Изобретение относится к машиностроению, в частности к средствам гидропневмоавтоматики и может быть использовано для позиционирования рабочих органов технологических машин, например, при подаче гипсокартонных изделий в сушило и извлечении их из него.
Целью изобретения является повышение надежности и упрощение конструкции гидропривода.
На фиг. 1 представлена принципиальная гидравлическая схема гидропривода, включенного в технологические линии для производства гипсокартонных изделий; на фиг. 2 - принципиальная гидравлическая схема механизма автоматического позиционирования и привода автоматической настройки расхода.
Многопозиционный гидропривод содержит насос 1, подключенные магистралями 2 и 3 слива и нагнетания к исполнительным гидродвигателям 4-8 через гидрораспределители 9-13, и направляющий гидрораспределитель 14 и программное устройство 15, включающее гидродвигатель 16 (фиг. 2), кинематически связанный с профилированными кулачками 17, каждый из которых контактирует с одним из гидрораспределителей 9-13, регулируемый дроссель 18 с регулятором 19 и напорный клапан 20 и два дозатора 21, 22. Дозатор 21 выполнен в виде установленного в корпусе 22 с образованием управляющих полостей 23 и 24 поршня 25, кинематически связанного посредством рейки 26 и шестерни 27 с регулируемым дросселем 18. Полость 23 подключена через регулируемый дроссель 28 к магистралям 2 и 3 слива и нагнетания через гидрораспределитель 14 и к магистрали 2 слива через напорный клапан 29, а полость 24 - непосредственно к магистрали 3 нагнетания.
Для предохранения системы от перегрузок в схему включен предохранительный клапан 30, а для контроля давления - манометр 31с гидрораспределителем 32,
Электромагнит 33 гидрораспределите- ля 14 связан с датчиком 34, который установлен в линии изготовления гипсокартонных изделий 35 между подающим рольгангом 36 и укладчиком 37, при помощи которого изделия 35 подаются в тот или иной ярус рольгангов 38 сушила, каждый из которых взаимодействует с соответствующим гидродвигателем 4-8. Дозатор 22 выполнен в виде установленного в корпусе 39 с образованием управляющей и возвратной полостей 40-42 сдвоенного поршня 43. Полость 40 подключена непосредственно к гидродвигателю 16, а полость 41 - через
напорный клапан 22, управляющий вход 44 которого сообщен с линией 45 направляющего гидрораспределителя 14, подключенной к возвратной полости 42, дросселю 18с
регулятором 19 и управляющей полости 23 дозатора 21. Линия 46 гидрораспределителя 14 подключена через обратный клапан 47 к полости 41, а линии 48 и 49 соответственно к магистралям 2, 3 слива и нагнетания.
Многопозиционный гидропривод работает следующим образом.
Поступающее на подающий рольганг 36 изделие 35 нажимает на датчик 34, включающий электромагнит 33 гидрораспределителя 14, который переключается. При этом рабочая жидкость от насоса 1 подается через линии 45 и 49 гидрораспределителя 14. дроссель 18 с регулятором 19 к гидрораспределителям 9-12. Одновременно рабочая
жидкость поступает в управляющую полость 23 дозатора 21, поршень 25 которого, перемещаясь влево (по чертежу) открывает дроссель 18. Кроме того, рабочая жидкость поступает в возвратную полость 42 дозатора 22. При этом жидкость из управляющей полости 41 поступает через открытый клапан 20 в гидродвигатель 16.
