Изобретение относится к промышленному транспорту и может быть использовано для управления перемещением, например, тележек, штабелеров и т.п. на участках с фиксированными позициями останова.
Цель изобретения - повышение надежности.
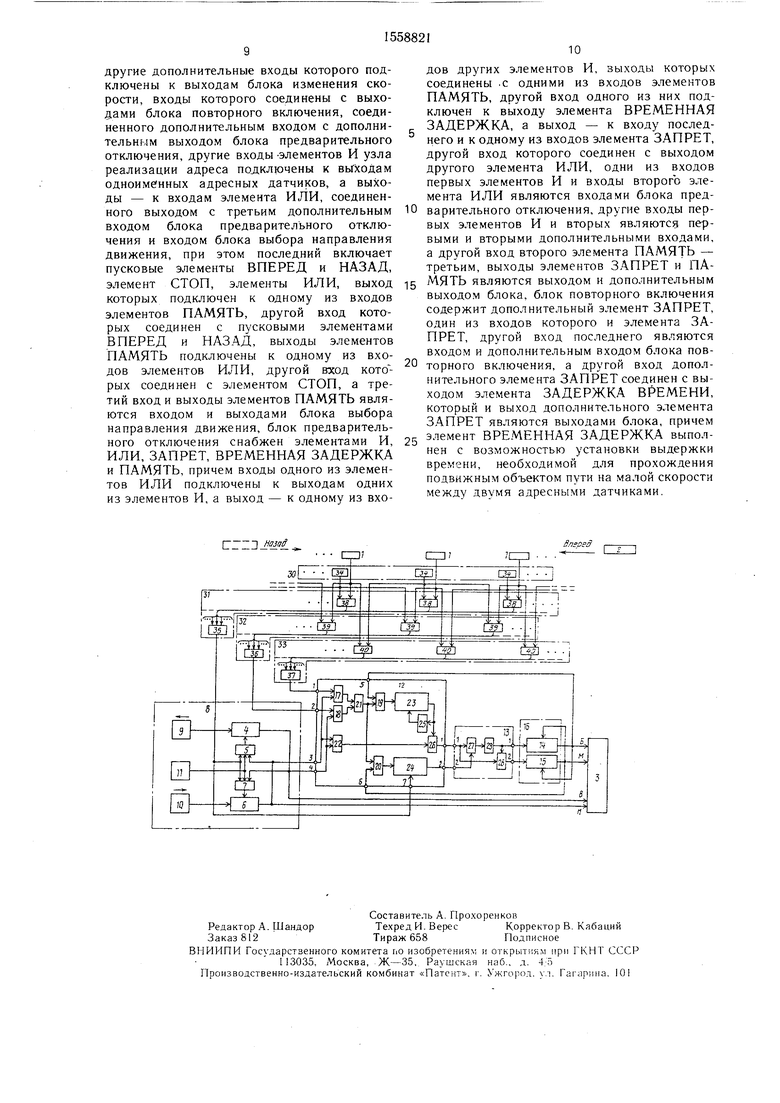
На чертеже изображена блок-схема предлагаемого устройства.
Устройство содержит адресные датчики 1 рабочих позиций и взаимодействующий с ними подвижный объект 2, блок 3 реверсивного электропривода (например, двух- скоростного асинхронного электродвигателя) , элементы память 4 команды «Вперед, ИЛИ 5, память 6 команды «Назад, ИЛИ 7, включенные в блок 8 выбора направления движения с элементами пуска 9 и 10, и останова II, блок 12 предварительного отключения, блок 13 повторного включения, узлы ускорения 14 и/замедления 15, входящие в блок 16 изменения скорости.
На чертеже показаны средняя, левая и правая адресные позиции, но их может
быть неограниченное количество как в левую, так и в правую стороны.
Блок 12 предварительного отключения состоит из элементов И 17-20, элементов ИЛИ 21 и 22, элементов ПАМЯТЬ 23 и 24, элемента ВРЕМЕННАЯ ЗАДЕРЖКА 25 на инерционный выбег подвижного объекта и элемента ЗАПРЕТ 26.
