Изобретение относиICH к антоматиза ции горно-шахтного оборудования и может быть использовано в других отраслях в качестве устройства для контроля выдвижш штоков гидродимкратов i-ы заданный ход.
Цель изобретения - повышение точности контроля ходэ штока гидродомкрага и снижение сил трения в устройстве,
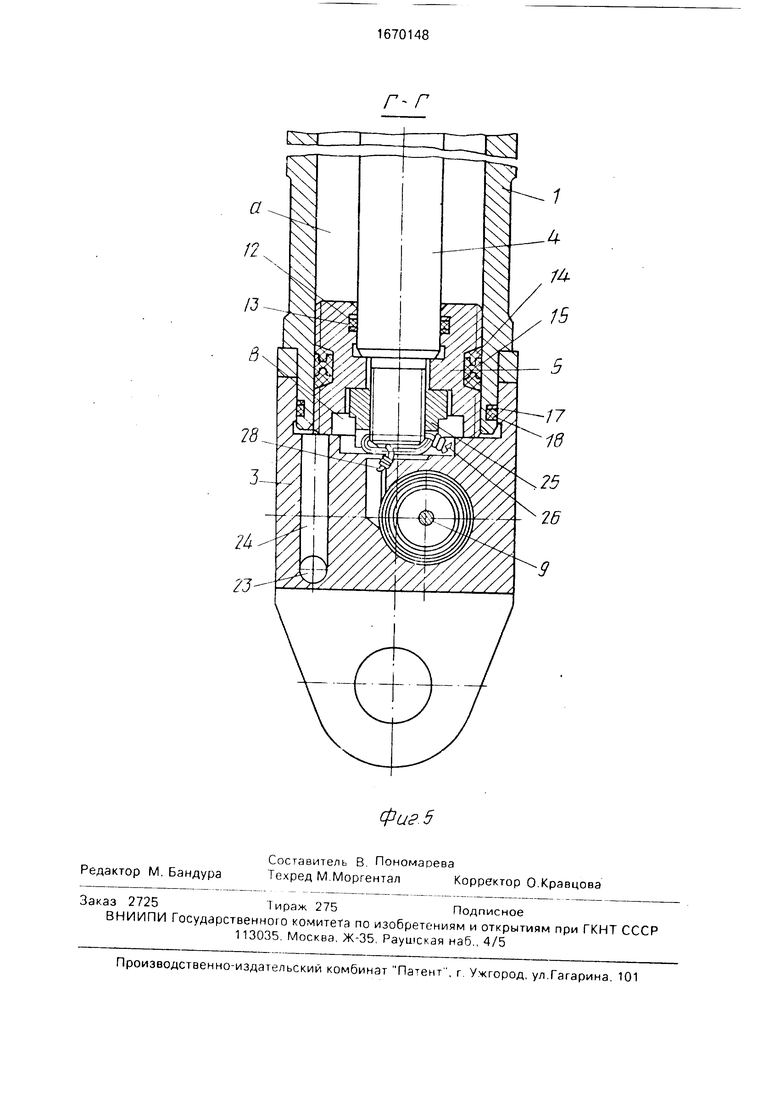
На фиг. 1 показан гидродомкрат горной машины с предлагаемым устройством, общий вид; на фиг, 2 - вид по стрелке А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 2: на фиг. 4 -- течение В-В на фиг. 2, на фиг. 5 - сечение Г-Г на фиг. 2.
Устройство включает в себя гидродомкрат 1. содержащий грундбуксу 2, днище 3, шток 4 с поршнем 5. В днище 3 установлены с одной стороны датчик 6, а с другой - механизм привода 7 датчика 6. Выходной вал 8 датчика 6 соединен с дополнительным валом 9 механизма привода 7 при помощи эластичной муфты 10. Рабочие поверхности штока 4, поршня 5, герметизированы уплотнителями 11-15, Днище 3 крепится к гидродомкрату 1 при помощи винтов 16 и герметизируется уплотнителями 17 и 18. Механизм привода 7 фиксируется в днище пробкой 19 и герметизируется уплотнением 20. Конец вала 9 герметизируется комплектом уплотнителей 21. Штоковая полость а гидродомкрата 1 соединяется с магистралью подвода при помощи гнезда 22, а поршневая полость б - при помощи гнезда 23. Гнездо 23 каналом 24 соединяется с поршневой полостью б гидродомкрата 1. Поршень 5 крепится к штоку 4 при помощи гайки 25 и контрится проволочным замком 26.
Механизм привода 7 датчика 6 состоит из барабана 27 с намотанным на его поверхности гибким элементом, например нитью (проволокой) 28. Один конец нити 28 укреплен на барабане 27. а другой - к замку 26 Барабан 27 штифтом 29 жестко закреплен на валу 9 Один конец вала 9 опирается на специальный комплект уплотнений 21, а другой установлен в подпятнике 30, расположенном в пробкр 19 На поверхности вала 9 выполнена несамотормозящая винтовая резьба (канавка) 31. На вал 9 одета втулка 32, которая через обойму 33 воспринимает усилие пружины 34, установленной ме кду обоймой 33 и барабаном 27 Втулка 32 снабжена отверстиями 35, в которые установлены шарики 36. Or проворота втулка 32 фиксирована шпоночными фиксаторами 37 размещенными в шпоночных пазах 38 На поверхности втулки 32 выполнены шлице- вые пазы 39.