Вращаясь, гидродвигатель 16 одним из кулачков 17 нажимает на ролик (не обозначен), гидрораспределителя 9, после чего начинает вращаться гидродвигатель 4 верхнего яруса (по чертежу) рольгангов 38, на который поступает через укладчик 37 изделие 35. Датчик 34, пока изделие проходит
через укладчик 37 и перемещается по рольгангу 38 верхнего яруса, не снимает сигнала с электромагнита 33 и гидрораспределителя 14. Так как дроссель 18 открывается постепенно, гидродвигатель 4 начинает вращаться не с максимальной скорости, а с разгоном. Когда изделие 35 поступило в сушило, сигнал от датчика 34 снимается с электромагнита 33 гидрораспределителя 14, который возвращается в исходную позицию. При этом полости 23 и 42 дозаторов 21 и 22 сообщаются с магистралью 2 слива по линиям 45 и 48, а их поршни 25 и 43 перемещаются в исходные положения под действием давления рабочей жидкости в
полостях 24 и 41, подключенных по линиям 46 и 49 к магистрали 2 нагнетания. Проводимость дросселя 18 уменьшается. При перемещении поршня 43 вверх (по чертежу) рабочая жидкость из управляющей полости
5 40 поступает к гидродвигателю 16, который, поворачиваясь, убирает один из кулачков 17 с ролика гидрораспределителя 9, устанавливая его в исходную позицию. Рольганг 38 верхнего яруса останавливается.
При подходе следующего изделия 35 к датчику 34 цикл повторяется, но уже укладчик 37 подает изделие 35 на последующий нижний (по чертежу) ярус рольганга 3.Далее происходит следующее.
К гидродвигателю 16 вновь подается порция рабочей жидкости от дозатора 22, который следующим кулачком 17 нажимает на ролик гидрораспределителя 10, который переключается. Жидкость подается к гидро- двигателю 5 через постепенно открывающийся дроссель 18. После того как изделие 35 поступило в сушило, а с датчиком 34 взаимодействует следующее изделие 35, укладчик подает изделие уже на последующий нижний ярус рольгангов 38, и так далее.
Когда же укладчик 37 подает изделие 35 на самый нижний ярус, он начинает подавать изделие 35 опять на самый верхний ярус. Одновременно с этим многопозицион- ный гидропривод попеременно через свои гидрораспределители 9-13 подает рабочую жидкость к соответствующим гидродвигателям 4-8.
Предлагаемый многопозиционный гид- ропривод дает возможность оборудованию работать в автоматическом режиме, надежно и с достаточной степенью быстродействия, что неизбежно ведет к повышению производительности.
