Изобретение относится к управлению барабанными промывочными машинами (БПМ), предназначенными для промывки руд россыпных месторождений и нерудных строительных материалов, и является усовершенствованием изобретения по авт.св. №1652457.
БПМ с торцовыми разгрузочными решетками оборудуются элеваторными разгрузочным / устройствами (ЭРУ) для извлечения неразмываемых включений, а также повышения пропускной способности при пиках исходной производительности Q. При широком диапазоне изменения Q эффективность размыва е, т.е. количество материала, которое необходимо удалить из БПМ, также изменяется значительно. В этой связи предусмотрено оборудование БПМ
регулируемым элеваторным разгрузочным устройством.
Однако эффективность работы этого устройства недостаточно высока, поскольку оно не обеспечено средствами автоматического регулирования.
Наиболее близким по технической сущности к предлагаемому является способ управления БПМ. основанный на регулировании частоты вращения ее барабана пропорционально величине рассогласования между заданной нагрузкой привода и ее текущим значением. При этом способе с целью увеличения точности управления величину задания нагрузки привода формируют как сумму величин, пропорциональных частоте вращения барабана, исходной производительности машины и нагрузке ее холостого хода. При этом
ю сл сл о
ю
последняя есть возрастающая функция частоты вращения барабана, границы изменения которой задают в определенных пределах.
Недостаток данного способа управле- ния заключается в низкой точности его для БПМ с торцовой разгрузочной решеткой, поскольку из-за наличия последней происходит накопление внутри барабана неразмываемых включений, а при пиках исходной производительности - и значительного количества неразмытого материала, что приводит к заполнению барабана выше допустимой нормы и следовательно к ухудшению технологических показателей про- цесса промывки.
Цель изобретения - повышение производительности БПМ с торцевой разгрузочной решеткой, оборудованных регулируемыми ЭРУ.
Поставленная цель достигается тем, что измеряют промывистость V и крупность а и формируют сигнал задания Уэ на регулятор частоты вращения элеваторного разгрузочного устройства согласно выражению иэ Ki(P - К2 - КЗПБ)(К/ - КЗПБ - Кб V + «), где Ki-K - коэффициенты, учитывающие конструктивные параметры элеваторного разгрузочного устройства, барабанной промывочной машины и их приводов.
При этом сомножитель Р - К2 - Kans в сигнале задания пропорционален исходной производительности БПМ, а сомножитель tGj - KsnB .- Кб v + «) - долевой части . недомытого материала на выходе БПМ. Про- изведение этих величин дает сигнал, пропорциональный количеству недомытого материала (выходной производительности).
Способ предусматривает непрерывное вычисление количества недомытого материала, что, в свою очередь обеспечивает не- прерывное вычисление сигнала задания Us и установку требуемой частоты вращения пэ элеваторного разгрузочного устройства.
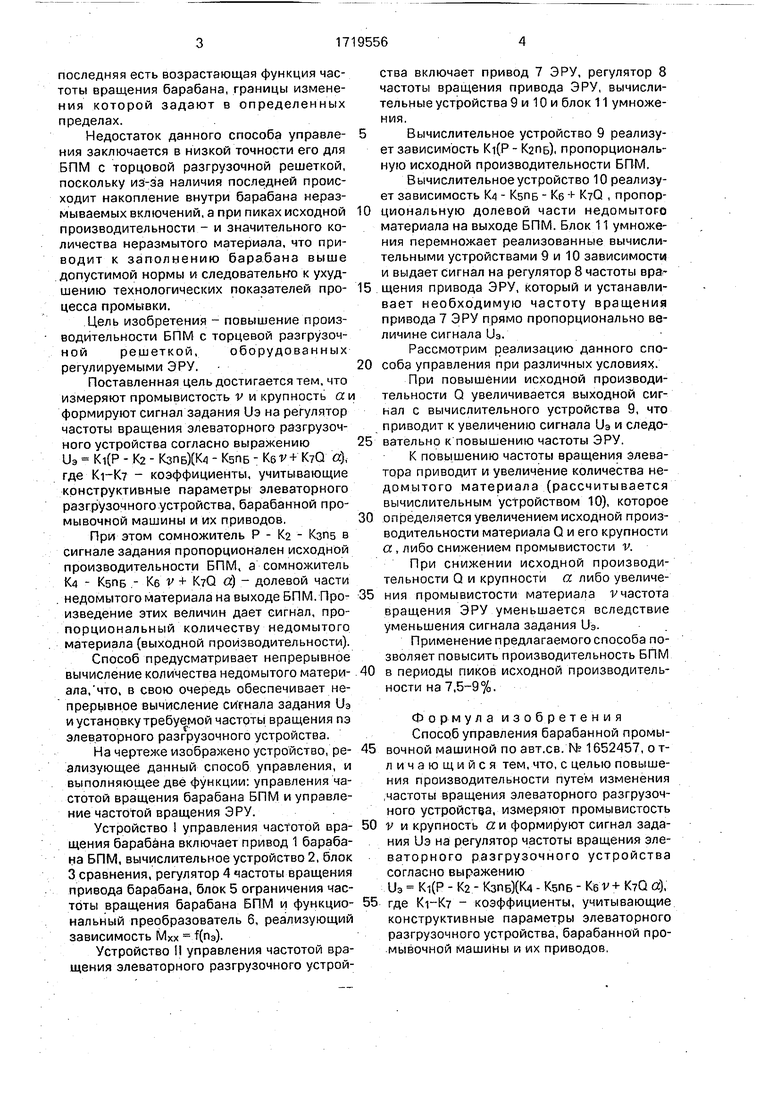
На чертеже изображено устройство, ре- ализующее данный способ управления, и выполняющее две функции: управления частотой вращения барабана БПМ и управление частотой вращения ЭРУ.
