Изобретение относится к области сварки, в частности к вспомогательному оборудованию для закрепления деталей, и является усовершенствованием устройства по авт. св. № 1388245.
Цель изобретения - повышение быстродействия и надежности работы устройства.
На чертеже изображена схема зажимного устройства.
Устройство содержит корпус 1, левый 2 и правый 3 гидроцилиндры , закрепленные в корпусе 1 и имеющие поршни 4 и 5 со штоками 6 и 7, левую 8 и правую 9 зажимные колодки, соединенные со штоками 6 и 7, направляющую 10 корпуса 1, в которой установлены зажимные колодки 8 и 9. Со штоками 6 и 7 жестко связаны штанги 11 и 12, соединенные с подвижными элементами 13 и 14 электрических датчиков 15 и 16 линейных перемещений. Устройство содержит также двухпозиционный четырехлинейный золотник 17 с двумя управляющими входами, подключенный к источнику давления (напорной.магистрали) через редукционный клапан 18. Выходы электрических датчиков 15 и 16 линейных перемещений подключены к управляющим входам усилителя-сумматора 19, первый выход которого подключен к входу гидрораспределителя 20 с пропорциональным электрическим управлением, а второй связан дополнительной магистралью 21 (выполняющей в системе управления роль местной обратной связи) с управляющим входом двухпозиционного четырехлинейного золотника 17.
Гидрораспределитель 20 выполнен в виде проточного гидрораспределителя 22 с плунжером 23, нагруженным пружинами 24 и 25, и гидрораспределителя 26 типа сопло - заслонка с заслонкой 27, датчиком 28 обратной связи, редукционным клапаном 29 и электромеханическим преобразователем 30. При этом один вход гидрораспределителя 20 соединен с напорной магистралью, второй выход - с штоковой полостью правого гидроцилиндра 3, третий выход - с бес- штоковойполостьюправого
гидроцилиндра, а остальные выходы - со сливом, с которым также соединена штоко- вая полость левого гидроцилиндра 2 через золотник 17, а его бесштоковая полость соединена через тот же золотник 17 с напорной магистралью.
Зажимное устройство работает следующим образом.
При подаче управляющего сигнала f на золотник 17 бесштоковая полость левого гидроцилиндра 2 соединяется с напорной магистралью и поршень 4 начинает движение по направлению к центру зажима. Электрический сигнал рассогласования Дцфор- мирующийся в усилителе-сумматоре 19 как разность сигналов Ui и Ua, поступающих с
датчиков 15 и 16, усиливается и подается на элекромеханический преобразователь 30 гидрораспределителя 20 с пропорциональным электрическим управлением и на второй вход золотника 17. По мере того, как
0 данный сигнал возрастает и достигает величины управляющего сигнала f (скорость достижения этой величины зависит от подбора и настройки элементов схемы: датчиков и усилителя-сумматора), то золотник оказыва5 ется в положении неустойчивого равновесия, т.е. может занять любое из крайних положений. В этой ситуации возможны два варианта: золотник не переключился; золотник переключился.
0В первом случае поршень 4 продолжает
движение в том же направлении (к центру зажима) и сигнал рассогласования также растет до тех пор, пока его величина не превысит управляющий сигнал, и тогда уже
5 происходит переключение золотника 17. Во втором случае переключение происходит сразу. Длительность процесса переключения зависит от подбора элементов схемы и продолжается до тех пор, пока сигнал рас0 согласования не станет меньше управляющего сигнала, т.е. пока поршень 5 правого гидроцилиИдра 3 не пройдет определенный путь по направлению к центру зажима. Таким образом, переходный процесс (в на5 чальный момент движения поршней) характеризуется колебательными явлениями, т.е. неоднократными импульсными переключениями золотника до достижения установившегося движения поршней (гру0 бый этап отслеживания), после чего поршни синхронно движутся к центру зажима (точный этап отслеживания).
Точный этап отслеживания заключается в следующем: при смещении влево за5 слонки 27 на величину, пропорциональную сигналу рассогласования Д U, в управляющих гидролиниях распределителя 22 возникает перепад давлений, смещающий его плунжер 23 вправо, увеличивая поток жид0 кости, поступающей из напорной магистрали в бесштоковую полость правого гидроцилиндра 3. В результате этого поршень бтакже начинает движение по направлению к центру зажима, т.е. перемещение
5 поршня 4 автоматически отслеживается перемещением поршня 5.
В том случае, если при захвате детали зажимными колодками 8 и 9 усилия на колодках окажутся разными, то система деталь-зажим начнет смещаться в сторону
поршня с меньшим усилием зажима. Это вызовет (через сигнал рассогласования A U) пропорциональное смещение плунжера 23 и, как следствие, перераспределение давлений в бесштоковой и штоковой полостях правого гидроцилиндра 3 до величины, при которой усилия на поршнях обоих гидроцилиндров 2 и 3 будут равны, т.е. система отработает точный этап отслеживания.
