тикальных направляющих основания. При своем перемещении корпус вследствие взаимодействия шарнирно установленных на нем роликов 3 с указанными направ- ляющими перемещается вверх или вниз и одновременно поворачивается на некоторый угол. Направляющее 22, воздействуя на ролики оси 5 приводят в действие основное звено и весь механизм стрелы. Груз при этом поднимается либо опускается, В крайних точках зоны обслуживания достигается уравновешивание благодаря повороту корпуса с направляющими 22, Управление приводом осуществляется оператором со стороны головки 19, 4 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1985 |
|
SU1371899A1 |
| Манипулятор | 1980 |
|
SU935450A2 |
| Манипулятор | 1982 |
|
SU1085805A1 |
| Кран-манипулятор | 1976 |
|
SU614015A1 |
| Стенд для испытания манипуляторов | 1988 |
|
SU1653948A1 |
| Погрузочный манипулятор | 1980 |
|
SU906934A1 |
| Способ замены грузозахватных приспособлений самоуравновешивающегося манипулятора | 1986 |
|
SU1648888A1 |
| Манипулятор | 1978 |
|
SU685614A1 |
| Подъемник-манипулятор с уравновешиванием груза (его варианты) | 1984 |
|
SU1225805A1 |
| Манипулятор | 1988 |
|
SU1549747A1 |
Изобретение относится к подъемно-транспортному машиностроению, а именно к манипуляторам, предназначенным для погрузочно-разгрузочных работ. Цель изобретения - улучшение условий труда оператора за счет уравновешивания стрелы на границах зоны обслуживания. При включении привода 7 вертикального перемещения руки выходное звено 8 воздействует на корпус 1, установленный в первых 5 и вторых 6 вертикальных направляющих основания. При своем перемещении корпус вследствие взаимодействия шарнирно установленных на нем роликов 3 с указанными направляющим перемещается вверх или вниз и одновременно поворачивается на некоторый угол. Направляющие 22, воздействуя на ролики оси 15, приводят в действие основное звено и весь механизм стрелы. Груз при этом поднимается либо опускается. В крайних точках зоны обслуживания достигается уравновешивание благодаря повороту корпуса с направляющими 22. Управление приводом осуществляется оператором со стороны головки 19. 