О 00 00
ю ч
Изобретение относится к горноперера- батывающей и строительной промышленности, черной и цветной металлургии, в частности к устройствам управления процессом дробления кускового сырья, и может быть использовано в автоматизированных системах управления процессом дробления и автоматических устройствах управления конусными дробилками среднего и мелкого дробления.
Целью изобретения является повышение точности управления и сокращение энергозатрат.
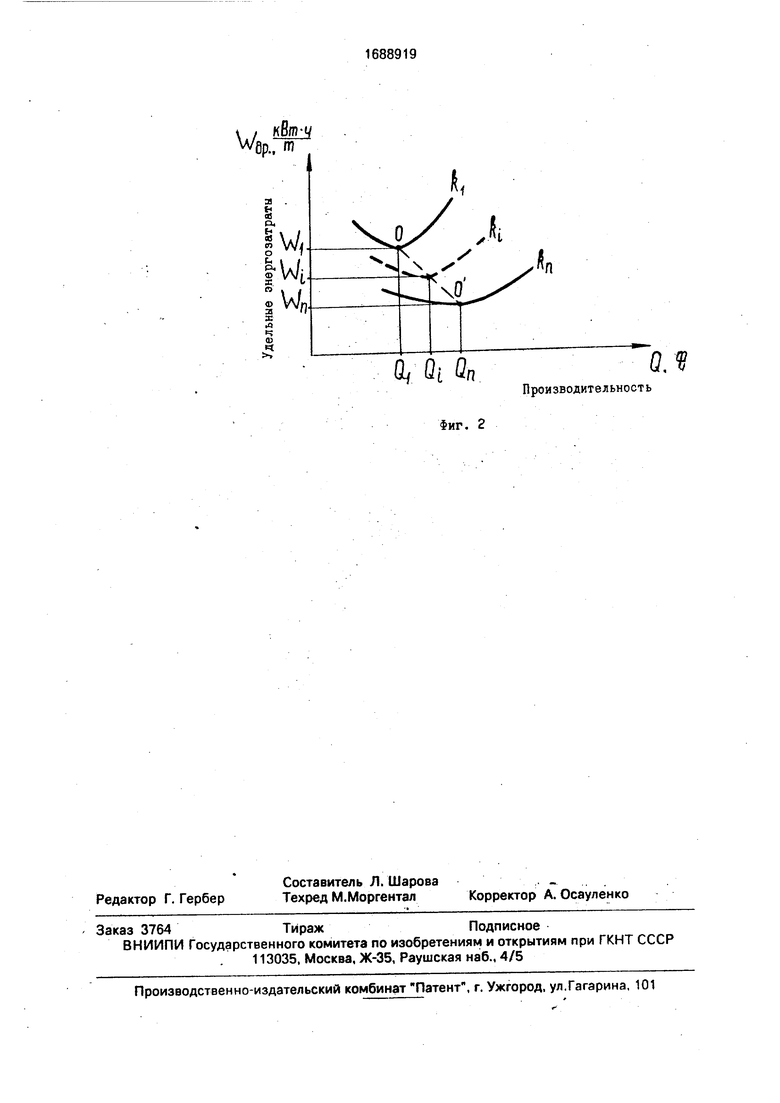
На фиг. 1 представлена блок-схема устройства; на фиг. 2 - семейство зависимостей удельных энергозатрат на дробление от производительности дробилки по дробленому сырью при различных физико-механических свойствах и гранулометрическом составе подаваемого на дробление сырья.
Устройство содержит датчик 1 активной мощности электропривода, дробилку 2 и задатчик 3 мощности холостого хода, сумматор 4, первый интегратор 5, датчик 6 производительности, второй интегратор 7, блок 8 деления, экстремальный регулятор 9 и регулируемый привод 10 питателя 11.
Устройство работает следующим образом.
При работе дробилки 2 без подачи сырьевой нагрузки определяют значение мощности холосто го хода Рхх электропривода по величине сигнала датчика 1 активной мощности и устанавливают это значение задат- чиком 3 мощности холостого хода. Питателем 11 в дробилку 2 подают исходное сырье QHCX с текущими физико-механическими свойствами и гранулометрическим составом.
Текущие величины мощности PI электропривода и производительности QI дробилки 2 контролируются датчиками активной мощности 1 и производительности 6. Сумматором 4 определяется разность сигналов Pi и Рхх, которая прямо пропорциональна мощности Рдр, затрачиваемой собственно на дробление исходного сырья.
