Изобретение относится к устройстрам управления предохранительным тормозом подъемной машины и мо/кет быть использовано в шахтных подъемниках t, других механизмах с механическим тормозным устройством, которое из условий безопасной эксплуатации должно обеспечить регулируемое предохранительное торможение.
Цель изобретения - повышение надеж ности за счет обеспечения двухступенчатого предохранительного торможения с непрерывным двухступенчатым автоматическим регулированием тормозного усилии первой ступени торможения.
На фиг. 1 изображен регулятор хранительного тормоза, общий вид; на фиг.
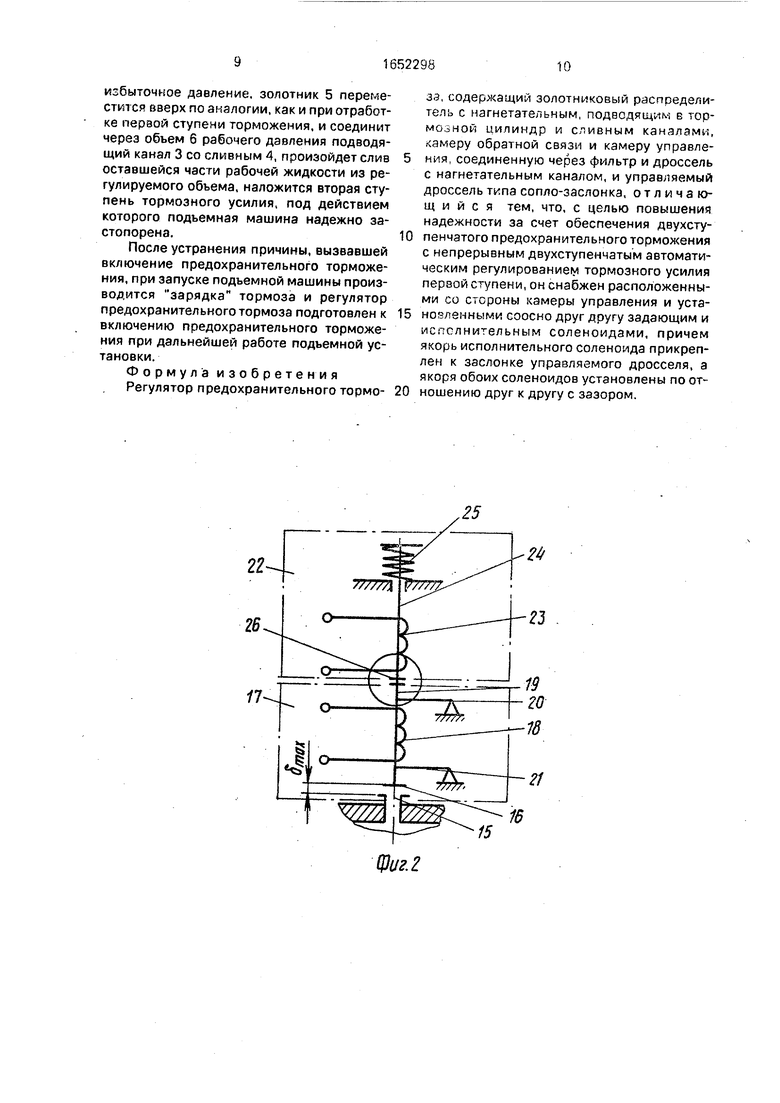
2- положение элементов обоих соленоидов в обесточенном состоянии катушек: на фиг.