4 ил.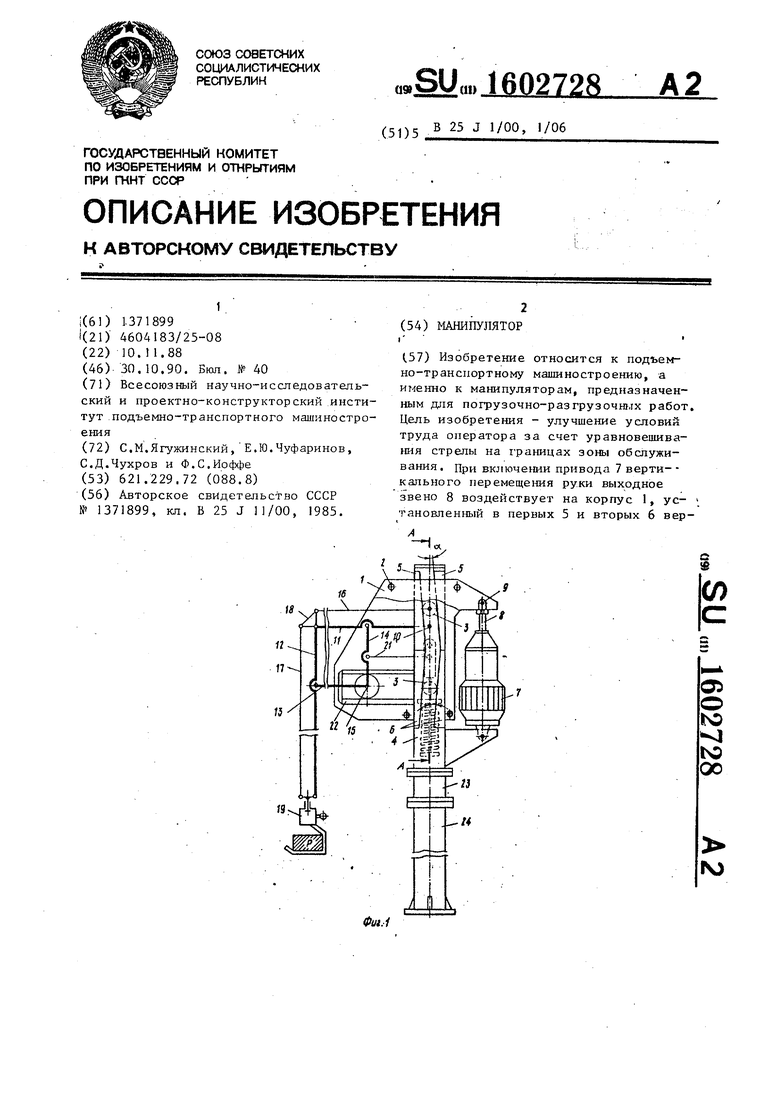
Изобретение относится к подъемно- paHCiioijTHOMy машиностроению, а имен- 15 о к манипуляторам, тфедназначенным ля погрузочно-разгрузочных работ.
Цель изобретения - улучшение усовий труда оператора за счет уравновешивания стрелы на границах зоны 20 обслуживания.
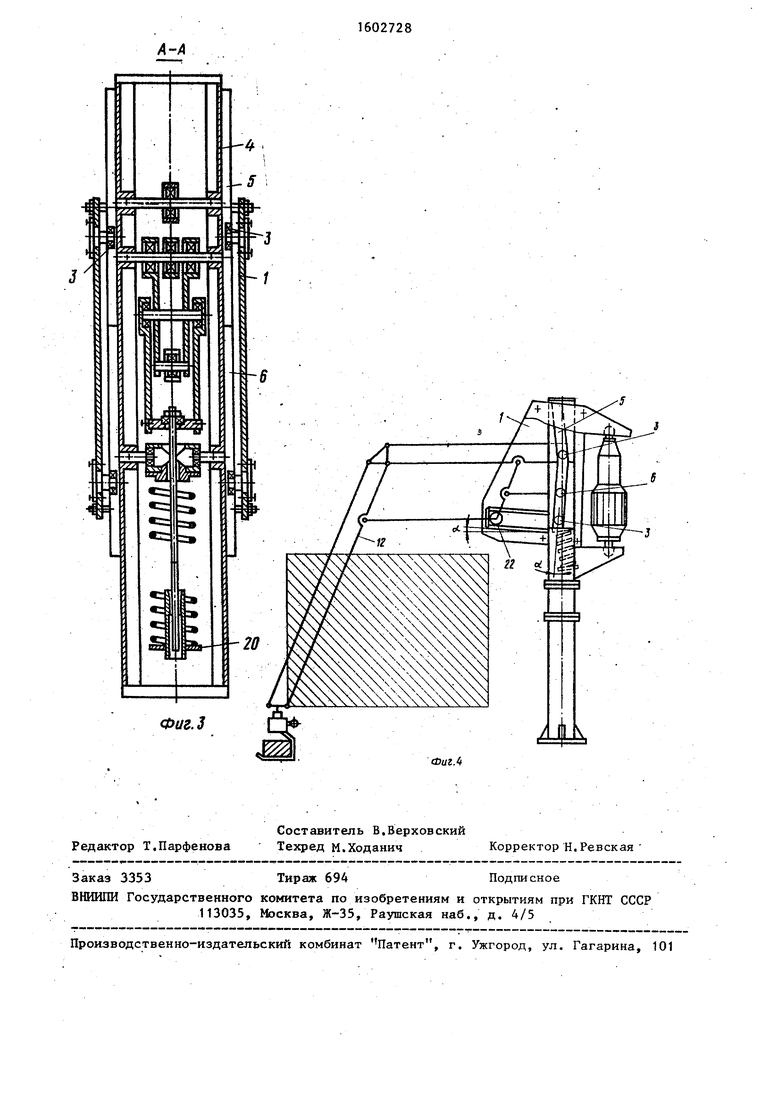
На фиг, 1 изображен предлагаемый манипулятор с вертикальным положением руки его стрелы, общий вид; на фиг,2 - то же, с рукой, отклоненной от верти- 25 кали, в крайней верхней точке зоны обслу , живания; на фиг,3 разрез А-А на фнг, 1; на фиг, 4 - манипулятор с рукой, отклоненной от вертикали, в крайней нижней точке зоны обслуживания, зо
Манипулятор содержит корпус 1, состоящий из двух щек, соединенных шпильками 2 с двумя роликов 3, установленный на основании 4, на, котором закреплены вертикальные направ- ляющие, причем рблики 3 корпуса 1 раз- мещены в вертикальных направляющих. Первые 5 и вторые б вертикальные нап- равлякпцие не параллельны между собой и расположены под углом к вертикаль- дд ной оси основания 4 манипулятора. На кронштейне основания 4 закреплен привод 7 вертикального перемещения руки с выходным звеном.8, например пневмо- цилиндр. Выходное звено В перемещает 45 корпус 1 манипулятора, воздействуя на него через ось 9, На основании 4 на оси 10 установлена стрела, выполненная в виде рычажного параллелограм- много механизма, который состоит из . Q основного звена П, руки 12, звена 13, противолежащего основному звену, и бокового звена 14, Звенья 13 и 14 соединены осью 15, снабженной роликами. Все звенья рычажного параллело- граммного механизма шарнирно соедине- ны между собой и с основанием 4 подшипниковыми узлами, снижагадими трение.