Элемент ВРЕМЕННАЯ ЗАДЕРЖКА 25 на инерционный выбег выполнен с возможностью установки выдержки времени, достаточной для снижения (гашения) большой скорости подвижного объекта до уровня малой, что позволяет исключить резкие рывки, уменьшить динамические нагрузки
10
выходов элементов ИЛИ 5,7, при этом выход элемента ИЛИ 5 соединен с нулевым входом элемента ПАМЯТЬ 4, а выход элемента ИЛИ 7 - с нулевым входом элемента ПАМЯТЬ 6 команды «Назад.
В блоке 12 предварительного отключения первый вход соединен с первым входом элемента И 17, второй вход с первым входом элемента И 18, третий вход с первым входом элемента ИЛИ 22 и вторым входом элемента И 17, четвертый вход с вторым входом элемента ИЛИ 22 и вторым входом элемента И 18, пятый вход с первым входом элемента И 19, шестой вход с первым входом
элемента И 20, седьмой вход с нулевым
привода, создать плавность движений и на-15 входом элемента ПАМЯТЬ 24, первый выход
дежность работы.с выходом элемента ЗАПРЕТ 26, второй выБлок 13 повторного включения содержитход с выходом элемента ПАМЯТЬ 24, вход
элементы ЗАПРЕТ 27 и 28 и элемент ВРЕ-которого соединен с выходом элемента И 20,
МЕННАЯ ЗАДЕРЖКА 29 на включениеа-в элементе И 19 выход соединен с входом
большой скорости привода, выполненныйэлемента ПАМЯТЬ 23 и второй вход с вторым
с возможностью установки выдержки вре-20 входом элемента И 20 и выходом элемента
мени, достаточной для прохождения подвиж-ИЛИ 21, входы которого соединены с выхоного объекта на малой скорости интер-дами элементов И 17 и 18, а также в элементе
вала пути, заключенного, например, междуЗАПРЕТ 26 запрещающий вход соединен
пройденной и заданной последующей пози-с выходом элемента ИЛИ 22, запрещающий
цией, что позволяет осуществлять плавный25 ВХ°Д соединен с выходом элемента ПАМЯТЬ
запуск и плавный останов подвижного23 и входом элемента ВРЕМЕННАЯ ЗАобъекта, независимо от массы транспорти-ДЕРЖКА 25 на инерционный выбег, выход
выходов элементов ИЛИ 5,7, при этом выход элемента ИЛИ 5 соединен с нулевым входом элемента ПАМЯТЬ 4, а выход элемента ИЛИ 7 - с нулевым входом элемента ПАМЯТЬ 6 команды «Назад.
В блоке 12 предварительного отключения первый вход соединен с первым входом элемента И 17, второй вход с первым входом элемента И 18, третий вход с первым входом элемента ИЛИ 22 и вторым входом элемента И 17, четвертый вход с вторым входом элемента ИЛИ 22 и вторым входом элемента И 18, пятый вход с первым входом элемента И 19, шестой вход с первым входом
элемента И 20, седьмой вход с нулевым
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления скоростью транспортного средства | 1982 |
|
SU1117264A1 |
| Устройство для управления перегрузочной тележкой распределительного конвейера | 1985 |
|
SU1265123A1 |
| Устройство программного управления подвижным объектом | 1976 |
|
SU640926A1 |
| Система телемеханики для циклического опроса рассредоточенных объектов | 1977 |
|
SU691912A1 |
| Устройство для адресования транспортных средств | 1987 |
|
SU1418761A1 |
| Микропроцессор | 1985 |
|
SU1330634A1 |
| Устройство программного управления подвижным объектом | 1977 |
|
SU653189A1 |
| Устройство для сопряжения электронной вычислительной машины с дискретными датчиками | 1982 |
|
SU1084774A1 |
| Система совместного управления штабелерами | 1990 |
|
SU1754595A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ БЛОКИРОВКИ ВЫХОДА ВОЗДУШНЫХ И МОРСКИХ ПОДВИЖНЫХ ОБЪЕКТОВ ЗА РАЗРЕШЕННУЮ ЗОНУ И ВХОДА ИХ В ЗАПРЕТНЫЕ ЗОНЫ | 2006 |
|
RU2321044C2 |