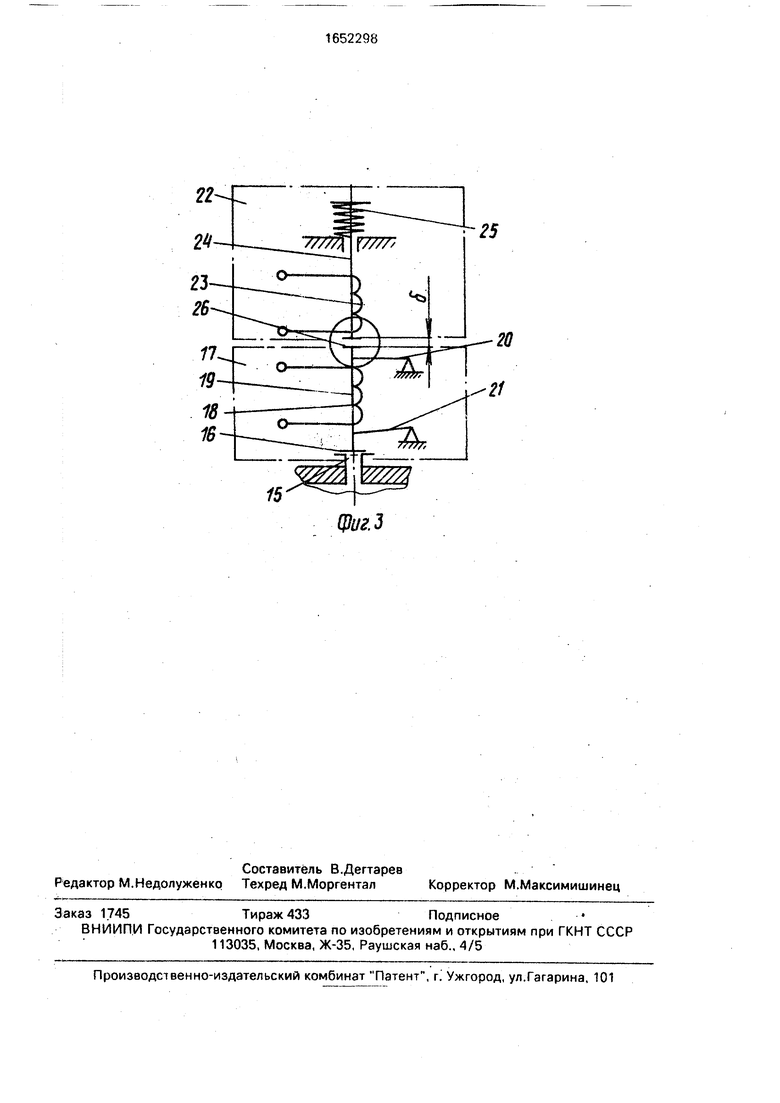
3- положение элементов соленоидов и управляемого дросселя в рабочем положении при запитанных током катушках обоих соленоидов.
Регулятор предохранительного тормоза (фиг. 1) содержит корпус 1. имеющий три канала: нагнетательный 2, подводящий 3, по которому осуществляется подвод и слив рабочей жидкости из рабочего цилиндра во время регулирования тормозного усилия, и сливной 4, двухпоясковый золотник 5, проточка которого образует объем 6 рабочего давления и имеющий канал 7, камеру 8 обратной связи по давлению, которая посредством канала 7 золотника 5 соединяется с объемом 6 рабочего давления, пружину 9, камеру 10 управления, которая посредством трубопровода 11 через жиклер 12 и фильтр 13 соединена с нагнетательным трубопроводом 14. Все эти элементы образуют трехходовой распределитель. Кроме того, регулятор предохранительного тормоза содержит сопло 15, заслонку 15, исполнительный соленоид 17, состоящий из катушки 18, якоря 19 и нагрузочных пружин 20 и 21. К штоку якоря 19 соленоида 17 подсоединена заслонка 16, задающий соленоид 22, состоящий из катушки 23, якоря 24 и пружины 25. Жиклер 12 представляет собой нерегулируемый дроссель, установленный на входе в камеру 10 управления, через который из нагнетательного трубопровода 14 по трубопроводу 11 в каперу 10 управления непрерывно поступает поток рабочей жидкости, На выходе из камеры управления 10 установлено сопло 15 с заслонкой 16. Сопло 15 и заслонка 16 образуют дроссель типа сопло-заслонка, при помощи которого осуществляется регулирование давления в камере 10 управления. Пружина 9 служит для уравноэсшивания веса золотника 5 и усилия давления, действующего на торец зопотни п 5 CD стопоны камеры 10 управления, воз- , -1каю цего и счет первоначальных гидравлических потерь при полностью открытом сопле 15, Задающий соленоид 22 установг,ен над исполнительным соленоидом 17 сс- осно, т.е. оси их якорей 19 и 24 совпадают. При установке исполнительного 17 и задающего 22 соленоидов в зоне соприкосновения 26 их якорей 19 и 24. когда они
соприкасаются друг с другом и между ними нулевой зазор, максимальный зазор дмакс. соответствующий зоне регулирования давления .IT нуля до максимального значения рабочего давления, расположен между соплом 15 и заслонкой 16 (фиг. 2). При запи- ганной током кэтушке i8 исполнительного соленоида 17 якорь 19 занимает нижнее положение, сото 15 псфокрыто заслонкой 16, а между якорями 19 и 24 в зоне их соприкосновения соотве ствует На фиг. 3 показано текущее значение зазора д при запитанной катушке 23 задающего соленоида 22 при работе подъемной установки, соответствующее промежуточному
