Изобретение относится к элементам подъемно-транспортных и роботизированных систем, предназначенных для захвата и последующего переноса гибких деталей типа тканей и может найти применение на предприятиях легкой промышленности.
Цель изобретения - расширение эксплуатационных возможностей и повышение надежности захвата.
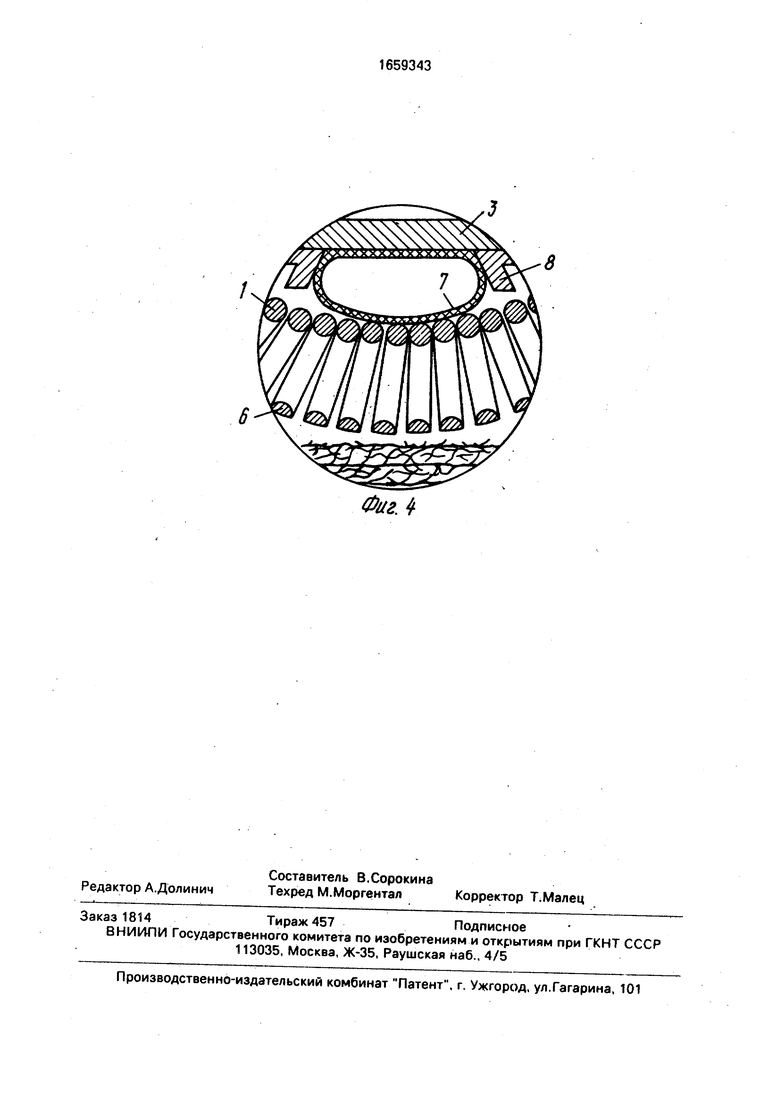
На фиг.1 изображена принципиальная схема захватного приспособления; на фиг.2 - пружина; на фиг.З - сечение А-А на фиг.2; на фиг.4 - пружина с раздвинутыми под воздействием привода витками.
Устройство содержит цилиндрическую пружину 1, привод 2 и раму 3. Цилиндрическая пружина 1 установлена на раме 3 с помощью концевых держателей 4 и шарниров 5. Пружина 1 имеет срез 6 на нижней
части поверхности, обращенной в сторону захватываемого предмета. Привод 2 служит для раздвигания витков и выполнен в виде замкнутой тонкостенной оболочки 7 из упругого материала, например резины, размещенной над центральной частью пружины 1 в ограничительном кожухе 8, установленном на раме 3. Оболочка 7 имеет штуцерное подсоединение 9 к источнику сжатого воздуха и шарнирный выступ 10 для подсоединения к руке робота, манипулятора или другого транспортного средства.
Устройство работает следующим образом.
