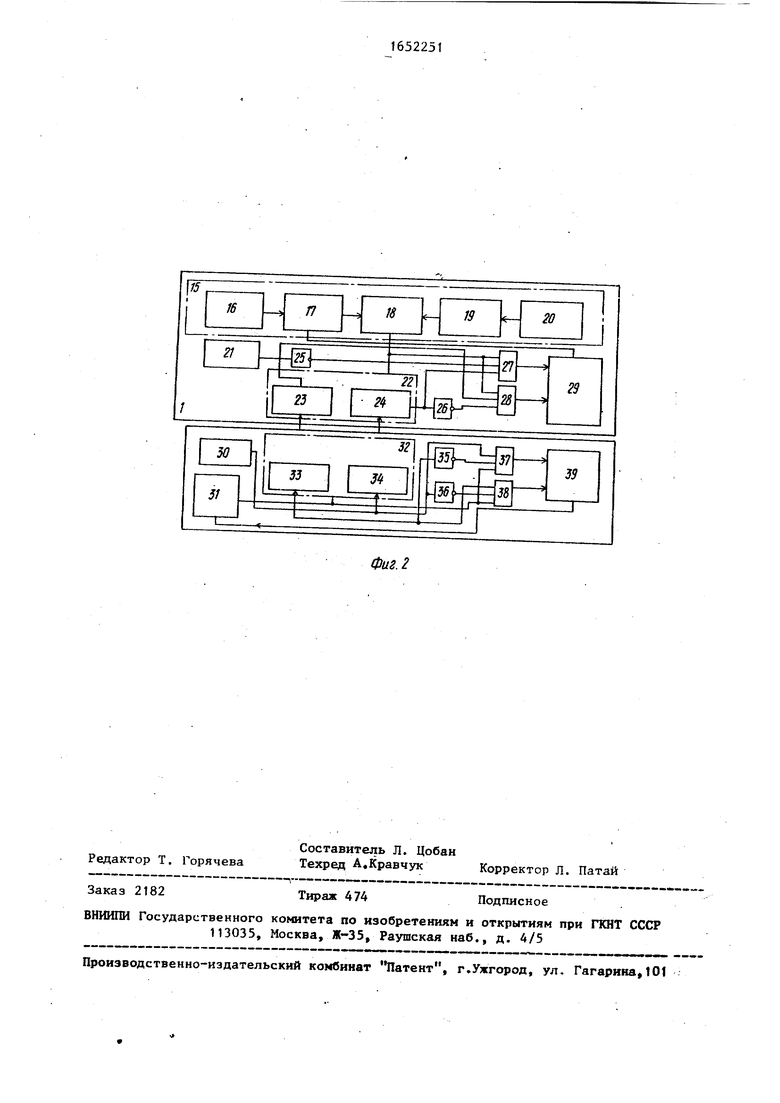
На фиг. 1 представлены объекты транспортной системы, план; на фиг.2 - блок-схема предлагаемого устройства.
В транспортной системе подвижный . объект 1, например робототележка, снабженный устройством 2 для перемещения груза, например роликовым конвейером,перемещается по трассе, определяемой индукционным кабелем 3, уложенным в полу. Вдоль трассы объекта 1 расположены неподвижные объекты 4-8, каждый из которых снабжен уст- .ройством 9-13 для перемещения груза. Объект 1 устанавливает и перемещает грузы 14.1 и 14.2 на неподвижные объекты 4-8.
На объекте 1 имеется система 15 адресования, например позиционная, которая включает блок 16 ввода информации и блок 17 памяти адреса и команд, соединенные последовательно. Выход блока 17 подключен к одному из входов блока 18 сравнения, другой вход которого соединен с блоком 19 определения положения объекта 1, соединенным с блоком 20 датчиков положения подвижного объекта. Объект 1 снабжен также датчиком 21 груза и приемопередающим элементом 22, выполненным, нап-г ример, в виде двух бесконтактных индукционных датчиков 23 и 24, первый из которых является передатчиком, а второй - приемником. На подвижном объекте установлены инверторы 25 и ю 26, элементы И 27 и 28, соединенные первыми входами с выходом блока 18, и блок 29 исполнительных механизмов. Выход датчика 21 соединен с входом инвертора 25, датчиком 23 и вторым 5 входом элемента И 28. Выход инвертора 25 соединен с вторым входом элемента И 27, Выход датчика (приемника) 24 соединен с входом инвертора 26 и с третьим входом элемента И 27. Выход 20 инвертора 26 соединен с третьим входом элемента И 28. Выход блока 18 соединен с первым входом элемента И 27 и первым входом элемента И 28, выход элемента И 27 соединен с первым вхо- 25 дом блока 29э а выход элемента И 28 - с вторым входом блока 29, один из выходов которого соединен с входом блока 17.
