Изобретение относится к средствам роботизации для возведения многоэтажных крупнопанельных зданий.
Цель изобретения - улучшение эксплуатационных характеристик путем повышения точности установки груза.
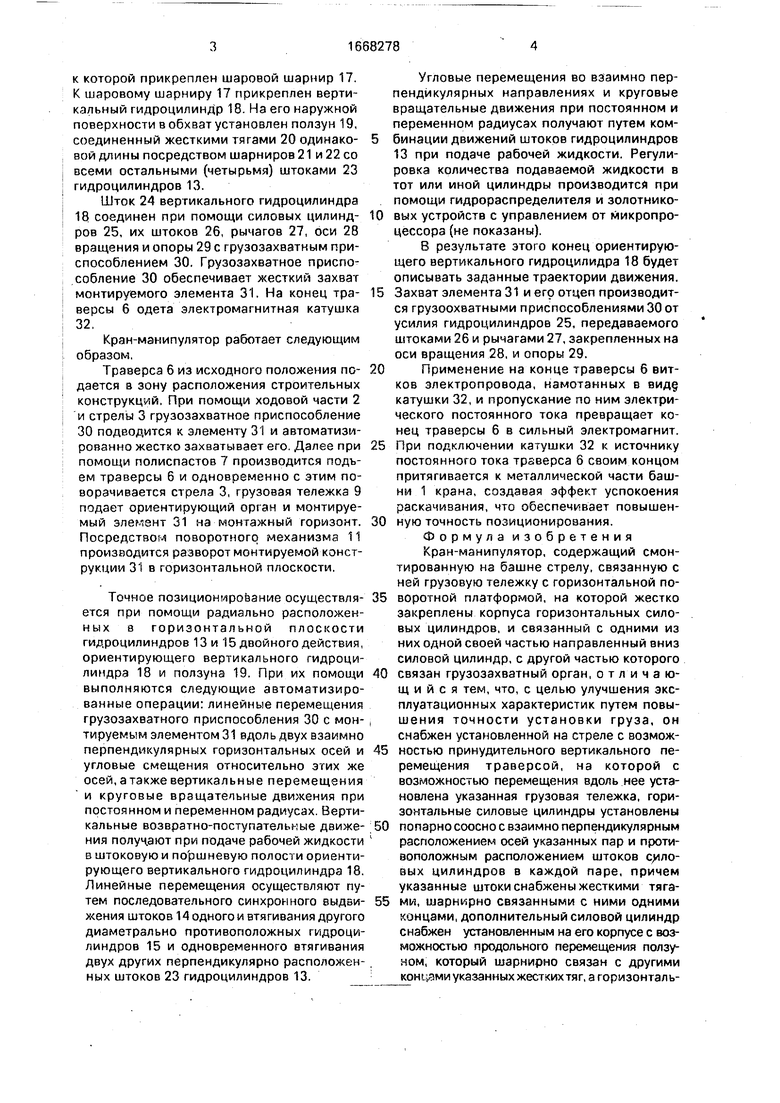
На фиг,1 изображен кран-манипулятор, общий вид; на фиг.2 -ориентирующийорган и грузозахватное приспособление; на фиг.З - ориентирующий орган, вид сбоку при наклоне грузозахватного приспособления, аксонометрия; на фиг.4 - то же, при смещении грузозахватного приспособления; на фиг.5 - разрез А - А на фиг.4.
Кран-манипулятор содержит башню 1, смонтированную на ходовой части 2, грузовую стрелу 3 с полиспастом 4 и противовес- ной консолью 5, траверсу 6, подвешенную на канатах грузового полиспаста пирамидальной формы 7, опорно-поворотный круг 8, грузовую тележку 9. К грузовой тележке 9 жестко присоединена верхняя часть 10 поворотного механизма 11. К нижней опорной части 12 поворотного механизма 11 закреплены радиально расположенные в горизонтальной плоскости гидроцилиндры 13 двойного действия. Подвижные концы штоков 14 одной пары гидроцилиндров 15 жестко соединены между собой муфтой 16,
к которой прикреплен шаровой шарнир 17. К шаровому шарниру 17 прикреплен вертикальный гидроцилиндр 18. На его наружной поверхности в обхват установлен ползун 19, соединенный жесткими тягами 20 одинаковой длины посредством шарниров 21 и 22 со всеми остальными (четырьмя) штоками 23 гидроцилиндров 13.
Шток 24 вертикального гидроцилиндра 18 соединен при помощи силовых цилиндров 25, их штоков 26, рычагов 27, оси 28 вращения и опоры 29 с грузозахватным приспособлением 30. Грузозахватное приспособление 30 обеспечивает жесткий захват монтируемого элемента 31. На конец траверсы 6 одета электромагнитная катушка 32,
Кран-манипулятор работает следующим образом,
Траверса 6 из исходного положения подается в зону расположения строительных конструкций. При помощи ходовой части 2 и стрелы 3 грузозахватное приспособление 30 подводится к элементу 31 и автоматизи- рованно жестко захватывает его. Далее при помощи полиспастов 7 производится подъем траверсы 6 и одновременно с этим поворачивается стрела 3, грузовая тележка 9 подает ориентирующий орган и монтируемый элемент 31 на монтажный горизонт. Посредством поворотного механизма 11 производится разворот монтируемой конструкции 31 в горизонтальной плоскости.