В исходном положении рама 3 захватного приспособления находится выше стопы деталей, а цилиндрическая пружина 1 располагается горизонтально. Во время приближения рамы 3 посредством руки роО
СП Ю СО
со
бота (не показано) через штуцерное подсоединение 9 сжатый воздух направляется в оболочку 7. При этом пружина 1 прогибается, поворачиваясь вокруг шарниров 5 держателей 4. В результате этого нижняя срезанная плоскость пружины 1 превращается в мно- гозевную цангу, состоящую из большого количества раскрытых цанг с острыми гранями (см.фиг.4). Когда изогнутая пружина 1 заходит в контакт с верхней деталью стопы, микроцанги по мере прижатия к поверхности мягкой текстильной детали начинают закрываться, захватывая при этом ворсинки и микронеровности поверхности ткани. При полном опускании рамы 3 пру- жина 1 принимает исходный горизонталь- ный вид. Воздух из оболочки 7 выпускается. Рама 3 вместе с захваченной деталью переносится в нужном направлении. Затем сжатый воздух опять подается в оболочку 7 и текстильная деталь сбрасывается с рабочей поверхности и пружины 1, так как многозев- ная цанга открывается. Затем рабочий цикл повторяется.
Ограничительный .кожух 8 удерживает тонкостенную оболочку 7 и ограничивает его деформацию. Предлагаемое устройство
в зависимости от величины и формы отделяемых деталей на раме 3 может иметь большое количество пружины 1, расположенных разнообразно.
Срез боковой поверхности пружины на глубину до 1/2 диаметра ее проволоки со-. здает острые грани захватных цанг, которые могут захватить малейшие выступы на поверхности, что повышает надежность захвата.
Формула изобретения Захватное приспособление, содержащее раму, горизонтально закрепленную на ней цилиндрическую пружину и привод для раздвигания витков пружины, отличающееся тем, чтб, с цель to расширения эксплуатационных возможностей и повышения надежности захвата, привод для раздвигания витков пружины выполнен в виде сообщенной с источником сжатого воздуха замкнутой тонкостенной оболочки из упругого материала, установленной на раме над центральной частью пружины в открытом снизу кожухе, при этом на нижней части поверхности пружины выполнен срез, глубина которого не превышает 1/2 диаметра проволоки пружины.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для отделения деталей от пачки | 1989 |
|
SU1671590A1 |
| Устройство для захвата уложенных в стопу текстильных заготовок | 1990 |
|
SU1733361A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 2009 |
|
RU2409514C1 |
| Грузоподъемное устройство | 1986 |
|
SU1364591A1 |
| Устройство для захвата плоских мягких изделий | 1988 |
|
SU1574522A1 |
| Захватное устройство | 1981 |
|
SU958081A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ КИПОВЫХ ГРУЗОВ | 2007 |
|
RU2340541C1 |
| Устройство для захвата текстильных заготовок | 1990 |
|
SU1735174A1 |
| Устройство для захвата деталей из текстильного материала | 1988 |
|
SU1601053A1 |
| УСТРОЙСТВО РАЗЪЕМНОГО ГЕРМЕТИЧНОГО ЭЛЕКТРИЧЕСКОГО СОЕДИНИТЕЛЯ ПО ТИПУ "МОКРЫЙ КОНТАКТ" ДЛЯ ЭЛЕКТРИЧЕСКОГО СОЕДИНЕНИЯ КАБЕЛЬНОЙ ЛИНИИ В ПРОВОДЯЩЕЙ СРЕДЕ | 2013 |
|
RU2551134C2 |
Изобретение относится к элементам подъемно-транспортных роботизированных систем, предназначенных для захвата и последующего переноса гибких деталей типа тканей, и может найти применение на предприятиях легкой промышленности. Цель изобретения - расширение эксплуатационных возможностей и повышение надежности захвата. Захватное приспособление содержит цилиндрическую пружину, закрепленную на раме. Для захвата деталей цилиндрическая пружина прогибается с помощью привода в виде установленной на раме над пружиной тонкостенной замкнутой оболочки, сообщенной с источником сжатого воздуха. При прогибании пружины ее витки раздвигаются и, когда изогнутая пружина заходит в контакт с деталью, происходят сдвигание витков и захват ворсинок и микронеровностей деталей (кусков ткани). На нижней поверхности пружины имеется срез на глубину, не превышующую 1 /2 диаметра пружины, что повышает надежность захвата.4 ил. Ё
Фиг. /
А-А
Фиг. $
| Авторское свидетельство СССР Ne1405229, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