значению тормозного момента,
Исполнительный соленоид 17 регулятора предохранительного тормоза питается постоянным по величине напряжением. Задающий соленоид 22 питается напряжением от системы управления предохранительным торможен II ем. Величина напряжения, подаваемого на катушку 23 задающего соленоида 22, всегда соответствует заданному замедлению для
выполняемого технологического режима, а следовательно, и величине усилия первой ступени торможения, которое при предохранительном торможении обеспечивает величину заданного замедления.
Регулятор предохранительного тормоза работает следующим образом.
При зарядке тормоза одновременно подается н фяжение на исполнительный 17 и задающий 22 соленоиды. При подаче
напряжения на катушку 18 исполнительного соленоида 17 исполнительный соленоид 17 развивает тяговое усилие, под действием которого его якорь 19 совместно с заслонкой 16 перемещаются вниз на величину за0 зора (Змагс и полностью перекроет сопло 15 заслс, 16, при этом нагружаются пружины 20 о 21. При полном перекрытии сопла 15 заслонкой 16 в камере управления 10 устанавливается наибольшее рабочее дав5 ление, такое же по величине как и в нагнетательном трубопроводе 14 В сйязи с тем, что канал 3 перекрыт электроклапаном включения предохранительного торможения (не показан) и в камере 10 управления в
результате мер к; м тиь оопла 15 заслонкой 16 устанавливается наибольшее ргбг. лчзление, то под ДЙЙС.РИ---1 /силия даило- кия, действующего на тогоц з лсгника ;i -) стороны камеры 10 упрадлент, золотник G переместится вьи, р резут -яте чегосоед i нится нагнетательный канал 2 с объемом С рабочего давления. При этом повысится давление в объеме 6 рабочего давления, ч крнэле 3 и в камере обратной связи 8, так как объем 6 раоог;С о давления и камера Ъ обратной связи соединена между собой посредством канэла 7. При выравнивании давления в камерах управления 10 и обратной свяли 8 золотник 5 займет среднее нейтральное положение При т--;:ом распо п ;е нии золотника 5 между ьоСой разобщен.л все три канала; нагнем гол LIH Ъ под вод,ЩИЙ 3 И СЛИВНОЙ I.
Так как заслонка 16 --лностью перекрывает сопло 15, то чериз камеру Юупрчг ления будет нулевой расход готокл. управления и в ней установится наибольшее рабочее давление.
Все элементы распределителя и исполнительного соленоида 17 пах дягся п положении на протяжение всего времен;.. работы подъемной устан -тки.
