(Л
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для захвата плоских мягких изделий | 1988 |
|
SU1574522A1 |
| Захватное устройство | 1989 |
|
SU1717511A1 |
| Устройство для отделения мягких деталей от пачки | 1988 |
|
SU1574523A1 |
| Захватное устройство | 1981 |
|
SU958081A1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Устройство для захвата гибких листовых материалов | 1988 |
|
SU1611822A1 |
| Устройство поштучного отделения текстильных деталей от пачки | 1984 |
|
SU1284914A1 |
| Устройство для отделения детали от пачки | 1986 |
|
SU1406103A1 |
| Устройство для захвата и отделения от пачки деталей из мягкого материала | 1987 |
|
SU1509320A1 |
| Устройство для отделения и захвата мягких деталей от пачки | 1988 |
|
SU1570982A1 |

Изобретение относится к элементам подъемно-транспортных и роботизированных систем, в частности к устройствам для отделения деталей от пачки, и позволяет повысить надежности захвата и расширить технологические возможности. Устройство для отделения деталей от пачки содержит корпус и призматическую винтовую пружину. К корпусу подсоединен гибкий элемент, проходящий через винтовую пружину. Пружина прикреплена за средний виток к ролику с канавкой, закрепленному посредством вилки на штоке, соединенном с фиксатором и проходящем через этот корпус. Винтовая пружина выполнена призматической из проволоки прямоугольного или полукруглого сечения. 1 з.п. ф-лы. 11 ил.
Изобретение относится к элементам подъемно-транспортных и роботизированных систем, предназначенных для отделения и последующего переноса плоских мягких деталей типа тканей, трикотажных полотен, ковров с ворсом, меха и т.п., и можег найти применение на предприятиях швейной, обувной и трикотажной промышленности.
Целью изобретения является повышение надежности захвата и расширение технологических возможностей
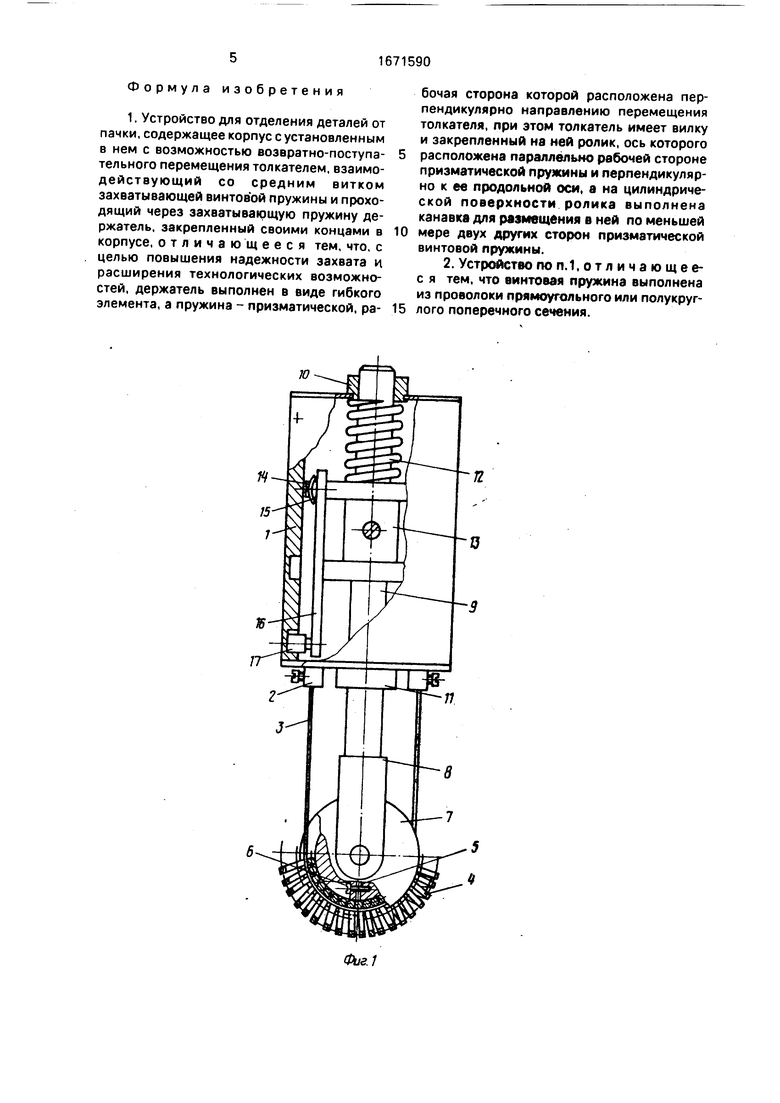