Изобретение относится к промышленному транспорту и может быть использовано для управления перемещением, например, тележек, штабелеров на участках с фиксированными позициями останова. Цель изобретения - повышение надежности позиционирования. Устройство содержит адресные датчики, установленные на позициях останова с возможностью взаимодействия с подвижным объектом, задатчик адреса, узлы реализации адреса, разрешения команд "Вперед" и "Назад", блоки выбора направления движения объекта, предварительного отключения, повторного включения, изменения скорости и блок реверсивного электропривода. Задатчиком адреса устанавливается требуемая позиция останова. Блок выбора направления движения объекта подает сигнал "Вперед" или "Назад" в блок реверсивного электропривода. Подвижный объект начинает перемещаться в установленном направлении к заданной адресной позиции на малой скорости. По истечении установленной выдержки времени исчезает сигнал на выходе узла замедления и появляется на выходе узла ускорения. Подвижный объект увеличивает скорость и приближается к заданной позиции. При взаимодействии с датчиком предыдущей адресной позиции отключается блок реверсивного электропривода, но объект по инерции продолжает перемещаться, плавно снижая скорость до уровня малой. По истечении заданной выдержки времени появляется сигнал на выходе узла замедления и подвижный объект на малой скорости останавливается на заданной адресной позиции. 1 ил.
руемого им груза, в результате чего всегда гарантируется высокая точность позиционирования.
Устройство также содержит задатчик 30 адреса, узел 31 реализации адреса, узел 32 разрешения команды «Вперед, узел 33 разрешения команды «Назад.
Узел 30 выполнен, например, в виде клавишного переключателя, у которого конкоторого соединен с нулевым входом элемента ПАМЯТЬ 23.
30 В блоке 13 повторного включения первый вход соединен с входами элементов ЗАПРЕТ 27 и 28, второй вход с запретным входом элемента ЗАПРЕТ 27, второй выход с выходом элемента ЗАПРЕТ 28, первый выход с запретным входом элемента ЗАПРЕТ 28
тактные группы 34 каждой клавиши имеют 35 и выходом элемента ВРЕМЕННАЯ ЗА- возможность индивидуального включения иДЕРЖКА 29, вход которого соединен с вымеханической фиксации (запоминания) ра- ходом элемента ЗАПРЕТ 27. бочего положения, а также автоматического отключения (сброса памяти) ранееВнешние соединения основных блоков включенной контактной клавишной группы. 4Q системы управления выполнены следующим
образом.
В блоке 12 предварительного отключения первый вход соединен с выходом элемента ИЛИ 37 узла 33 разрешения команды «Назади, второй вход с выходом эле- 45 мента ИЛИ 36 узла 32 разрешения команды «Назад, третий вход с выходом элемента ПАМЯТЬ 6 команды «Назад
Узел 31 реализации адреса и узлы 32 и 33 разрешения команд «Вперед, «Назад содержат соответственно по одному элементу ИЛИ 35-37 и элементы И 38-40 по количеству рабочих позиций в каждом из них.
Входы элементов ИЛИ 35-37 соединены с выходами соответствующих элементов-И 38-40, у каждого из которых первый вход соединен с выходом адресного датчика 1 соответствующей рабочей позиции,
и вторым входом элемента ИЛИ 5, четвертый вход с выходом элемента ПАМЯТЬ 4 команды «Вперед и с вторым входом элеа второй вход - с выходом задатчика 50 мента ИЛИ 7, пятый вход с выходом блока 34 адреса последующей рабочей позиции14 ускорения, запретным входом блока 15
по ходу движения подвижного объекта вперед или назад.
В блоке 8 выбора направления движения выход пускового элемента 9 соединен с входом элемента ПАМЯТЬ 4 команды «Вперед, выход пускового элемента 10 с входом элемента ПАМЯТЬ 6 команды «Назад, выход элемента 11 останова с одними из
55
замедления и входом Б (большой скорости) блока 3 реверсивного электропривода, шестой вход с выходом блока 15 замедления, запретным входом блока 14 ускорения и входом М (малой скорости) блока 3, седьмой вход с выходом элемента ИЛИ 35 узла 31 реализации адреса и третьими входами элементов ИЛИ 5,7, первый и второй выходы
которого соединен с нулевым входом элемента ПАМЯТЬ 23.