При зарядке тормоза ,; о юних подъемного двигателя на клту.ику 23 соленоида 22 подается дежурное ннг; ЙУ.ОПЧР
При подаче дежурного напряжения нп катушку 23 соленоида 22 якорь 24 не пере мещ«ется вниз, так как магнитное vcn/гля, развиваемое задающим соленоидом 22, но значительно и между торцами якорей 19 и 24 в зоне их соприкосновения 26 в peiy/u тате перемещения якоря 19 вниз установи ся наибольший зазор oV ..,При включении доигэтеля в зж) сти эт выбранного режима подъем ной установки система ум предохранительным тормг. м ием лг ома- тически вырабатывает сигнаг, пидг .шря ж е н и я. соответствующего требуемой величине замедления, выполняемого технологического режима, т.е. соответствующее усилию первой ступени торможения. Эч; напряжение подается на к,-;ушку 23 задающего соленоида 22, в ре;1. льтлти чс-io под действием магнитного усилия, развив..-ъмо- го задающим соленоидом 2 onj пкорь 2А. нагружав пружину 25, .;.-,;гитг.м пшчз и между якорями ri и 24 и ::,t их conpiiKt::;- новения 26 установитсязлзср соотпегс; чующий заданно величино усилия г.прр.ои ступени торможения, таким обрл.г .м .-: ) мировям сигнал на / парной стyri ни торможения ( ьиг /).
11ри орбоге подъемной устзнстзкм когда выполняется заданный режим, и на прогя- V.CCM i Ероме.-ш подъемного цикла статиче- -. .. мп :ент не изменяется, кагушка 23
5 а.г:к. t .ir.i о соленоида 22 находится под напр ... кием постоянным по величине, т.е. Зг, между якорями 19 и 24 исполнительного 17 и .г)дяющего 22 соленоидов в зоне их соприкосновения 26 будет постоянным
0 пс чоличине. В случае, если при выполнении з;.;;.. иного режима на моотнжении времени |.с,ьемно 5 цикл. статический момент из- int:1 ivrr..я. -ci длг :Юс:..печения заданной ве- лкчи-г -1 .| eHiiq система управления,
5 прел pLj:i;. iTe;tbHbiM торможением эвтома- тич , ;i зноен; корректировку в величину . ,х;ения. подаваемого на оЬмотку 23 за- ддющего соленоида 24, в результате чего меж;:/ якорями 19 и 24 исголнительного 17
j Р задающего 22 соленоидов в зоне их сопри- косног.ония 26 всегда установлен зазор д,
ГОГ;Т К ТСТВУЮЩИ(- УСИЛИЮ ПврЗОЙ СТуПСНИ
;ормсжзния.
:;гулятор в период предохранительно- 5 го торможения работает следующим обра- - Ппи цепи защиты обесточива(.(я только KaTyujKa 18 исполнительного солеио. дз i катуиика 23 задающего
: гплпиоидг- 92 продг лжает оставаться под
1 г п;;я; -: -нием nccryr,c OUUiM от ;:1стемы уп0.: ения кр здохрли гельным торможением При оПесто исании катушки 18 якорь 19 с )Ч -1Р.; но с заслонкой 16 под действием
1 ч оуочных 20 и 21 переместится пг-.р. цс пора в якорь 24 задающего соле- ноида 22 ч рсзульта ;е чего между соплом 15
1заолонкой 16 установится зазор д. при :: гм /- иление в камере 10 упраеления по0 ; -ui- r-« ,:о величины, соответствующей п г-::. п и торможения. При пониже- н ч1 / ,; 1; -.;:.ия в камере Н) управления также .. i г,.5..ся и усилие давления, действующее м . верхний горец золотника 5 так как в
камере Г обратной связи наибольшее рабо- ч.:} длпленче. то под действием избыточного усилия давления, действующего на нижний тссчщ зо л о ника 5 со стороны каме- PI..I В оСрлной связи, золотник 5 перемеС иг:. оверх и через обьем рабочего Я,; i ,i б со диниг канал 3 со сливным г..: .. гo.v: 4. а результате чего произойдет ..i. г. жидкости из регулируемого о1 : м-- По мере отработки первой ступени
i с pMtj ения в регулируемом обьемо (не по- ко ..ан ., следовательно, и в объеме 6 рабо- 4(r;i /nfi. ir- ния и кам-jpe 8 обратной связи ,кД.::ся ,|Л;:лон; .. П(:.- выравнивании дан::--н г-; в Л - 1:; е 10 упиав И.мтя и камере
8 обратной связи золотник 5 переменился в нейтральное положение, npi этом подводный канал 3 разобщен со сливн; ,м каналом 4, что свидетельствует об отработке первой ступени торможения, т.е. слив рабочей жидкости из регулируемого объемл прекратится.