Устройство I управления частотой вра- щенмя барабана включает привод 1 барабана БПМ, вычислительное устройство 2, блок 3 сравнения, регулятор 4 частоты вращения привода барабана, блок 5 ограничения частоты вращения барабана БПМ и функцио- нальный преобразователь 6, реализующий зависимость МХх f(n3).
Устройство II управления частотой вращения элеваторного разгрузочного устройства включает привод 7 ЭРУ, регулятор 8 частоты вращения привода ЭРУ, вычислительные устройства 9 и 10 и блок 11 умножения.
Вычислительное устройство 9 реализует зависимость Ki(P- К2ПБ), пропорциональную исходной производительности БПМ.
Вычислительное устройство 10 реализует зависимость К - КБПБ - Ке + , пропорциональную долевой части недомытого материала на выходе БПМ. Блок 11 умножения перемножает реализованные вычислительными устройствами 9 и 10 зависимости и выдает сигнал на регулятор 8 частоты вращения привода ЭРУ, который и устанавливает необходимую частоту вращения привода 7 ЭРУ прямо пропорционально величине сигнала иэ.
Рассмотрим реализацию данного способа управления при различных условиях.
При повышении исходной производительности Q увеличивается выходной сигнал с вычислительного устройства 9, что приводит к увеличению сигнала 1)э и следовательно к повышению частоты ЭРУ.
К повышению частоты вращения элеватора приводит и увеличение количества недомытого материала (рассчитывается вычислительным устройством 10), которое определяется увеличением исходной производительности материала Q и его крупности а , либо снижением промывистости v.
При снижении исходной производительности Q и крупности а либо увеличения промывистости материала v частота вращения ЭРУ уменьшается вследствие уменьшения сигнала задания Us.
Применение предлагаемого способа позволяет повысить производительность БПМ в периоды пиков исходной производительности на 7,5-9%.
Формула изобретения Способ управления барабанной промывочной машиной по авт.св. № 1652457, о т- л и чающийся тем, что, с целью повышения производительности путем изменения .частоты вращения элеваторного разгрузочного устройства, измеряют промывистость V и крупность а и формируют сигнал задания иэ на регулятор частоты вращения элеваторного разгрузочного устройства согласно выражению
U3 Ki(P - К2- КзпБ)(К4 - Кбпв - Кб v + а), где Ki-K - коэффициенты, учитывающие конструктивные параметры элеваторного разгрузочного устройства, барабанной промывочной машины и их приводов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления барабанной промывочной машиной | 1988 |
|
SU1652457A1 |
| Устройство для промывки руды в технологических секциях | 1982 |
|
SU1084071A1 |
| Система управления приводом летучих ножниц | 1987 |
|
SU1523269A1 |
| Способ управления приготовлением сырьевого шлама цементного производства | 1989 |
|
SU1719080A1 |
| Способ управления скруббером | 1979 |
|
SU863783A1 |
| Способ управления двухбарабанным ленточным конвейером | 1984 |
|
SU1286474A1 |
| УСТАНОВКА ДЛЯ ГРАНУЛЯЦИИ ШЛАКА | 1991 |
|
RU2030365C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ДРОБЛЕНИЯ МАТЕРИАЛА | 2001 |
|
RU2204438C1 |
| ГИДРАВЛИЧЕСКОЕ ПРОМЫВОЧНОЕ УСТРОЙСТВО | 1993 |
|
RU2066566C1 |
| Способ автоматического управления процессом мокрого измельчения руды в шаровой мельнице | 1982 |
|
SU1039560A1 |
Изобретение относится к управлению барабанными промывочными машинами (БПМ), оборудованными элеваторными разгрузочными устройствами (ЭРУ). Цель изобретения - повышение производительности путем изменения частоты вращения ЭРУ. Способ основан на регулировании частоты вращения ЭРУ пропорционально величине задания, которая определяется количеством недомытого материала. Повышение точности управления при данном способе достигается тем, что задание на регулятор частоты вращения элеватора U9 формируют пропорционально количеству недомытого материала, рассчитанного по измеренным значениям мощности привода барабана Р, частоте его вращения ПБ, производительности по исходному материалу Q, его промы- вистости v и крупности а согласно выражению (Р-К2-КзпБ}(К4-К5ПБ-Кб+ v а), где К1-К7 - коэффициенты, учитывающие конструктивные параметры ЭРУ, БПМ и их приводов. 1 ил. сл с
| Дезинтегратор для промывки глинистых материалов | 1980 |
|
SU899128A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ управления барабанной промывочной машиной | 1988 |
|
SU1652457A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
