2В 2В
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная автоматическая система вождения самоходных уборочных машин вдоль убираемых рядков | 1981 |
|
SU1007572A1 |
| Установка для исследования узлов сельскохозяйственных машин | 1974 |
|
SU582471A1 |
| УСТРОЙСТВО СИГНАЛИЗАЦИИ К МАШИНАМ ДЛЯ ОБРАБОТКИ РАСТЕНИЙВСЕСЮЮЗНЛЯАТЕЙ1НО-Ш1?11'
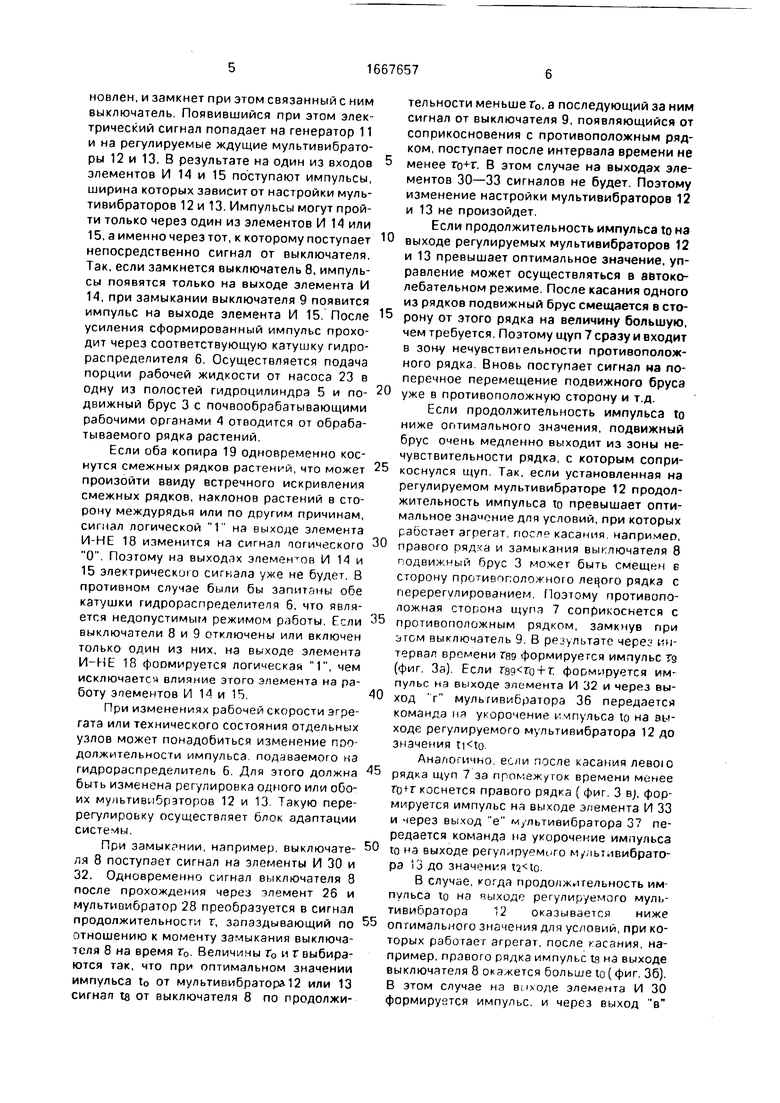
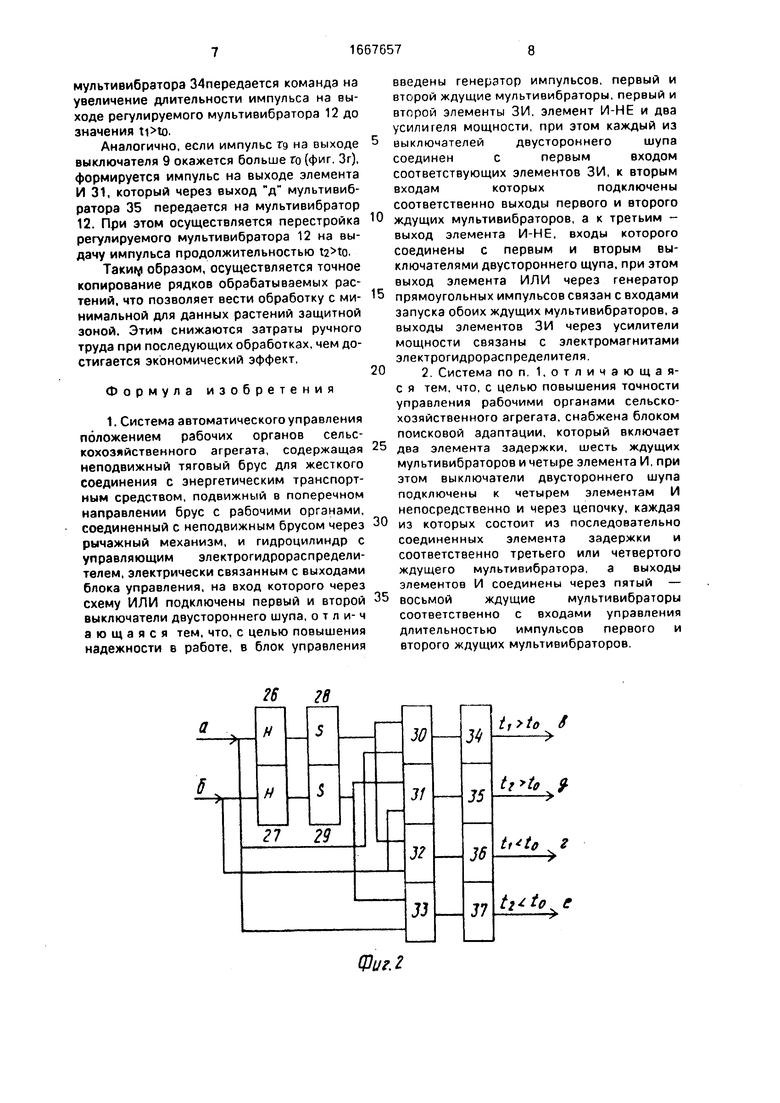
Изобретение относится к сельскохозяйственному машиностроению, в частности к автоматическим системам вождения пропашных культиваторов вдоль обрабатываемых рядков растений, например, при работе на полях плодового питомника. Цель изобретения - повышение надежности системы и точности управления рабочими органами сельскохозяйственного агрегата. При касании копирами 19 щупа 7 рядка растений