Параллелограммный механизм имеет транслятор, состояшдй из тяг 16 и 17 и серьги 18, позволяющих сохранить вертикальное положение головки 19 охвата, на которой закреплен груз, В основании 4 расположен уравновешивающий пружинный механизм 20, взаимодействующий со стрелой манипулятора посредством тяги 21, Корпус манипулятора имеет горизонтальнь1е направляющие 22, по которым перемещается ось 15 с роликами. Основание 4 установлено на опорно-поворотном устройстве 23, закрепленном на напольной поддерживающей конструкции, например, в виде колонны 24. При необходимости манипулятор может быть скомпонован в подвесном варианте.
Манипулятор работает следующим образом.
При включении привода 7 вертикального перемещения руки 12 его выходное звено 8 воздействует через ось 9 на корпус 1 манипулятора и перемещает его ролики 3 по вертикальным направляющим (фиг, 2), Направляющие 22 воздействуют на ролики с осью 15, которая через боковое звено 14 приводит в действие основное звено 11, руку 12 и далее весь механизм стрелы. При этом верхний ролик 3 перемещается по направляющим 5, а ьшжш-ш ролик 3 - по направляюшдм 6, Груз поднимается. При этом корпус 1 с горизонтальными направляющими 22 поворачивается против часовой стрелки на угол ьб , что позволяет устранить частичную разбалан- сировку манипулятора в верхних крайних точках зоны обслуживания.
При опускании ролики 3 (фиг, 4) (верхний и нижний) перемещаются по тем же направляющим 5 и 6, В результате опуCISания руки 12 в нижнюю точку зоны обслуживания корпус 1 с горизонтальными направляющими 22 поворачиваются по часовой стрелке на
угол об I что позволяет устранить частично разбалансировку манипулятора в нижней точке зоны обслуживания.