Технико-экономическая эффективность от использования предложенного гидропривода заключается в увеличении срока службы и расширении области применения оборудования технологических машин. Формула изобретения Многопозиционный гидропривод, содержащий по меньшей мере два исполнительных гидродвигателя, подключенные к магистралям слива и нагнетания через направляющий гидрораспределитель и программное устройство, включающее гидродвигатель, кинематически связанный с профилированными кулачками, регулируемый дроссель с регулятором и напорный клапан, подключенные к двум дозаторам, каждый из которых выполнен в виде установленного в корпусе с образованием управляющих полостей поршня, отличающийся тем, что, с целью повышения надежности и упрощения конструкции, поршень одного из дозаторов кинематически связан с регулируемым дросселем, а управляющие полости второго дозатора подключены к гидродвигателю программного устройства, причем одна из них - непосредственно, а вторая - через напорный клапан, управляющий вход которого сообщен с одной из линий направляющего гидрораспределителя.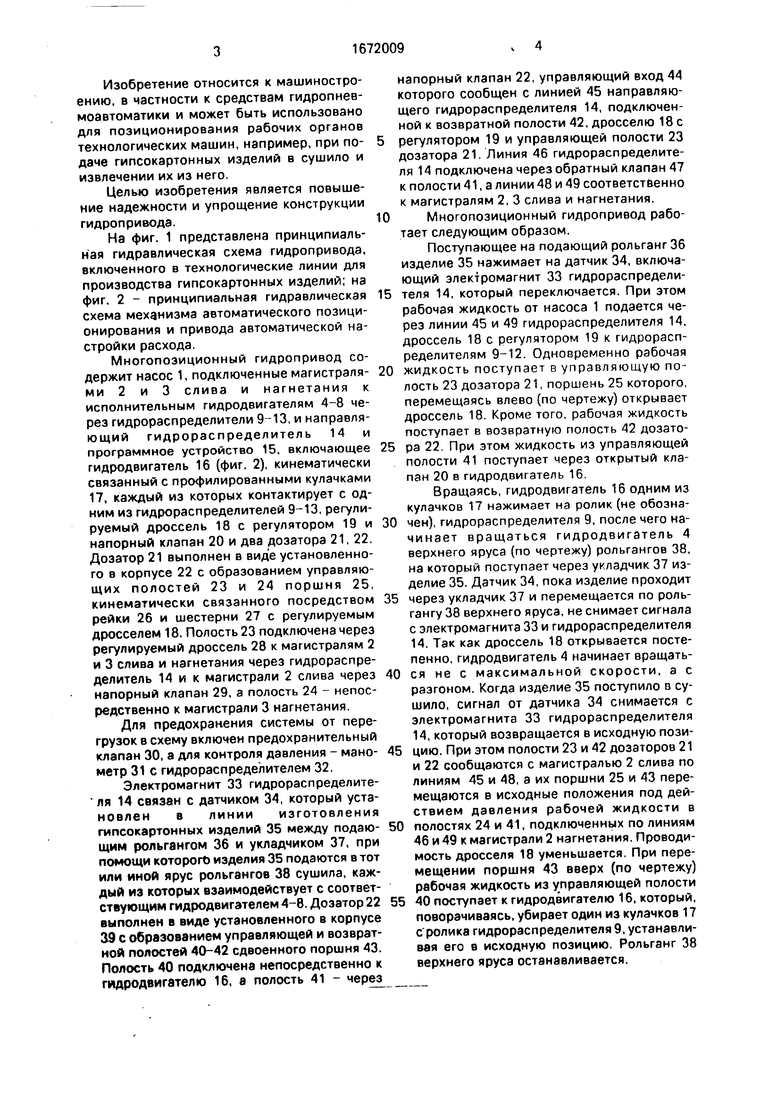
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочее оборудование землеройной машины | 1987 |
|
SU1479581A1 |
| Камнерезная машина | 1989 |
|
SU1703820A1 |
| БУРИЛЬНАЯ МАШИНА | 1994 |
|
RU2084626C1 |
| Гидропривод | 1985 |
|
SU1343125A1 |
| ГИДРОПРИВОД ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ДВУСТОРОННЕГО ДЕЙСТВИЯ | 2001 |
|
RU2211966C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОВЫМ ГИДРОПРИВОДОМ | 1992 |
|
RU2025577C1 |
| Шаговый гидропривод | 1989 |
|
SU1672007A1 |
| Гидравлическая бурильная машина | 1987 |
|
SU1470950A1 |
| Гидропривод стрелового крана | 1986 |
|
SU1359247A1 |
| ГИДРАВЛИЧЕСКАЯ ГОЛОВКА | 1991 |
|
RU2090785C1 |
Изобретение м.б. использовано для позиционирования рабочих органов технологических машин. Цель изобретения - повышение надежности и упрощение конструкции гидропривода. Многопозиционный гидропривод содержит два дозатора (Д) 21, 22, которые соответственно связаны с регулируемым дросселем (РД) 18 и гидродвигателем (ГД) 16. При переключении гидрораспределителя (ГР) 14 поршень (П) 25 Д 21 перемещается влево по чертежу, плавно увеличивая проводимость РД 18. Одновременно рабочая жидкость из управляющей полости 41 через открытый напорный клапан 20 поступает в ГД 16, который вращает профилированные кулачки (К) 17, взаимодействующие с одним из ГР, например 9. ГД 4 плавно увеличивает частоту вращения. По окончании технологического цикла ГР 14 устанавливается в исходную позицию. При этом уменьшается проводимость РД 18, а рабочая жидкость из П 40 поступает в ГД 16, который, поворачивая К 17, переключает ГР 9 в исходную позицию, подготавливая для включения последующие ГР к работе. 2 ил.
35
/
8
22
15 30
| Гидропривод манипулятора | 1976 |
|
SU817331A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