Если в период выполнения предохранительного торможения фактическое замедление отклоняется от заданного, то система управления автоматически внесет корректировку в величину сигнала на отработку первой ступени торможения путем изменения величины напряжения, подаваемого на катушку 23 задающего соленоида 22. Ттк как катушка 18 исполнительного соленоида 17 обесточена и якоря 19 и 24 обоих соленоидов находятся в соприкоснопении, то прч изменении напряжения, подаваемого на кэ- тушку 23, якоря перемещаются как единый сборочный элемент.
При необходимости понижения усилия первой ступени торможения напряженно, подаваемое на катушку 23 задающего соленоида 22,увеличивается на вепичину,соответствующую изменению усилия перьсн ступени торможения, и наоборот, при необходимости увеличения усилия первой ступени торможения напряжение снижается на соответствующую величину.
При увеличении напряжения, подаваемого на катушку 3 задающего соленоида 22, якоря 24 и 19 совместно с заслонкой 16 под действием магнитного усилия, нагружая пружины 25, 21 и 20, переместятся вниз, при этом уменьшится зазор б между соплом 15 и заслонкой 16, в камере 10 управления повысится давление, увеличивается также и усилие, действующее на верхний торец золотника 5. Золотник 5 под дейс гви- ем этого усилия переместится вниз и соединит через обьем 6 рабочего давления канал 3 с нагнетательным каналом 2, произойдет впуск рабочей жидкости в регулируемый обьем, в результате чего в нем повысится давление, а усилие первой ступени торможения уменишится. При отработке команды, когда давление в камере обратно, связи 8 сравняется с давлением в камере 1C управления, золотник 5 займет среднее нейтральное положение, при котором нагнетательные 2 и подводящий 3 каналы разобщены и подача рабочей жидкости о регулируемый обьем прекратится ;1ри необходимости увеличения тормозного усилия первой ступени торможения напряжение, подаваемое на катушку 23 соленоида 22, понижается на величину соответствующую изменению усилия перчой ступени
При г снижении напряжения, подаваемого чз катушку 23 задающего соленоида 2, пэд действием пружин 25, 21 и 20 якоря 24 и 19 ебоих соленоидов совместно с засгонкой 16 переместятся вверх, при этом зазор д между соплом 15 и заслонкой увеличится, в камере 10 управления давление понизится, уменьшится также и усилие давления, действующее на верхний торец зо0 потника 5, золотник 5 под действием избыточного УСИЛИЯ давления, действующего на нижний торец золотника 5 со стороны : дмеры 8 упраьления, переместится вверх и соединит чеоез обьем 6 рабочего давления
5 канал 3 со сливным 4, произойдет частичный сыхлоп рабочего тела из регулируемого объема, ч результате чего в нем понизится давление, а усилие первой ступени торможения увеличится. При отработке команды,
0 когдн давление в обеих камерах 10 и 8 сравняется, зологник 5 займет свое среднее нейтральное положение, при котором каналы сливной 4 и подводящий 3 разобщены и спив рабочей жидкости из регулируемого
5 обьема прекратится
Следовательно, как автоматическое задание и формирование сигнала на отработку величины усилия первой ступени ГОГ МОЖРЧИЯ, -ок и непрерывное внесение
0 оррекгир- г неличину сигнала на ее отработку на протяжении времени подъемного цикла, а также и в период выполнения предохранительного торможения свидетельствует о том, что регулятор предохрани5 гельного тормоза обеспечивает непрерывное регулирование величины первой ступени торможения, причем глубина регупировзния усилия первой ступени торможения происходит в диапазоне от нуля до
0 наиЬольшего ее значения, соответствующего наибольшему тормозному моменту.
Вторая ступень торможения, соответствующая наибольшему тормозному моменту н-1кгядг,вэеи - а конце периода предохра5 нитепьного торможения, когда скорость движения подъемных сосудов равна или близка нулю, т.е. продолжительность технологической паузы задается системой управ- iciinq предохранительным торможением.