Устройство работает следующим образом.
Если гнездо 23 соединить с напором а гнездо 22 со сливом то рабочая жидкость пс каналу 24 поступает в поршневую полост ь б и поршень 5 со штоком 4 начинает двигать ся При этом гибкая нить 28 сматывается с барабана 27 принудительно, так как один ее конец зацеплен за шток 4. Вращение бара бана 27 и. следовательно, вала 9 приводит во вращение вал 8 датчика 6 Полученные при этом сигналы по проводам (на чертеже не показано) передаются в электронную аппаратуру управления, где она обрабатывается, и в виде команды поступает в распределитель, который управляет поло стями гидродомкрата.
Конструктивно механизм привода 7 выполнен так, что втулка 32 может по шпоноч- ным пазам смещаться в осевом направлении, но не вращаться, а так как она
0
5
0
0
5
0
5
через шарики 36 соединена с валом 9, то при его вращении шарики 36, отслеживая винто вую резьбу 31, увлекают с собой втулку 32, и она через обойму 33. сжимая пружину 34, перемещается в сторону барабана 27 Одному обороту барабана 27 соответствует один шзг нарезки резьбы 31 Таким образом устройство взводится
По мере того, как выдвигаются шток 4, барабан 27, а следовательно датчик 6 выполняет соответствующее число оборотов, те в электронную систему управления будет передана определенная информация которая обрабатывается и в виде команды поступает в электрогидроблок (на чертеже не показано) для остановки штока 4 по мере выкода на заданный ход
При смене напора со сливом в полостях гидродомкрата шток 4 будет втягиваться и нить 28 будет нэмазваться на барабан 27 усилием пружины 34, действующим через обойму 33, втулку 32 и шарики 36 которые смещаясь к пробке 19 вдоль винтовой резьбы 31 заставляют вал 9 а с ним барабан 27 вращаться в обратную сторону что заставляет вращаться в обратную сторону вал 8 датчика 6, но в этом случае отсчет сигналов идет с . ном ччгравпении и они регист- pi/рую.оя ь электронной системе управления Таким образом происходит самоиозврпг механизма приподя 7
Для снижения слг трения меланизма привода 7 ото вал установлен в специальных подшипниках поп,г. тгник 30 и комплекте уплотнении 21 ii 1иющем ни кии коэффициент трения
Валы 8 и 9 соединяются между собой эластичной муфтой 10
Для снижее им сил трения повышения надежности работы механизм привода 7, вал 9 и чтулка 32 сочленены между собой шариками 36 которые вгиьзлены ь отверстия 35 выполненные на цилиндрической час и Bi/пси 32 Прп этом т.д ц -на стенки ьтулки гл/бина pc3i бы 31 практически равнн диам.мр ii рИ|)ь .6 Для четкого фиксирование ш ФНКТР н резьбе 31 предус- мотренг о бой мл V
С целью ойегпечонш самовозврата механизма привода 7 те скатывание нити 28 на барабан вращение Eianoa 8 и 9 винтовая резьба 31 выполнена в виде несамоюрмо зчщеи резьбы
Само возврату способглн/ет и то ч ,о он производится тогда когда в поршневой полости б гидродомкрата 1 пр тсутствует сливное давление что значи.льно снижает силы грения пала 9 в кимплекте уплотнений 21 Таким образом при ходе штоса 4 из идродомкрага 1 привода взводится, а при обратном ходе энергия взвода расходуется на привод датчика 6 и механизм привода 7
Для сборки нити 28 с замком 26 днище 3 располагают на расстоянии, примерно равном величине хода штока 4 Нить 28 вытягивают из механизма привода, соединяют с замком 26, после чего днище 3 соединяют с гидродомкратом 1 и закрепляют винтами 16. Для улучшения условий сборки длина нити 28 несколько больше величины хода штока 5 и, таким образом, на барабане 27 имеется несколько холостых витков
С целью уточнения длины нити 28 и обеспечения ее предварительного натяга пробка 19 вывертывается, снимается шпоночный фиксатор 37 и специальным инструментом через отверстие в горце втулки 32 и через шлиц в торцг вала 9 производится натяг нити 28 и установка втулки 32 на нужном расстоянии от барабана, после чего она фиксируется шпоночным фиксатором 37 Для этого на поверхности втулки 32 выполнены запасные шлицевы пазы 39, Втулка 32 и шпоночный фиксатор 37 фиксируются в шпоночных пазах 38 днища 3.