опи должны определять и выдавать сигнал о точном подъезде подвижного объекта к заданному неподвижному.
В исходном положении в систему 15 адресования подвижного объекта 1 вводится информация, на какой из неподвижных объектов 4-8 необходимо перенести груз 14.2 или от какого неподвижного объекта 2 взять груз 14.1.
При перемещении возможны несколько различных ситуаций, при которых устройство работает следующим образом.
Ситуация 1. Подвижный объект 1 должен взять груз 14.1 с устройства 9 для перемещения груза неподвижного объекта 4. Поскольку (см. фиг. 1) на неподвижном объекте 4 находится груз 14.1, датчик 30 груза включает датчи 34 и подает единичный сигнал на первый вход элемента И 37. Датчик 34 передает датчику 24 сигнал о наличии груза 14.1 на неподвижном объекте 4. После точного останова подвижного объекта 1 напротив неподвижного объета 4 от блока 18 сравнения на первые входы элементов И 27 и 28 поступает единичньй сигнал. Так как на подвиж
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство программного управления подвижным объектом | 1977 |
|
SU653189A1 |
| Устройство программного управления подвижным объектом | 1976 |
|
SU640926A1 |
| Устройство программного управления подвижным объектом | 1976 |
|
SU615011A1 |
| Устройство для управления конвейером | 1982 |
|
SU1082714A1 |
| Устройство для автоматического адресования движущихся объектов | 1989 |
|
SU1612316A1 |
| Устройство для адресования подвижного объекта | 1988 |
|
SU1558821A1 |
| Устройство для автоматического управления подвижным объектом | 1972 |
|
SU716944A1 |
| Микропрограммное устройство управления | 1986 |
|
SU1381506A1 |
| Устройство для двухкоординатного управления рабочим органом | 1990 |
|
SU1815620A1 |
| Устройство для охранной сигнализации | 1988 |
|
SU1603417A1 |
Изобретение относится к промышленному транспорту. Цель изобретения улучшение эксплуатационных характеристик путем использования для транспортных систем с оснащенными исполнительными механизмами неподвижными объектами. Устройство содержит на подвижном объекте систему 15 адресования, датчик 21 груза и приемопередающий элемент 22, на неподвижном - датчики 30 и 31 груза и точного останова соответственно и приемопередающий элемент 32, образующий с элементом 22 каналы связи. Наличие взаимного обмена информацией между подвижным и неподвижным объектами обеспечивает возможность использования устройства в автоматизированных транспортно-складских систе- Ј мах. 2 ил. (Л
На каждом неподвижном объекте рас-30 ном объекте 1 груза 14.1 нет, то от
35
положены датчик 30 груза, датчик 31 точного останова, приемопередающий элемент 32 с датчиком (приемником) 33 и датчиком (передатчиком) 34, инверторы 35 и 36, элементы И 37 и 38 и блок 39 исполнительных механизмов. При этом датчик 30 соединен с датчиком (передатчиком) 34, с входом инвертора 36 и первым входом элемента И 37. Датчик 31 соединен с третьим входом JQ элемента И 37 и с третьим входом элемента И 38, а датчик (приемник) 33 соединен с входом инвертора 35 и первым входом элемента И 38. Выход элемента
датчика 21 груза на вход инвертора поступает нулевой сигнал, а на его выходе единичньй сигнал, который п тупает на второй вход элемента И 2 От датчика 24 поступает единичный сигнал на третий вход элемента И 2 таким образом на выходе элемента И 27 формируется единичный сигнал, поступающий на первый вход блока 2 которьй обеспечивает включение дви телей для перемещения груза на себ В то же время датчик 33 не получае сигнала о наличии груза на подвижн объекте 1 и подает нулевой сигнал
И 35 соединен с вторым входом элемен- 45 ВХ°Д инвертора 35, а с его выхода
та И 37, а выход инвертора| 36 - с рым входом элемента И38.Выход элемента И 37 соединен с первым входом блока 39,
соединен с первым входом блока 39,
а выход элемента И 38 - с вторым входом этого блока, выходы которого соединены с датчиком 31. Датчики 34, 24, 23 и 3S образуют соответственно один и другой каналы связи, с цепями управ50
единичньй сигнал поступает на втор вход элемента И 37. На третий вход элемента И 37 поступает единичньй сигнал от датчика 31, которьй форм ет указанный сигнал только в случа точного останова подвижного объект 1 напротив неподвижного объекта ч и при соблюдении всех условий для можности передачи груза 14.1 на п вижный объект 1. Таким образом на ходе элемента И 37 формируется сиг разрешения на включение двигателей для перемещения груза 14.1 на подв ный объект 1.