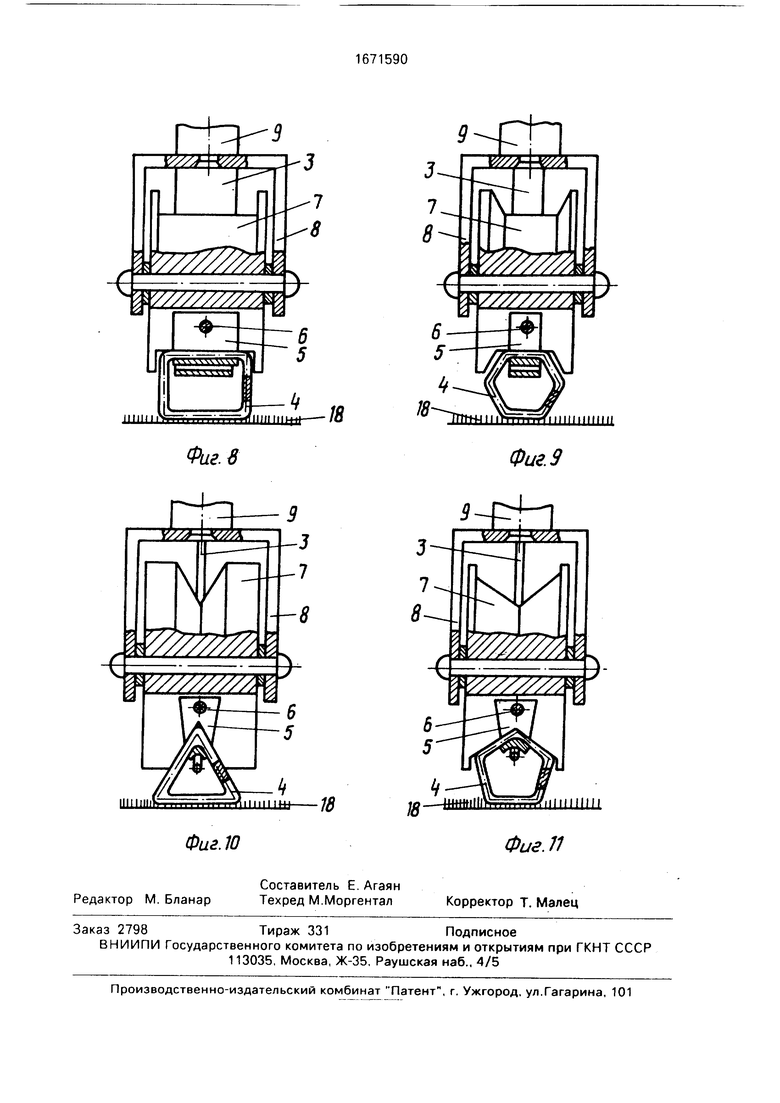
На фиг.1 изображено устройство, общий вид, на фиг 2 - положение пальца в канавке корпуса в момент переноса детали; на фиг 3 - то же, в момент освобождения детали, на фиг 4 - то же, в исходный момент; на фиг 5 то же, в момент захвата детали; на фиг 6 - начало захвата детали, на фиг.7 - отделение детали от пачки, на фиг 8 - за хватная часть устройства в момент переноса детали четырехгранной призматической пружиной, вид сбоку; на фиг.9 -то же, в момент переноса детали шестигранной призматической пружиной; на фиг. 10 - то же, в момент переноса детали трехгранной призматической пружиной; на фиг. 11 -то же, в момент переноса детали пятигранной призматической пружиной.
Устройство (фиг.1) содержит корпус 1, снизу которого в держателях 2 зафиксиро- ванны концы гибкого элемента 3, проходя- чего через захватывающую пружину 4, прикрепленную с помощью обоймы 5 и винта б за средней виток в канавке ролика 7, закрепленного в вилке 8, установленной на штоке 9, проходящего через верхнюю 10 и нижнюю 11 втулки корпуса, причем на нем надета возвратная пружина 12 и закреплен держатель 13, на котором шарнирно с помощью винта 14 и пружинной шайбы 15 установлены фиксатор 16 с пальцем 17. расО
XI
сл о о
положенным в канавке одной из стенок корпуса.
Захватывающая пружина может быть цилиндрической или призматической, витки которой полукруглого или прямоугольного сечения, В зависимости от формы пружины канавка на ролике может быть полукруглой или прямоугольной, а гибкий элемент - соответственно в виде тросика или тонкой ленты.
Для работы устройство фиксируется за корпус в вертикальном положении в схвате промышленного манипулятора (не показан). В исходном положении шток 9 находится в нижнем положении по отношению к корпусу 1, гибкий элемент 3 натянут, а захватывающая пружина 4 огибает ролик 7 (фиг.1).