Точное позиционирование осуществляется при помощи радиально расположенных а горизонтальной плоскости гидроцилиндров 13 и 15 двойного действия, ориентирующего вертикального гидроцилиндра 18 и ползуна 19. При их помощи выполняются следующие автоматизированные операции: линейные перемещения грузозахватного приспособления 30 с монтируемым элементом 31 вдоль двух взаимно перпендикулярных горизонтальных осей и угловые смещения относительно этих же осей,атакжевертикальные перемещения и круговые вращательные движения при постоянном и переменном радиусах. Вертикальные возвратно-поступательные движения получают при подаче рабочей жидкости в штоковую и по ршневую полости ориентирующего вертикального гидроцилиндра 18. Линейные перемещения осуществляют путем последовательного синхронного выдвижения штоков 14 одного и втягивания другого диаметрально противоположных гидроцилиндров 15 и одновременного втягивания двух других перпендикулярно расположенных штоков 23 гидроцилиндров 13.
Угловые перемещения во взаимно перпендикулярных направлениях и круговые вращательные движения при постоянном и переменном радиусах получают путем ком- бинации движений штоков гидроцилиндров 13 при подаче рабочей жидкости. Регулировка количества подаваемой жидкости в тот или иной цилиндры производится при помощи гидрораспределителя и золотнико- 0 вых устройств с управлением от микропроцессора (не показаны).
8 результате этого конец ориентирующего вертикального гидроцилидра 18 будет описывать заданные траектории движения. 5 Захват элемента 31 и его отцеп производится грузоохватными приспособлениями 30 от усилия гидроцилиндров 25, передаваемого штоками 26 и рычагами 27, закрепленных на оси вращения 28, и опоры 29. 0 Применение на конце траверсы 6 витков электропровода, намотанных в виде, катушки 32, и пропускание по ним электрического постоянного тока превращает конец траверсы 6 в сильный электромагнит. 5 При подключении катушки 32 к источнику постоянного тока траверса 6 своим концом притягивается к металлической части башни 1 крана, создавая эффект успокоения раскачивания, что обеспечивает повышен- 0 ную точность позиционирования.
Формула изобретения Кран-манипулятор, содержащий смонтированную на башне стрелу, связанную с ней грузовую тележку с горизонтальной по- 5 воротной платформой, на которой жестко закреплены корпуса горизонтальных силовых цилиндров, и связанный с одними из них одной своей частью направленный вниз силовой цилиндр, с другой частью которого 0 связан грузозахватный орган, отличающийся тем, что, с целью улучшения эксплуатационных характеристик путем повы- шения точности установки груза, он снабжен установленной на стреле с возмож- 5 ностью принудительного вертикального перемещения траверсой, на которой с возможностью перемещения вдоль нее установлена указанная грузовая тележка, горизонтальные силовые цилиндры установлены 0 попарно соосно с взаимно перпендикулярным расположением осей указанных пар и противоположным расположением штоков вых цилиндров в каждой паре, причем указанные штоки снабжены жесткими тяга- 5 ми, шзрнирно связанными с ними одними концами, дополнительный силовой цилиндр снабжен установленным на его корпусе с возможностью продольного перемещения ползуном, который шарнирно связан с другими концами указанных жестких тяг, а горизонтальные силовые цилиндры одной из указанных пар снабжены дополнительным штоком, связанным своими концами с внутренними концами штоков этих силовых цилиндров,
при этом дополнительный силовой цилиндр корпусом шарнирно связан со средней частью дополнительного штока, а своим штоком жестко - с грузозахватным органом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Крановая установка | 1986 |
|
SU1361103A1 |
| Кран-манипулятор для монтажа зданий из сборного железобетона | 1984 |
|
SU1203011A1 |
| КРАН-МАНИПУЛЯТОР | 2005 |
|
RU2312057C2 |
| КРАН-МАНИПУЛЯТОР | 2000 |
|
RU2167804C1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2274559C1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| Консольный кран для монтажапРОлЕТНыХ СТРОЕНий MOCTOB | 1979 |
|
SU812700A1 |
| Манипулятор для проведения грузовых работ | 1976 |
|
SU674970A1 |
| КРАН-ПОГРУЗЧИК (ВАРИАНТЫ) | 2006 |
|
RU2317248C2 |
| Кран-манипулятор | 1985 |
|
SU1271817A1 |



Изобретение относится к средствам роботизации для возведения многоэтажных крупнопанельных зданий. Цель изобретения - улучшение эксплуатационных характеристик путем повышения точности установки груза. Кран-манипулятор снабжен ориентирующим органом, выполненным в виде горизонтальных гидроцилиндров двойного действия, расположенных по радиусу опорной части поворотного механизма, и вертикального гидроцилиндра с ползуном на его наружной поверхности, установленного по оси, направленной в точку пересечения продольных осей горизонтальных гидроцилиндров, соединенного шарнирно с концами штоков одной пары противоположно расположенных гидроцилиндров, последовательно и соосно закрепленных торцами гильз с другой парой, и посредством жестких тяг одинаковой длины шарнирно - со всеми другими штоками. При этом траверса выполнена на всю длину стрелы, поворотный механизм присоединен к грузовой тележке, установленной на траверсе с возможностью горизонтального перемещения, а грузозахватное приспособление соединено со штоком вертикального гидроцилиндра. На конце траверсы смонтированы витки электропровода. 5 ил.
Фиг.1
/////////////// ////////////
22
Фиг.2
a vSX#ff S
Фиг. 4
12
23
CPU г. 5
| Кран-манипулятор | 1985 |
|
SU1271817A1 |
| кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