пения которых связаны выходы блока 18
л датчика 31. В устройстве могут быть использованы и другие системы адресования, например счетные, телеметрические и т.д., однако в люОом случае
5
Q
датчика 21 груза на вход инвертора 25 поступает нулевой сигнал, а на его выходе единичньй сигнал, который поступает на второй вход элемента И 27. От датчика 24 поступает единичный сигнал на третий вход элемента И 27, таким образом на выходе элемента И 27 формируется единичный сигнал, поступающий на первый вход блока 29, которьй обеспечивает включение двигателей для перемещения груза на себя. В то же время датчик 33 не получает сигнала о наличии груза на подвижном объекте 1 и подает нулевой сигнал на
ВХ°Д инвертора 35, а с его выхода
единичньй сигнал поступает на второй вход элемента И 37. На третий вход элемента И 37 поступает единичньй сигнал от датчика 31, которьй формирует указанный сигнал только в случае точного останова подвижного объекта 1 напротив неподвижного объекта ч и при соблюдении всех условий для возможности передачи груза 14.1 на подвижный объект 1. Таким образом на выходе элемента И 37 формируется сигнал разрешения на включение двигателей для перемещения груза 14.1 на подвижный объект 1.
После начала перемещения груза
29 и 39 исполнительных механизмов.
После выполнения операции с блока 29 подается сигнал сброса в блок 17. При этом на выходе блока 18 сравнения формируется нулевой сигнал, запрещающий дальнейшую работу блока 29 и включающий приемопередающий элемен 22 по цепи управления, например, по цепи питания.
На неподвижном объекте от блока 39 подается сигнал сброса к датчику 31, последний запрещает работу блока 39 и включает питание элемента 32. Восстановление нормальной работы датчика 31 происходит после отъезда подвижного объекта 1 от неподвижного
Ситуация 2. Подвижный объект 1 (см. фиг. 1) должен установить груз
После подъезда подвижного объекта 1 к неподвижному объекту 5 датчик 31 включает по цепи управления элемент 32 и датчик 34 передает сигнал к датчику 24 о том, что груз на неподвижном объекте 5 есть. Одновременно на подвижном объекте блок 18 сравнения включает (после точного останова) элемент 22, и датчик 23 передает датчику 33 сигнал о том, что груз на подвижном объекте 1 есть. При этом на второй вход элемента И 27 поступает нулевой сигнал от инвертора 25, и на выходе элемента И 27 формируется нулевой сигнал.
Одновременно формируется нулевой
Ситуация 4, Подвижный объект 1 подъезжает к неподвижному объекту 7, однако как на подвижном, так и на неподвижном объектах груза нет. В этом случае блоки 29 и 39 не включены, поскольку на всех выходах элементов И 27, 23, 37 и 38 сигналы равны нулю, так как они заблокированы нулевыми сигналами; на третьем входе элемента И 27 - с выхода датчика (приемника) 24; на втором входе элемента И 28 - с выхода датчика 21 груза; на первом
сигнал и на выходе элемента И 28, поскольку на третий его вход подается ну-45 входе элемента И 37 - с выхода датчи- левой сигнал от инвертора 26, так как ка 30; на первом входе элемента датчик 24 получает сигнал о наличии груза на неподвижном объекте. Таким образом, блок 29 не включен,
На неподвижном объекте блок 39 так-50
И 38 - с выхода датчика 33.
Преимуществом устройства является следующее:
возможность использования устройства в автоматизированных транспорт- но-складских системах с взаимным обменом информации между подвижным и неподвижным объектами о наличии или отсутствии груза.
ментов И 37 и 38 - нулевые сигналы: на первом - из-за нулевого сигнала с выхода инвертора 35, а на втором - из-за нулевого сигнала с выхода инвер-сс тора 36.