Интеграторами 5 и 7 определяются интегральные значения соответственно мощности дробления / Рдр- dt и производительности / Qi dt дробилки 2. В блоке 8 деления определяется текущая величина отношения интегральных значений /Рдр di/ // Qi dt, которая прямо пропорциональна удельным энергозатратам Л/ДР на дробление исходного сырья. Удельные энергозатраты WAP на дробление сырья с конкретными физико-механическими свойствами и гранулометрическим составом ki зависят от производительности QI дробилки и имеют выраженный экстремум- минимум (фиг. 2). Посредством экстремального регулятора 9 определяется
экстремальное значение отношения / Рдр dt/ // Qcdt, прямо пропорциональное удельным энергозатратам WAP на дробление и формируется управляющий сигнал величиной Uynp, который отрабатывается регулируе0 мым приводом 10 питателя 11, изменяющим количество подаваемого на дробление исходного сырья бисх, за счет чего и обеспечивается оптимальное по удельным энергозатратам Л/ДР ведение процесса
5 дробления в режиме разрушения по принципу кусок о бронь, при конкретных физико-механических свойствах и гранулометрическом составе К|, подаваемого на дробление сырья. В процессе работы
0 дробилки 2 изменяются физико-механические свойства и гранулометрический состав ki. подаваемого на дробление сырья, которым соответствует одна из возможных кривых и ее экстремум семейства зависимо5 стей. Каждое новое из экстремальных значений удельных энергозатрат Л/ДР отрабатывается устройством управления в последовательности, аналогичной вышеизложенной. При этом устройством управле0 ния производится изменение количества Оисх, подаваемого на дробление сырья в функции экстремального значения удельных энергозатрат Л/ДР, которой соответствует линия ОО1 (фиг. 2).
5 Предлагаемое устройство позволит повысить точность управления и сократить энергозатраты.
Формула изобретения Устройство автоматического управле0 ния процессом дробления сырья в конусной дробилке, содержащее датчик активной мощности электропривода дробилки, датчик производительности дробилки, блок деления, экстремальный регулятор и
5 регулируемый привод питателя, причем выход блока деления подключен через экстре- мальный регулятор к регулируемому приводу питателя, отличающееся тем, что, с целью повышения точности управле0 ния и сокращения энергозатрат, оно снабжено сумматором, задатчиком мощности холостого хода и двумя интеграторами, причем датчик активной мощности и задатчик мощности холостого хода подключены к со5 ответствующим входам сумматора, выход которого через первый интегратор подключен к одному из входов блока деления, а датчик производительности дробилки через второй интегратор подключен к другому входу блока деления.
Производительность
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического управления работой дробильно-перегрузочного комплекса | 1987 |
|
SU1470339A1 |
| Способ и система адаптивного управления загрузкой дробилки | 1985 |
|
SU1251952A1 |
| Система регулирования загрузки дробилки | 1989 |
|
SU1630848A1 |
| Система управления процессом дробления в конусной дробилке | 1990 |
|
SU1727909A1 |
| Устройство для контроля учета износа броней камеры дробления конусных дробилок | 1986 |
|
SU1324689A1 |
| Способ автоматического управления процессом дробления кускового сырья в конусной дробилке | 1985 |
|
SU1268203A1 |
| Устройство для управления многостадийным процессом дробления | 1982 |
|
SU1036374A1 |
| Система управления пресс-гранулятором | 1984 |
|
SU1194690A1 |
| Способ управления загрузкой параллельно работающих размольных агрегатов | 1987 |
|
SU1521500A1 |
| Устройство для регулирования производительности дробилки | 1983 |
|
SU1135493A1 |
Изобретение относится к горноперера- батывающей и строительной промышленности, черной и цветной металлургии, в частности к устройствам управления процессом дробления кускового сырья.и может быть использовано в устройстве управления конусными дробилками среднего и мелкого дробления. Цель изобретения - повышение точности управления и сокращение энергозатрат. Устройство содержит датчик 1 активной мощности электропривода дробилки 2, задатчик 3 мощности холостого хода, сумматор 4, интегратор 5, датчик 6 производитель- ности, интегратор 7, блок 8 деления, экстремальный регулятор 9 и регулируемый привод 10 питателя 11. 2 ил. z Ј
Фиг. 2
| Способ автоматического управления режимом дробления | 1985 |
|
SU1268202A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ автоматического управления загрузкой дробилки | 1974 |
|
SU527203A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