мента ИЛИ 7, пятый вход с выходом блока 14 ускорения, запретным входом блока 15
замедления и входом Б (большой скорости) блока 3 реверсивного электропривода, шестой вход с выходом блока 15 замедления, запретным входом блока 14 ускорения и входом М (малой скорости) блока 3, седьмой вход с выходом элемента ИЛИ 35 узла 31 реализации адреса и третьими входами элементов ИЛИ 5,7, первый и второй выходы
соответственно с первым и вторым входами блока 13, у которого первый выход соединен с входом блока 14 ускорения, а второй выход - с входом блока 15 замедления.
Устройство работает следующим образом.
При задании позиции останова, например при включении задатчика 34 средней адресной позиции, посылается сигнал на один из входов элемента И 38 этой же позиции узла 31 реализации адреса, а также на один из выходов элемента И 39 предыдущей позиции (в данном случае - правой) узла 32 разрешения команды «Вперед и на один из входов элемента И 40 последующей позиции (в данном случае - левой) узла 33 разрешения команды «Назад.
При включении, например, пускового элемента 9 на его выходе появляется сигнал, который устанавливает элемент ПАМЯТЬ 4 команды «Вперед в единичное
адресной позиции), и затем, не доходя до него за один интервал, сначала вступает во взаимодействие с адресным датчиком 1 предыдущей (правой) позиции, в результате чего на его выходе появляется сигнал, который поступает на второй элемент И 39 этой же (правой) позиции узла 32 разрешения команды «Вперед.
Наличие одновременно двух сигналов на входах элемента И 39 вызывает появление сигнала на его выходе, который через элемент ИЛИ 36 узла 32 поступает на второй вход блока 12 предварительного отключения и на первый вход элемента И 18. Наличие одновременно двух сигналов на вхо- 75 дах элемента И 18 вызывает появление сигнала на его входе, который через элемент ИЛИ 21 поступает на один из входов элементов И 19, 20.
Наличие одновременно двух сигналов на входах элемента И 19 вызывает появление
10
состояние и сигнал с его выхода поступает20 сигнала на его выходе, который поступает
через элемент ИЛИ 7 на нулевой вход эле-на вход элемента ПАМЯТЬ 23-и устанавмента ПАМЯТЬ б команды «Назад (предот-ливает его в единичное состояние. Сигнал
вращая одновременное включение двух про-с выхода элемента 23 поступает на вход
тивоположных команд), а также сигналэлемента ВРЕМЕННАЯ ЗАДЕРЖКА 25
поступает на вход В блока 3 электропривода25 и на запретный вход элемента ЗАПРЕТ 26,
и на четвертый вход блока 12.
В блоке 12 сигнал с четвертого входа поступает на один из входов элемента И 18, а также через элемент ИЛИ 22 и элемент ЗАПРЕТ 26 беспрепятственно постув результате чего исчезают сигналы на его выходе, на выходах блоков 12 и 13 и на входе Б блока 3.
Таким образом заблаговременно отключается привод, но подвижный объект 2 пропает на его первый выход, а затем знало- 30 должает некоторое время перемещаться
гично через элемент ЗАПРЕТ 28 блока 13 и через блок 15 замедления поступает на вход М (малой скорости) блока 3 и на запретный вход блока 14 ускорения, предотвращая одновременное включение двух реверсивных команд.
Расположенный справа на большом расстоянии от пункта назначения подвижный объект 2 начинает медленно перемещаться вперед. Одновременно в блоке 13 сигнал
по инерции, плавно снижая скорость до уровня малой.
После истечения заданной выдержки времени, достаточной для снижения большой скорости до уровня малой, на выходе эле- 35 мента 25 появляется сигнал, который поступает на нулевой вход элемента ПАМЯТЬ 23, в результате чего исчезает сигнал на его выходе и на запретном входе элемента ЗАПРЕТ 26, что приводит опять к появлечерез элемент ЗАПРЕТ 27 также поступает .,. нию сигнала на первом выходе блока 12,
на вход элемента ВРЕМЕННАЯ ЗАДЕРЖКА 25 на включение большой скорости.