Ситуация 3. Подвижный объект 1 должен установить груз 14.2 на неподвижный объект 6, на котором груза нет.
i
10
15
20
6322516
После точного подъезда подвижного объекта 1 к неподвижному объекту 6 сигнал от блока 18 сравнения (на подвижном объекте 1) включает элемент 22, а на неподвижном объекте 6 датчик 31 - элемент 32. На выходе элемента И 28 формируется сигнал для включения блока 39, так как на первом входе элемента И 28 - единичный сигнал от блока 18 сравнения, на втором входе - единичный сигнал от датчика 21 наличия груза, а на третьем входе - единичный сигнал от инвертора 26 (сигнал от датчика 24 равен нулю, т.е. груза на неподвижном объекте 6 нет).
В то же время на неподвижном объекте блок 39 получает сигнал от элемента И 38, так как на первом его входе - единичный сигнал от датчика 33, на втором входе - единичный сигнал от инвертора 36 (на выходе датчика 30 груза нулевой сигнал), а на третьем входе - единичный сигнал от датчика 31.
Блоки 29 и 39, получая разрешающие сигналы по вторым входам, включают двигатели для перемещения груза с подвижного объекта 1 на неподвижный объект 6. Аналогично, как и в ситуации 1, с началом перемещения груза происходит фиксация включения двигателей до полного выполнения операции,
Ситуация 4, Подвижный объект 1 подъезжает к неподвижному объекту 7, однако как на подвижном, так и на неподвижном объектах груза нет. В этом случае блоки 29 и 39 не включены, поскольку на всех выходах элементов И 27, 23, 37 и 38 сигналы равны нулю, так как они заблокированы нулевыми сигналами; на третьем входе элемента И 27 - с выхода датчика (приемника) 24; на втором входе элемента И 28 - с выхода датчика 21 груза; на первом
25
30
35
40
-45 входе элемента И 37 - с выхода датчи- ка 30; на первом входе элемента
входе элемента И 37 - с выхода датчи- ка 30; на первом входе элемента
И 38 - с выхода датчика 33.
Преимуществом устройства является следующее:
возможность использования устройства в автоматизированных транспорт- но-складских системах с взаимным обменом информации между подвижным и неподвижным объектами о наличии или отсутствии груза.
Формула изобретения
Устройство для управления транспортной системой, содержащее распо7165
ложенные на подвижном объекте систему адресования с блоками сравнения, памяти адреса и команд, датчик груза и анализирующий блок, включающий в себя элементы И, выходы которых соединены с блоком исполнительных механизмов, один из входов одного из них соединен с выходом одного из инверторов, а другого связан с датчиком груза, а на каждом неподвижном объек- те-датчики точного останова и груза, последний из которых соединен каналом связи с анализирующим блоком под- вижного объекта, отличающеес я тем, что, с целью улучшения , эксплуатационных характеристик путем Использования для транспортных сис- тем с оснащенными исполнительными ме
ханизмами неподвижными объектами, выходом его блока исполнительных мехаЈый неподвижный объект снабжен анализирующим блоком, включающим в себя элементы И и инверторы, и блоком ис- полни-тельных механизмов, соединенным входами с выходами элементов И ,,один из входов каждого из которых соединен с выходом датчика точного останова, второй - с выходом соответствующего Инвертора, третий вход первого из эленизмов, а выход дополнительно - с цепями управления каналов связи, дополнительно соединенными с выходом блока сравнения системы адресования под- 25 вижного объекта, блок памяти адреса и команд которой соединен с выходом блока исполнительных механизмов этого объекта.
П.2
8
ментов И - с выходом датчика груза, дополнительно соединенного с входом второго инвертора, и через канал связи, выполненный бесконтактным, с вторыми входами первого и через другой инвертор второго элементов И анализирующего блока подвижного объекта, третьи входы которых соединены с выходом блока сравнения системы адресования, при этом датчик груза на подвижном объекте соединен непосредственно с входом первого инвертора, а через дополнительный выполненный аналогично первому канал связи - с входом первого инвертора и третьим входом второго элемента И анализирующего блока неподвижного объекта, выход датчика точного останова которого соединен с
низмов, а выход дополнительно - с цепями управления каналов связи, дополнительно соединенными с выходом блока сравнения системы адресования под- вижного объекта, блок памяти адреса и команд которой соединен с выходом блока исполнительных механизмов этого объекта.
11
8
12
Фиг1
Редактор Т. Горячева
Составитель Л. Цобан
Техред А.Кравчук Корректор Л. Патаи
Заказ 2182
Тираж 474
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Подписное
| Авторское свидетельство СССР № 759437, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