С целью сокращения габаритного раз ivicpa подлине гидридомкратэ 1 предлагаемый механизм привода 7 д1тчика 6 расползается перпендикулярно (.си гидре домкрата, ч для лучи о сматывЈния и на матьжания нити оси их не пересекаются
-la барабан 27 наслана длина нити 28 с запасом т о имеются холостые витки и рабочие. Предусмотрено, ч го для лучшей работы нити рабочая юн навивши эти, БИТКОВ была бы вблизи продольной оси, т е равномерно располагала - по обе ее стороны, а отверстие, соединившее расточку под устройство С POpUJHPFiOl1 ПОЛОСТЬЮ бы
диаметр больше чем размер рабочей на сивки и ось эюго отверстия совпадала бы, хотя и не обязательно, с осью гидродомкрата
С целью уменьшения габаритного размера устройства по длин пружин 34 располагается между барабаном 27 и втулкой 32.
Использования устройства позволяет резко повысить точность контроля хода, т.е.
обеспечить высокою точность контроля по- пожения штока при работе гидродомкрата. Кроме того, использование таких датчиков обеспечивает унификацию с другими отраслями.
ОФормула изобоетения
1. Устройство для контроля относительного положения элементов горной маишнь1, содержащее установленный на сдном из контролируемых элемен гов датчик с приво5 дом связью между подвижным и неподвижным элементами машины, отличающее- с я тем, что, с целыл повышения точности контроля относительного положения элементов машины, датчик выполнен в зиде
о датчика круговых перемещений с выходным валом, его привод Р в щс выполненного с подпятником корпуса и установленных в корпусе дополнительного рала поверхность которого выполнена с несамотормо5 зящей винтовой резьбой, один конец связан с выходным валом, а другой установлен в подпятнике, барабана, жестко закрепленного на дополнительном валу обоймы и установленной в обойме втулки, которая
дета нэ дополнительный нал с возможноС ью продольного перемещения относительно него при взаимодействии с его с пзьбой зафиксирована от поворота и подпружинена относительно бтрабанэ, а свяяь между подвижным и неподвижным элементами машины выполнен в виде г ибкого элс- мента намотанного на поперхность барабана, один конец которого закреплен на барабане а другой связан с другим кон- .рилируемым элементом
2 Устройство по г1 1, о т л и ч . ю щ е ес я тем. что оно снаб, шариками, которые установлены в радиальных отверстиях, выполненных на г. треннеи поверхности
ВтуЛКИ, С РОЗМОЖНРСТЬП F пТИМ ДРЙСТВИЧ С
резьбой дополнительнее рала г- счутрен1вй поверхностью и
л /1

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СВЕРЛЕНИЯ ОТВЕРСТИЙ ПОД ДАВЛЕНИЕМ УСО-70 | 2015 |
|
RU2603413C2 |
| Стенд для контроля осевого люфта конических подшипников вала редуктора с резьбовым хвостовиком и шпоночным пазом на конце | 1983 |
|
SU1163132A1 |
| Устройство для автоматической подналадки осевого инструмента | 1983 |
|
SU1117199A1 |
| Способ рихтовки прецизионных дисков и установка для его осуществления | 1987 |
|
SU1445836A1 |
| РУЧНОЕ УСТРОЙСТВО ДЛЯ МАРКИРОВКИ ИЗДЕЛИЙ | 1996 |
|
RU2116149C1 |
| Плавучая платформа | 1981 |
|
SU988971A1 |
| Винтовой пресс | 1989 |
|
SU1646892A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ИЗДЕЛИЙ | 1992 |
|
RU2021092C1 |
| ШТАМП-АВТОМАТ | 2003 |
|
RU2261153C2 |
| Генератор капель | 1977 |
|
SU686816A1 |

Изобретение относится к автоматизации горно-шахтного оборудования и может быть использовано в других отраслях хозяйства в качестве устройства для контроля выдвижки штоков гидродомкратов (ГД) на заданный ход. Цель изобретения - повышение точности контроля хода штока ГД и снижение сил трения в устройстве. Устройство включает датчик (Д) 6 круговых перемещений с механизмом привода 7. Выходной вал 8 Д 6 соединен с дополнительным валом 9 механизма привода 7 при помощи эластичной муфты 10. Механизм привода 7 Д 6 состоит из барабана 27 с намотанными на его поверхность гибким элементом, например проволокой 28. Барабан 27 жестко закреплен на валу 9. Один конец вала 9 опирается на комплект уплотнений 21, а другой установлен в подпятнике 30. На поверхности вала 9 выполнена несамотормозящая винтовая резьба 31. На вал 9 одета втулка 32, которая подпружинена и имеет возможность продольного перемещения относительно вала 9 при взаимодействии с его резьбой 31. По мере того, как выдвигается шток, барабан 27, а следовательно, Д 6 выполняет соответствующее число оборотов. В систему управления передается определенная информация, которая обрабатывается и в виде команды поступает в электрогидроблок для остановки штока по мере выхода на заданный ход. 1 з.п. ф-лы, 5 ил.
г 4
5-6
9 Я
Фиг г
U
фиг.З
В-в
33
-59
фигЬ
а
ft
г-г
| Устройство управления гидроцилиндрами для механизированных крепей | 1980 |
|
SU1132794A3 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