После истечения заданной выдержки времени (равной, например, времени на преодоление подвижным объектом на малой скона втором выходе блока 13, на выходе блока 15 замедления и на входе М (малой скорости) блока 3 привода.
Подвижный объект 2 без рывков плавно
Подвижный объект 2 без рывков плавно
рости пути между двумя соседними рабочими 45 возобновляет принудительное движение и на
позициями (на выходе элемента 25 появляется сигнал, который поступает на запретный вход элемента ЗАПРЕТ 26, в результате чего исчезает сигнал на его выходе, на выходе блока 15, на входе М блока 3, на запретном входе блока 14 ускорения и появляется сигнал на входе блока 14 ускорения, на запретном входе блока 15 замедления, на входе Б (большой скорости) блока 3 привода и на одном из входов элемента И 19 блока 12.
Подвижный объект 2 набирает большую скорость и быстро приближается к пункту назначения (в данном случае до средней
50
малой стабильной скорости приближается к пункту назначения (к средней позиции), а затем при прибытии к нему вступает во взаимодействие с адресным датчиком этой позиции, в результате чего на его выходе мгновенно появляется сигнал, который одновременно поступает на входы элементов И 38-40 этой же позиции.
Наличие одновременно двух сигналов на входах элемента И 38 средней адрес- 55 ной позиции вызывает появление сигнала на его выходе, который через элемент ИЛИ 35 узла 31 реализации адреса поступает на седьмой вход блока 12 и на запретный вход элемента ЗАПРЕТ 24 и через элемент
адресной позиции), и затем, не доходя до него за один интервал, сначала вступает во взаимодействие с адресным датчиком 1 предыдущей (правой) позиции, в результате чего на его выходе появляется сигнал, который поступает на второй элемент И 39 этой же (правой) позиции узла 32 разрешения команды «Вперед.
Наличие одновременно двух сигналов на входах элемента И 39 вызывает появление сигнала на его выходе, который через элемент ИЛИ 36 узла 32 поступает на второй вход блока 12 предварительного отключения и на первый вход элемента И 18. Наличие одновременно двух сигналов на вхо- дах элемента И 18 вызывает появление сигнала на его входе, который через элемент ИЛИ 21 поступает на один из входов элементов И 19, 20.
Наличие одновременно двух сигналов на входах элемента И 19 вызывает появление
в результате чего исчезают сигналы на его выходе, на выходах блоков 12 и 13 и на входе Б блока 3.
Таким образом заблаговременно отключается привод, но подвижный объект 2 пропо инерции, плавно снижая скорость до уровня малой.
После истечения заданной выдержки времени, достаточной для снижения большой скорости до уровня малой, на выходе эле- мента 25 появляется сигнал, который поступает на нулевой вход элемента ПАМЯТЬ 23, в результате чего исчезает сигнал на его выходе и на запретном входе элемента ЗАПРЕТ 26, что приводит опять к появлению сигнала на первом выходе блока 12,
на втором выходе блока 13, на выходе блока 15 замедления и на входе М (малой скорости) блока 3 привода.
Подвижный объект 2 без рывков плавно
возобновляет принудительное движение и на
0
малой стабильной скорости приближается к пункту назначения (к средней позиции), а затем при прибытии к нему вступает во взаимодействие с адресным датчиком этой позиции, в результате чего на его выходе мгновенно появляется сигнал, который одновременно поступает на входы элементов И 38-40 этой же позиции.
Наличие одновременно двух сигналов на входах элемента И 38 средней адрес- 5 ной позиции вызывает появление сигнала на его выходе, который через элемент ИЛИ 35 узла 31 реализации адреса поступает на седьмой вход блока 12 и на запретный вход элемента ЗАПРЕТ 24 и через элемент
ИЛИ 5 на нулевой вход элемента ПАМЯТЬ 4 команды «Вперед, в результате чего исчезает сигнал на его выходе, на первом выходе блока 12, на втором выходе блока 13, на выходе блока 15 замедления, на входе М (малой скорости) и входе В блока 3 привода, после чего подвижный объект 2 останавливается точно в пункте назначения.