срабатывает один из выключателей 8 или 9. Подвившийся сигнал запускает генератор 11, который запускает ждущие мультивибраторы 13 и 12. Импульс мультивибратора 12 или 13 (в зависимости от направления отклонения рабочих органов агрегата) через элемент И 14 или 15 поступает через усилители 16 или 17 на соответствующую обмотку электрогидрораспределителя 6 для смещения поперечной балки 3, к которой прикреплены рабочие органы агрегата. Для повышения точности отработки ждущие мультивибраторы 12 и 13 снабжены входами управления (в, г, д, е) длительностью импульса, к которым подключаются выходы блока адаптации. 1 з.п. ф-лы, 3 ил.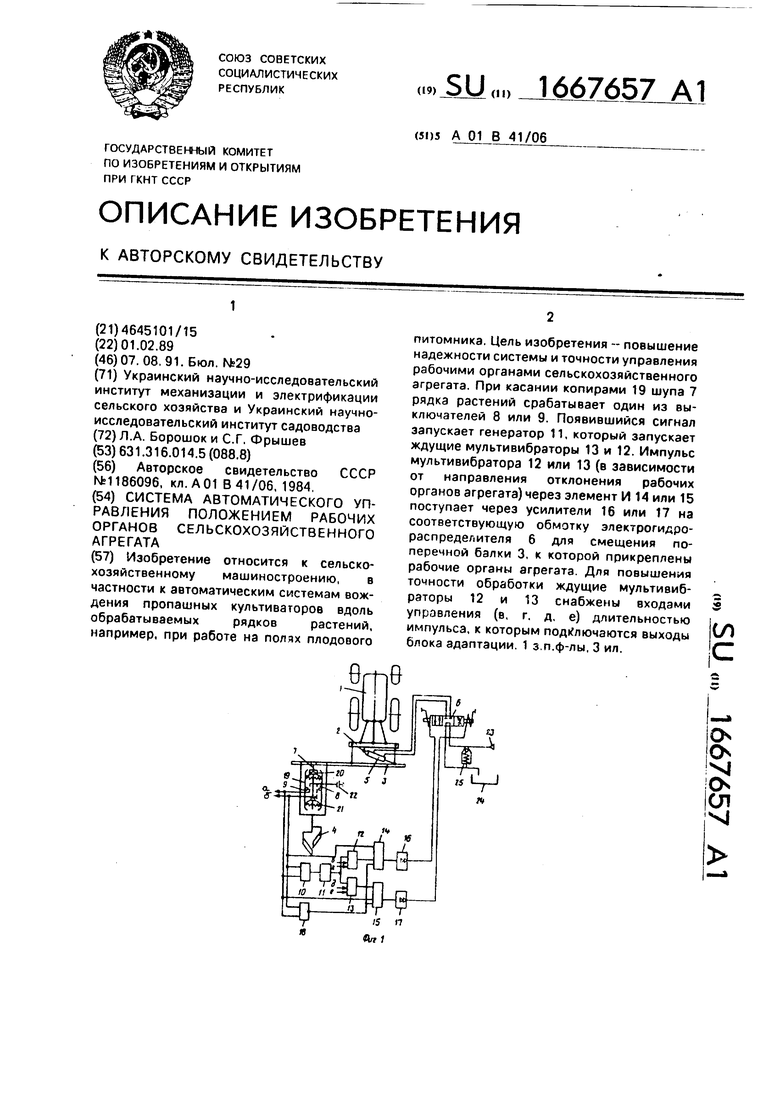
Фиг. 2
Фиг 3
| Система автоматической корректировки положения рабочих органов машины для междурядной обработки растений | 1984 |
|
SU1186096A1 |