Деление этапов отслеживания на грубый и точный произведено условно, поскольку при грубом отслеживании происходит процесс быстрого притормаживания движения поршня 4( или остановка его в аварийной ситуации), а при точном - окончательное позиционирование поршня 5 (относительно положения поршня 4) посредством подачи жидкости через гидрораспределитель 22 и его соответствующие магистрали к поршневой и штоковой полостям гидроцилиндра 3. Этот процесс (точного позиционирования) имеет место и в известном устройстве«однако, поскольку там нет грубого этапа, то перемещение колодок 8 и 9 поршнями 4 и 5 соответственно до окончательного зажима детали занимает больше времени.
Таким образом, преимущество предложенного устройства перед известным обес- печено введением этапа грубого отслеживания, при котором перемещается поршень гидроцилиндра 4. Этот этап обеспечивается следующим: так как на электромеханический преобразователь 30 гидрораспределителя 20 и второй узел электроуправления двухпозиционного четырехлинейного золотника 17 (по дополнительной магистрали 21) подается электрический сигнал рассогласования A U, то при остановке поршня гидроцилиндра 4 и соответственно при переключении золотника 17 процесс отслеживания поршнем 5 положения поршня 4 не прекращается, поскольку сигнал рассогласования еще- присутствует и преобразовывается сначала в перемещения заслонки 27. а затем в перепад давлений в управляющих гидролиниях распределителя 22 и, наконец, в поток жидкости по соответствующим магистралям, воздействующий на поршень 5. Именно в этом и заключается этап точного отслеживания поршнем 5 расположения поршня 4. Этот этап заканчивается лишь с исчезновением сигнала рассогласования ( A U 0),
т.е. по достижении поршнями 4 и 5 симмет-- ричного относительно центра зажима положения, не зависит от состояния поршня 4 (его покоя или движения). Так, если левый поршень 4 перемещается, то правый поршень 5 также перемещается (только он догоняет поршень 4), если же поршень 4 после перемещения останавливается то поршень 5 также остановится по прошествии определенного времени (с запаздыванием, которое определяется быстродействием элементов схемы).
Таким образом, если реакция известного устройства проявится лишь после прохождения сигнала рассогласования через следующие элементы схемы: электромеханический преобразователь (перемещение заслонки)-управляющие гидролинии (перепад давлений в них вследствие различного сопротивления сопла гидрораспределителя) - смещение плунжера (изменяется величина потока), то в предлагаемом устройстве одновременно с прохождением сигнала по указанной длинной цепочке он проходит и по короткому пути - от второго выхода усилителя-сумматора 19 к второму узлу электроуправлениядвухпозиционногочетырехлинейного золотника 17 (по магистрали 21), обеспечивая тем самым быстрое (грубое) реагирование устройства на управляющий сигнал (импульсное переключение золотника 17), следовательно, если в известном устройстве подгоняется только поршень 5 правого гидроцилиндра 3, то в предложенном устройстве также подгоняется поршень 5 и притормаживается поршень 4 левого гидроцилиндра 2 (при переключении золотника 17). Именно за счет реакции двух поршней 4 и 5 на сигнал рассогласования достигается цель изобретения - повышение быстродействия и синхронности работы силовых элементов зажимного устройства.