Если же подвижный объект 2 находится, например, на соседней правой позиции и его необходимо отправить на последующую среднюю позицию, при задании адреса за- датчиком 34 средней позиции и при воздействии на пусковой элемент 9 в соответствии с предложенной системой управления доставка груза в пункт назначения происходит на малой скорости, не допуская потерь времени за счет исключения в этом случае возможности включения большой скорости и паузы на инерционный выбег, так как наличие одновременно двух сигналов на входах элемента И 39 правой позиции вызывает появление сигнала на его выходе, на выходе элемента ИЛИ 36 узла 32 разрешения команды «Вперед, на выходе элемента И 18 блока 12.
Наличие одновременно двух сигналов на входах элемента И 18 вызывает появление сигнала на его выходе, который через элемент ИЛИ 21 поступает на один из входов элементов И 19,20.
Так как объект 2 перемещается на малой скорости, то на второй вход элемента И 20 также поступает сигнал.
Наличие одновременно двух сигналов на входах элемента И 20 вызывает появление сигнала на его выходе и на входе элемента ПАМЯТЬ 24 и устанавливает его в единичное состояние. Сигнал с выхода элемента 24 поступает на запретный вход элемента ЗАПРЕТ 27, предотвращающий запуск элемента ВРЕМЕННАЯ ЗАДЕРЖКА 29 на включение большой скорости, включение блока 14 ускорения и гарантирующий движение объекта 2 только на малой скорости.
Если же объект 2 находится слева(изображен штриховыми линиями) далеко от пункта назначения, при установке адреса задатчиком 34 (средней позиции) и при воздействии на пусковой элемент 10 аналогично описанному осуществляется включение элемента ПАМЯТЬ 6 команды «Назад, с выхода которого сигнал поступает на вход Н блока 3 и через элемент ИЛИ 22 и элемент ЗАПРЕТ 26 блока 12, а также через элемент ЗАПРЕТ 28 программного блока 13 и блок 15 замедления поступает на вход М (малой скорости) блока 3. Объект 2,аналогично описанному, начинает сначала медленно, а затем быстро приближаться к пункту назначения и, не доходя до него за один- интервал, вступает во взаимодействие с адресным датчиком предыдущей
(левой) по ходу движения рабочей позиции, в результате чего на его выходе появляется сигнал, который поступает на один из входов элемента И 40 этой же позиции.
Наличие одновременно двух сигналов на
входах элемента И 40 вызывает появление сигнала на его выходе, который через элемент ИЛИ 37 узла 33 разрешения команды «Назад поступает на первый вход блока 12 предварительного отключения и на один из
0 входов элемента И 17. Одновременное наличие двух сигналов на входах элемента И 17 вызывает появление сигнала на его выходе, который аналогично описанному дает команду на отключение большой скорости и, после истечения паузы на инерционный выбег, повторное включение малой скорости привода, а затем точный останов объекта 2 по адресу.
Если же по какой-либо причине выбор направления движения выполнен неправильно, подвижный объект автоматически остановится в левом или правом конечных пунктах транспортной трассы с помощью тупиковых датчиков (не показаны).