0 Для наложения второй ступени торможения обес гомисае ся ка гушка 23 задающег о солено-да , а результате чего якоря 19 и 24 солено 1/,,)в 17 и 22, находящиеся в соприкосновении друг с другом, под действием
5 нагрузочн лх пружин 20 и 21 и пружины 25 переместятся вверх при этом меж ду соплом 15 и зчслонкои 16(фиг 2)усттновится наибольший зазор равный д, в камере 10 управ- пения установится практически нулевое
избыточное давление, золотник 5 переместится вверх по аналогии, как и приотрэГют- ке перзой ступени торможения, и соединит через объем 6 рабочего давления подводящий канал 3 со сливным А, произойдет слив оставшейся части рабочей жидкости из регулируемого объема, належится вторая ступень тормозного усилия, под действием которого подъемная машина надежно застопорена.
После устранения причины, вызвавшей включение предохранительного торможения, при запуске подъемной машины производится зарядка тормоза и регулятор предохранительного тормоза подготовлен к включению предохранительного торможения при дальнейшей работе подъемной установки.
Формула изобретения Регулятор предохранительного тормо-
зз, содержащий золотниковый распределитель с нагнетательным подводящие в юо- иипиндр и сбивным каналами, клмеру обратной связи и камеру управления соединенную через фильтр и дроссель с нагнетательным каналом, и управляемый дроссель ri na сопло-заслонкэ, отличающийся тем, что, с целью повышения надежности за счет обеспечения двухступенчатого предохранительного торможения с непрерывным двухступенчатым автоматическим регулированием тормозного усилия первой ступени, он снабжен расположенными со с.сроны камеры управления и уста- но енными соосно друг другу задающим и исполнительным соленоидами, причем якорь исполнительного соленоида прикреплен к заслонке управляемого дросселя, а якоря обоих соленоидов установлены по отношению друг к другу с зазором.
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор для предохранительного тормоза | 1990 |
|
SU1720978A1 |
| Регулятор давления | 1990 |
|
SU1714581A1 |
| Устройство для управления предохранительным тормозом подъемной машины | 1987 |
|
SU1442494A1 |
| Электрогидравлический регулятор давления | 1985 |
|
SU1327075A1 |
| Устройство для управления тормозом подъемной машины | 1985 |
|
SU1312044A1 |
| Устройство для управления предохранительным тормозом подъемной машины | 1989 |
|
SU1636316A1 |
| Электрогидравлический регулятор давления | 1988 |
|
SU1621004A1 |
| Устройство для управления приводом шахтных подъемных машин | 1972 |
|
SU643412A1 |
| Электропневматический регулятор давления | 1986 |
|
SU1332277A1 |
| Устройство управления предохранительным тормозом подъемной машины | 1984 |
|
SU1549891A2 |
Изобретение относится к устройствам управления предохранительным тормозом подъемной машины и может быть использовано в шахтных подъемниках и других меха- низмах с механическим тормозным устройством, которое из условий безопасности эксплуатации должно обеспечить регулируемое предохранительное торможение. Цель изобретения - повышение надежности за счет двухступенчатого предохранительного торможения с непрерывным двухступенчатым автоматическим регулированием тормозного усилия первой ступени. Регулятор предохранительного тормоза состоит из корпуса 1, золотника 5. камеры 8 обратной связи, камеры 10 управления, на входе которой установлен жиклер 12. а на выходе - управляемый дроссель, состоящий из сопла 15 и заслонки 16. Исполнительный 17 и задающий 22 соленоиды установлены друг над другом с зазором и соосно с соплом 15, причем соленоид 22 установлен над соленоидом 17, к якорю которого прикреплена заслонка 16. Зазор между якорями образует зону 26 соприкосновения, в которой происходит непрерывное формирование команды на отработку первой ступени торможения. 3 ил. & 26 О сл го ю чэ со 14 / Фиг1
21
15
16
Щи г. 2
15
фиг.З
| Бежок В.Р | |||
| и др | |||
| Руководство по ревизии, наладке и испытанию шахтных подьем- ных машин | |||
| М.: Недра, 1982, с | |||
| Гудок | 1921 |
|
SU255A1 |
