Ki, K2 коэффициенты пропорциональности, формируют сигнал задания нагрузки привода. Сравнивают сформированную величину Рэад нагрузки с текущей нагрузкой Р и пропорционально величине рассогласования изменяют частоту ПБ вращения барабана, при этом частоты вращения барабана поддерживается в интервале
Пмин ПБ Юмакс .
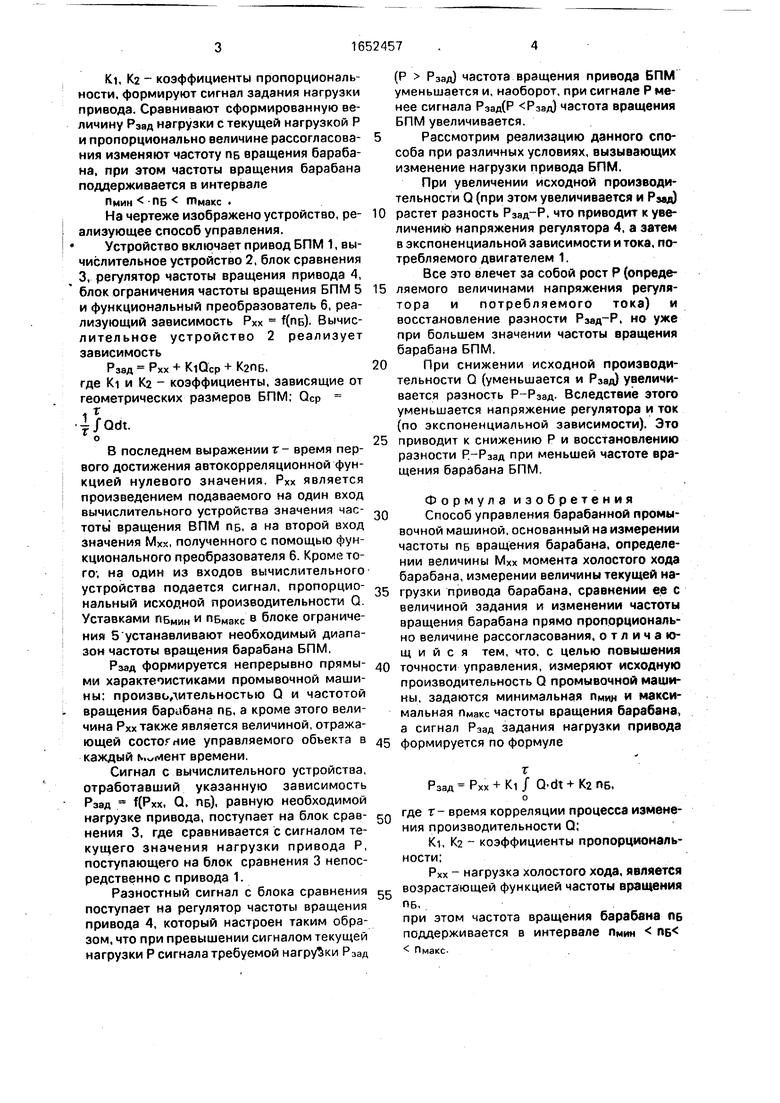
На чертеже изображено устройство, реализующее способ управления.
Устройство включает привод БПМ 1, вычислительное устройство 2, блок сравнения 3, регулятор частоты вращения привода 4, блок ограничения частоты вращения БПМ 5 и функциональный преобразователь 6, реализующий зависимость Рхх f(n&). Вычислительное устройство 2 реализует зависимость
Рэад Рхх + KiQcp + Kane, где Ki и Кг - коэффициенты, зависящие от геометрических размеров БПМ; QCp
4/Qdt.
о
В последнем выражении г- время первого достижения автокорреляционной функцией нулевого значения. РХх является произведением подаваемого на один вход вычислительного устройства значения частоты вращения ВПМ ПБ, а на второй вход значения Мхх. полученного с помощью функционального преобразователя 6. Кроме то го; на один из входов вычислительного устройства подается сигнал, пропорциональный исходной производительности Q. Уставками ПБМИН и Бмакс в блоке ограничения 5 устанавливают необходимый диапазон частоты вращения барабана БПМ.
Рзад формируется непрерывно прямыми характеоистиками промывочной машины: произволительностью Q и частотой вращения барабана ПБ, а кроме этого величина РХХ также является величиной, отражающей состогние управляемого объекта в каждый к.мент времени.
Сигнал с вычислительного устройства, отработавший указанную зависимость Рэад f(Pxx, Q. ПБ), равную необходимой нагрузке привода, поступает на блок сравнения 3, где сравнивается с сигналом текущего значения нагрузки привода Р, поступающего на блок сравнения 3 непосредственно с привода 1.
Разностный сигнал с блока сравнения поступает на регулятор частоты вращения привода 4, который настроен таким образом, что при превышении сигналом текущей нагрузки Р сигнала требуемой нагрузки Р3ад
(Р Рзад) частота вращения привода БПМ уменьшается и, наоборот, при сигнале Р менее сигнала Рзад(Р Рзад) частота вращения БПМ увеличивается.