0
25
Формула изобретения
Устройство для адресования подвижного объекта, содержащее задатчик адреса, контактные элементы которого подключены к одному из входов элементов И
0 узла реализации адреса, включающего элемент ИЛИ, адресные датчики, установленные на рабочих позициях с возможностью взаимодействия с подвижным объектом, блок выбора направления движения, включающий элементы ПАМЯТЬ, подключенные выходами
5 к одним из входов блока реверсивного электропривода и к входам блока предварительного отключения, выход которого соединен с входом блока повторного включения, снабженного элементом ЗАПРЕТ,
0 соединенный последовательно с элементом ВРЕМЕННАЯ ЗАДЕРЖКА, и блок изменения скорости, выполненный в виде взаимно сблокированных узлов ускорения и замедления, соединенный выходами с другими входами блока реверсивного электропри5 вода, отличающееся тем, что, с целью повышения надежности позиционирования, оно снабжено узлами разрешения команд «Вперед и «Назад, включающими элементы И и ИЛИ, причем один из входов каждого из элементов И соединен с выходом одно именного адресного датчика, другие входы элементов И подключены к контактным элементам смежных позиций задатчика адреса, выполненного в виде клавишного переключателя с механической фиксацией, выходы элементов И подключены к входам соответствующих элементов ИЛИ, соединенных выходами с одними из дополнительных входов блока предварительного отключения,
другие дополнительные входы которого подключены к выходам блока изменения скорости, входы которого соединены с выходами блока повторного включения, соединенного дополнительным входом с дополнительным выходом блока предварительного отключения, другие входы -элементов И узла реализации адреса подключены к выходам одноименных адресных датчиков, а выходы к входам элемента ИЛИ, соединендов других элементов И, выходы которых соединены .с одними из входов элементов ПАМЯТЬ, другой вход одного из них подключен к выходу элемента ВРЕМЕННАЯ ЗАДЕРЖКА, а выход - к входу последнего и к одному из входов элемента ЗАПРЕТ, другой вход которого соединен с выходом другого элемента ИЛИ, одни из входов первых элементов И и входы второго эледы - к ьлидам ,,CMCn,a -, ,w-мента ИЛИ являются входами блока предного выходом с третьим дополнительным 10 верительного отключения, другие входы переходом блока предварительного отклю-вых элементов И и вторых являются пер- чения и входом блока выбора направлениявыми и вторыми дополнительными входами, движения при этом последний включает а другой вход второго элемента ПАМЯ )Ь - пусковые элементы ВПЕРЕД и НАЗАД, третьим, выходы элементов ЗАПРЕТ и НА- эчемент СТОП элементы ИЛИ, выход 15 МЯТЬ являются выходом и дополнительным
ГПАМЯТЬ, .LTT
БЕРНТГ НАЗ,,ЭСГГВ ПРЁт РТоДГВГРпГ,едНеЭ„Т я
5Ж ЈЕЬ
дов элементов ИЛИ, другой вход кото- „J unrn ЧПРМРНТЯ ЗАПРЕТ соединен с вырых соединен с элементом СТОП, а третий вход и выходы элементов ПАМЯТЬ являются входом и выходами блока выбора направления движения, блок предварительнительного элемента ЗАПРЕТ соединен с выходом элемента ЗАДЕРЖКА ВРЕМЕНИ, который и выход дополнительного элемента ЗАПРЕТ являются выходами блока, причем
направления движения блок предваритель- элемент ВРЕМЕННАЯ ЗАДЕРЖКА выпол- ного отключения снабжен элементами И 25 „,„„™ипгтк,п УГТЯ«П«КИ вылепжки
ИЛИ, ЗАПРЕТ, ВРЕМЕННАЯ ЗАДЕРЖКА и ПАМЯТЬ, причем входы одного из элементов ИЛИ подключены к выходам одних из элементов И, а выход - к одному из вхонен с возможностью установки выдержки времени, необходимой для прохождения подвижным объектом пути на малой скорости между двумя адресными датчиками.
C 1 J &LffЈ
„J unrn ЧПРМРНТЯ ЗАПРЕТ соединен с вынительного элемента ЗАПРЕТ соединен с выходом элемента ЗАДЕРЖКА ВРЕМЕНИ, который и выход дополнительного элемента ЗАПРЕТ являются выходами блока, причем
элемент ВРЕМЕННАЯ ЗАДЕРЖКА выпол- „,„„™ипгтк,п УГТЯ«П«КИ вылепжки
элемент ВРЕМЕННАЯ ЗАДЕРЖКА выпол- „,„„™ипгтк,п УГТЯ«П«КИ вылепжки
нен с возможностью установки выдержки времени, необходимой для прохождения подвижным объектом пути на малой скорости между двумя адресными датчиками.
| Устройство для адресования подвижных объектов | 1976 |
|
SU609693A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для управления транспортером | 1974 |
|
SU578239A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