Формула изобретения Зажимное устройство по авт. ев № 1388245, отличающееся тем. что, с целью повышения быстродействия и надежности в работе устройства, усилитель-сумматор выполнен с двумя выходами, а двухпозиционный четырехлинейный золотник - с двумя управляющими входами, при этом один из выходов усилителя-сумматора соединен с одним из управляющих входов двухпозиционного четырехлинейного золотника.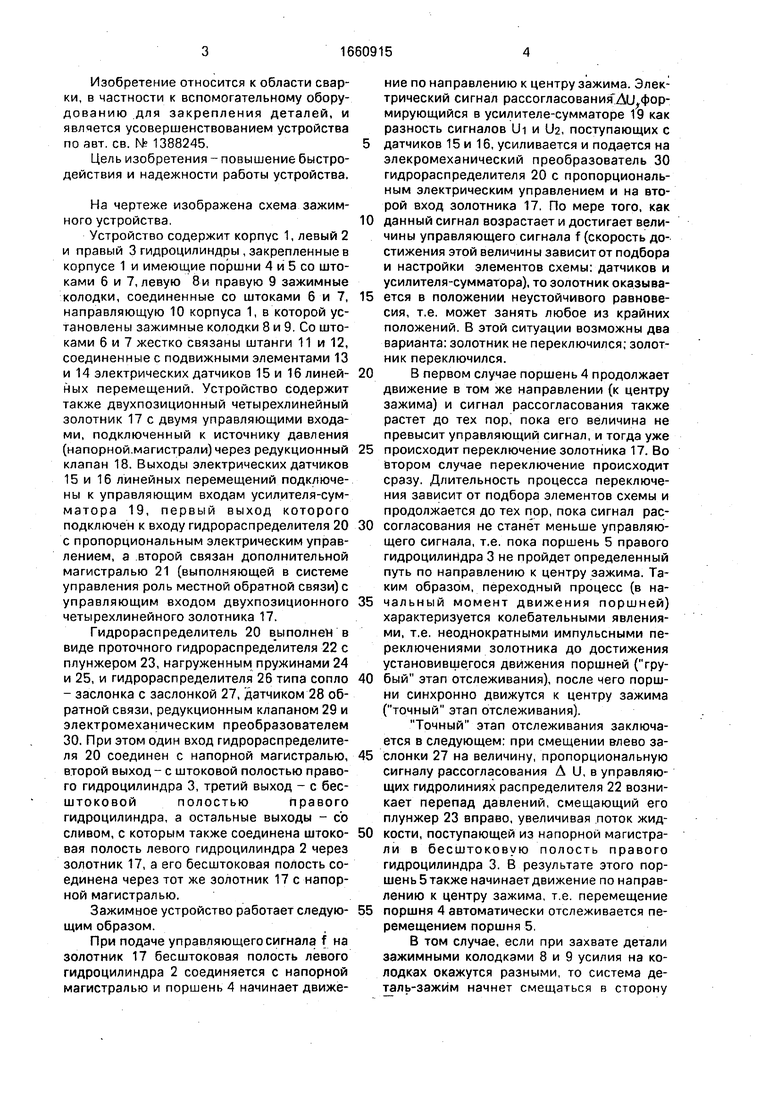

| название | год | авторы | номер документа |
|---|---|---|---|
| Зажимное устройство | 1986 |
|
SU1388245A1 |
| Зажимное устройство | 1988 |
|
SU1505724A1 |
| Зажимное устройство | 1986 |
|
SU1324803A1 |
| Система рулевого управления автопоезда | 1987 |
|
SU1474016A1 |
| СИСТЕМА КОМПЕНСАЦИИ ПОГРЕШНОСТИ ОБЕСПЕЧЕНИЯ КОВОЧНОГО РАЗМЕРА РАДИАЛЬНО-КОВОЧНОЙ МАШИНЫ | 2003 |
|
RU2241566C2 |
| ЧЕТЫРЕХЛИНЕЙНЫЙ ТРЕХПОЗИЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С РЕЗЕРВИРОВАННЫМ ЭЛЕКТРОУПРАВЛЕНИЕМ | 2009 |
|
RU2418201C1 |
| ЧЕТЫРЕХЛИНЕЙНЫЙ ТРЕХПОЗИЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С РЕЗЕРВИРОВАННЫМ ЭЛЕКТРОУПРАВЛЕНИЕМ ПРИВОДА ПОВОРОТА КОЛЕС ПЕРЕДНЕЙ ОПОРЫ ШАССИ ТРАНСПОРТНОГО СРЕДСТВА С ГИДРОДЕМПФЕРОМ | 2007 |
|
RU2342283C1 |
| Гидропривод шагового толкателя | 1987 |
|
SU1523746A1 |
| Система управления шарнирно-сочлененной гусеничной машины | 1989 |
|
SU1678684A1 |
| Челюстной погрузчик | 1988 |
|
SU1562312A1 |
Изобретение относится к сварке, в частности к вспомогательному оборудованию для закрепления изделий. Цель изобретения - повышение быстродействия и надежности устройства в работе. Разность сигналов с датчиков 15 и 16 подается на электромеханический преобразователь и на управляющий вход золотника 17, в результате чего отрабатывается этап "грубого" отслеживания, при котором поршень 4 левого гидроцилиндра 2 замедляет свое движение. Затем смещается влево заслонка 27 на величину, пропорциональную указанной разности сигналов, и в управляющих гидролиниях распределителя 22 возникает перепад давлений, смещающий его плунжер 23 вправо, чем увеличивается поток жидкости в бесштоковую полость правого гидроцилиндра 3 и происходит этап точного отслеживания, при котором поршень 5 гидроцилиндра 3 также начнет движение к центру зажима. Благодаря такой конструкции обеспечивается синхронность работы силовых элементов зажимного устройства. 1 з.п.ф-лы, 1 ил.
| Зажимное устройство | 1986 |
|
SU1388245A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