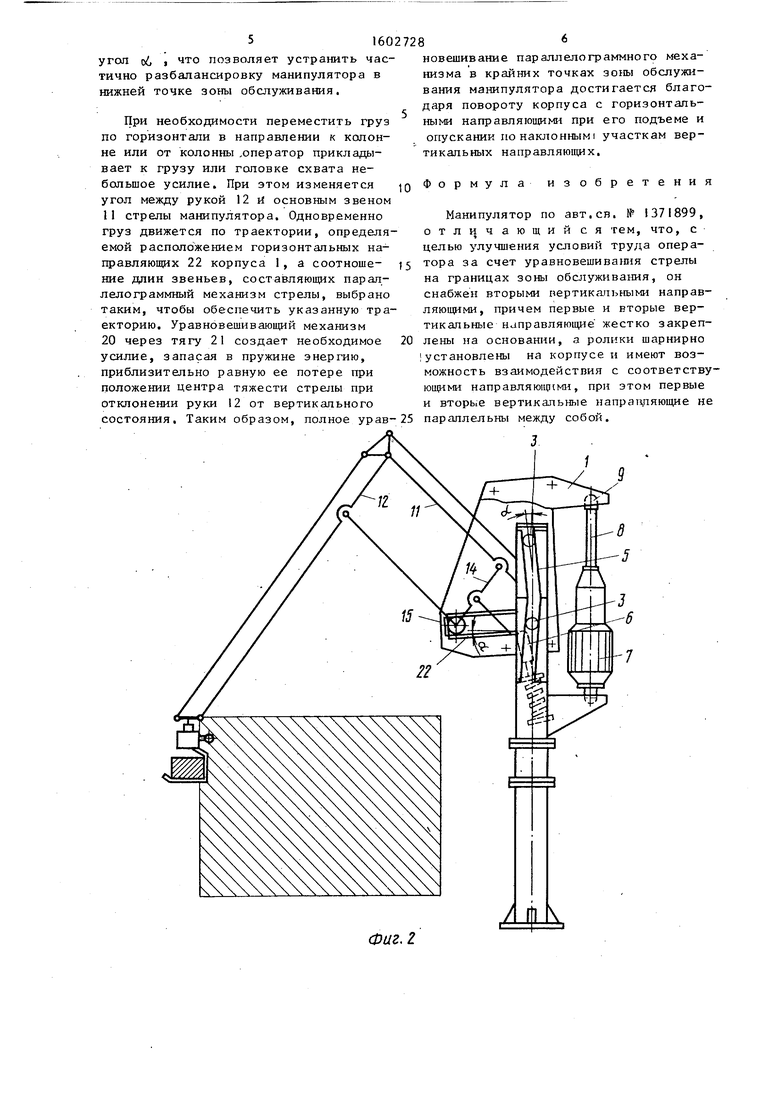
При необходимости переместить груз по горизонтали в направлении к колонне или от колонны ,оператор прикладывает к грузу или головке схвата небольшое усилие. При этом изменяется угол между рукой 12 и основным звеном 11 стрелы манипулятора. Одновременно груз движется по траектории, определяемой расположением горизонтальных направляющих 22 корпуса 1, а соотноше- ние длин звеньев, составляющих парал- лелограммный механизм стрелы, выбрано таким, чтобы обеспечить указанную траекторию. Уравновешивающий механизм 20 через тягу 21 создает необходимое усилие, запасая в пружине энергию, приблизительно равную ее потере при положении центра тяжести стрелы при отклонении руки 12 от вертикального
состояния. Таким образом, полное урав-25 параллельны между собой.
5
новешивание параллелограммного механизма в крайних точках зоны обслуживания манипулятора достигается благодаря повороту корпуса с горизонтальными направляющими при его подъеме и опускании по наклонным участкам вер- тикапьных направляющих.
Формула изобретения
Манипулятор по авт.св. № 1371899, отли ч ающий ся тем, что, с целью улучшения условий труда оператора за счет уравновешивания стрелы на границах зоны обслуживания, он снабжен вторыми пертикапьными направ- ляюш;ими, причем первые и вторые вертикальные направляющие жестко закреплены на основании, а ролики шарнирно установлены на корпусе и имеют возможность взаимодействия с соответствующими направляю11р(ми, при этом первые и вторые вертикальные напраидяющие не
0
Фиг, 2
ФигЛ
| Манипулятор | 1985 |
|
SU1371899A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