Устройство работает следующим образом. При опускании корпуса 1 в контакт с верхней деталью 18 пачки 19 входит нижняя часть деформированной захватной пружины 4 (фиг.6).
Надежность захвата достигается за счет специальной формы пружины 4 призматической, что обеспечивает не точечный контакт, а линейный контакт рабочей поверхности пружины 4 с захватываемой деталью 18. Длина захватываемой складки зависит от ширины пружины 4. Палец 17 фиксатора 16 в этот момент находится в канавке корпуса 1, фиксируя устройство в исходном положении (фиг.4). При дальнейшем опускании корпуса 1 начинается его движение относительно остановившегося штока 9 до перехода пальца 17 фиксатора 16 по канавке корпуса 1 в положение, фиксирующее момент захвата верхней детали 18 пачки 19 (фиг.5), причем в это время гибкий элемент 3 постепенно освобождается и деформированная захватная пружина 4 выпрямляется, зажимая между нижней частью своих витков микронеровности или складки этой детали.
Постепенный перевод пружины 4 из дугообразного положения в прямолинейное обеспечивает образование складок или захват ворса отделяемой детали средней частью пружины 4 в нескольких местах. Самая большая складка захватывается между витками в середине пружины 4, а следующие складки, с их удалением от середины пружины, уменьшаются. Для захвата деталей необязателен раЁномерный захват по всей длине пружины 4. После этого корпус 1 останавливается и начинает двигаться вверх (шток 9 с выпрямившейся захватной пружиной 4 стоит), а палец 17 фиксатора 16 по канавке корпуса 1 переходит в следующее положение, фиксируя устройство для отделения и переноса захваченной детали
(фиг.2). При дальнейшем движении корпуса 1 вверх с ним начинает двигаться вверх и шток 9 с выпрямленной захватной пружиной 4, зажатой деталью 18 (фиг.7). В таком
состоянии устройство с захваченной деталью 18 перемещается манипулятором в заданное место и опускается до соприкосновения этой детали, а тем самым и захватывающей пружины 4 с поверхностью, на
которой она должна быть уложена.
При дальнейшем движении корпуса 1 вниз начинается его движение относительно остановившегося штока 9, до перехода пальца 17 фиксатора 16 по канавке корпуса
1 в положение, фиксирующее момент освобождения детали в заданном месте (фиг.З). После этого корпус 1 останавливается и начинает двигаться вверх (шток 9 под воздействием возвратной пружины 12 стоит), а
палец 17 фиксатора 16 по канавке корпуса 1 переходит в следующее положение, фиксируя устройство в исходном положении (фиг.4), причем в это время гибкий элемент 3 натягивается и деформирует захватную
, пружину 4, тем самым освобождая деталь 18. В таком состоянии устройство поднимается и перемещается манипулятором над пачкой деталей 19, и цикл повторяется. Эффект от использования изобретения
заключается в упрощении конструкции, повышении надежности захвата и переноса отделяемой детали от пачки.
Упрощение конструкции достигается за счет отсутствия специальных приводов для
растяжения и деформирования захватывающей пружины.
Повышение надежности захвата отделяемой детали достигается за счет применения специального профиля проволоки для захватывающей пружины, повышающей возможность захвата микронеровностей отделяемой детали или образования на ней складок острыми кромками этой проволоки,
за счет применения призматической пружины, позволящей увеличить площадь захвата (плодащь контакта захватывающей пружины с отделяемой деталью), а также в результате деформации пружины вокруг ролика, а
0 не ее растяжения, позволяющей создать большие зазоры между отдельными витками захватывающей пружины.
Повышение надежности переноса отде- 5 ленной детали от пачки достигается за счет того, что захватывающая пружина с зажатой деталью поднимается за ее средний виток и прогибается в такой способ, что еще больше зажимает микронеровности или складхи детали между своими витками.
Формула изобретения
0
5
бочая сторона которой расположена перпендикулярно направлению перемещения толкателя, при этом толкатель имеет вилку и закрепленный на ней ролик, ось которого расположена параллельно рабочей стороне призматической пружины и перпендикулярно к ее продольной оси, а на цилиндрической поверхности ролика выполнена канавка для размещения в ней по меньшей мере двух других сторон призматической винтовой пружины.
фиг. 2
ФигЛ
ШИШ
1 i if
Фиг. 6
Фиг. 5
Millм HIM I lii i i i.. i
Ц I 1 1 I I I I I I I I I I I i I t i I I I i I i i I i I I i 1 I i i I i I ii .
Ill H til II II 1 I I 1 I 1 I 1 I I I II 111
Hi i mini
Фиг.1
| ПРИСПОСОБЛЕНИЕ ДЛЯ РАСТОЧКИ ГЛУБОКИХ ОТВЕРСТИЙ | 0 |
|
SU246281A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