Рассмотрим реализацию данного способа при различных условиях, вызывающих изменение нагрузки привода БПМ,
При увеличении исходной производительности Q (при этом увеличивается и Рэад)
растет разность Рээд-Р. что приводит к увеличению напряжения регулятора 4, а затем в экспоненциальной зависимости и тока, потребляемого двигателем 1.
Все это влечет за собой рост Р (определяемого величинами напряжения регулятора и потребляемого тока) и восстановление разности Рзад-Р, но уже при большем значении частоты вращения барабана БПМ.
При снижении исходной производительности Q (уменьшается и Рзад) увеличивается разность Р-Рэад. Вследствие этого уменьшается напряжение регулятора и ток (по экспоненциальной зависимости). Это
приводит к снижению Р и восстановлению разности Р-Рэад при меньшей частоте вращения барабана БПМ.
Формула изобретения
Способ управления барабанной промывочной машиной, основанный на измерении частоты ПБ вращения барабана, определении величины Мхх момента холостого хода барабана, измерении величины текущей нагрузки привода барабана, сравнении ее с величиной задания и изменении частоты вращения барабана прямо пропорционально величине рассогласования, отличающийся тем, что, с целью повышения
точности управления, измеряют исходную производительность Q промывочной машины, задаются минимальная пМцц и максимальная Пмакс частоты вращения барабана, а сигнал РЭад задания нагрузки привода
формируется по формуле
Рзад Рхх + Ki j Q-dt + К2 ПБ,
о
где г- время корреляции процесса изменения производительности Q;
Ki, K2 - коэффициенты пропорциональности;
Рхх - нагрузка холостого хода, является возрастающей функцией частоты вращения ПБ,
при этом частота вращения барабана ПБ поддерживается в интервале пмим ПБ
Пмакс
Q
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления барабанной промывочной машиной | 1990 |
|
SU1719556A1 |
| Способ управления зазором искрового промежутка при электроэрозионной обработке | 1991 |
|
SU1776505A1 |
| Способ управления скруббером | 1979 |
|
SU863783A1 |
| Способ изготовления отливок | 1990 |
|
SU1780921A1 |
| Устройство автоматического управления процессом дробления сырья в конусной дробилке | 1989 |
|
SU1688919A1 |
| Способ определения силы резания | 1991 |
|
SU1814975A1 |
| Способ автоматического управления работой дробильно-перегрузочного комплекса | 1987 |
|
SU1470339A1 |
| Устройство для адаптивного управления станком | 1987 |
|
SU1618584A1 |
| Способ контроля грузонесущей способности ленточного конвейера | 1989 |
|
SU1685834A1 |
| Способ автоматического управления процессом эпоксидирования пропилена гидроперекисью этилбензола | 1990 |
|
SU1797604A3 |
Изобретение относится к управлению барабанными промывочными машинами, предназначенными для промывки руд россыпных месторождений и нерудных строительных материалов. Цель изобретения Изобретение относится к упрвлению ба- рабанными промывочными машинами (БПМ), предназначенными для промывки руд россыпных месторождений и нерудных строительных материалов. Цель изобретения - повышение точности управления. Сущность способа заключается в следующем. В процессе управления измеряют частоту ПБ вращения барабана промывочной машины, исходную производительность Q повышение точности управления В процессе управления измеряют частоту ПБ вращения барабана промывочной машины, исходную производительность Q промывочной машины и величину Р текущей нагрузки привода барабана. Определяют величину Мхх момента холостого хода. Задают минимальную Пнин и максимальную пМакс скорости вращения барабана. По формуле г зад Рхх + Ki / Qdt + Кз nt. где Рхх нагрузка холостого хода , являющаяся возрастающей функцией частоты вращения ПБ; г - время корреляции процесса изменения производительности Q; Ki, K2 - коэффициенты пропорциональности, формирующие сигнал задания нагрузки привода, сравнивают сформированную величину Р3ад нагрузки с текущей нагрузкой Р и пропорционально величине рассогласования изменяют частоту вращения барабана. При этом скорость вращения барабана ПБ поддерживается в интервале пмин ПБ Пмакс. 1 ИЛ промывочной машины и величину текущей нагрузки Р привода барабана. Определяют величину момента холостого хода. Задают минимальную пмин и максимальную Пмакс частоты вращения баоабана. По формуле г + К1/Qdt+fcflB. о где Рхх - нагрузка холостого хода, является возрастающей функцией частоты вращения ПБ; г- время корреляции процесса изменения производительности Q; сл С о сл к сл 1
| Ходыко С.А | |||
| и др | |||
| К вопросу создания системы автоматического регулирования процессов дезинтеграции и грохочения | |||
| Тезисы докладов НТС | |||
| Автоматизация технологических процессов и управление открытыми горными работами | |||
| СГИ: Свердловск, 1972, с | |||
| Приспособление в центрифугах для регулирования количества жидкости или газа, оставляемых в обрабатываемом в формах материале, в особенности при пробеливании рафинада | 0 |
|
SU74A1 |
| Способ управления скруббером | 1979 |
|
SU863783A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
