(54) ПНЕВМАТИЧЕСКИЙ ЗАХВАТНЫЙ ОРГАН ДЛЯ ПЛОСКИХ ДЕТАЛЕЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический захватный орган | 1981 |
|
SU988425A1 |
| Пневматический захватный орган | 1982 |
|
SU1103926A1 |
| Вакуумный захватный орган | 1981 |
|
SU1107936A1 |
| Вакуумный захватный орган | 1981 |
|
SU963639A1 |
| Вакуумный захватный орган | 1981 |
|
SU1005996A1 |
| Вакуумный захватный орган для плоских заготовок | 1983 |
|
SU1110528A1 |
| Вакуумный захватный орган | 1981 |
|
SU1011308A1 |
| Вакуумный захватный орган | 1977 |
|
SU644579A1 |
| Устройство для поштучного отделения плоских заготовок от стопы | 1988 |
|
SU1569062A1 |
| ОЧУВСТВЛЕННЫЙ ВАКУУМНЫЙ ЗАХВАТ | 2005 |
|
RU2283751C1 |
1
Изобретение относится к автоматизации технологического процесса обработки деталей и может .быть использовано в устройствах для поштучной выдачи плоских деталей из бунйера.
Известен захватный орган, содержаший закрепленный в держателе, подвижном в осевом направлении, корпус с присоской для захвата плоской детали, выполненной с полостью, которая соединена с отверстием с полостью, в присоске, а также содержащий механизм разгерметизации, размещенный в полости корпуса и приводимый в движение через качающийся рычаг, шарнирно закрепленный в корпусе. Захватный орган содержит также двуплечий рычаг, шарнирно закрепленный в держателе с возможностью взаимодействия одним концом с качающимся рычагом, а другим - с устройством для дальнейшего перемещения, а механизм разгерметизации , выполнен в виде входя1цего в отверстие подпружиненного стержня с пазом, в котором расположен один конец качающегося рычага 1..
Недостатком известного захватного органа является сложность конструкции.
Известен также захватный орган, содержащий полый корпус с присоской, закрепленной в держателе, подвижном в направлении, перпендикулярном поверхности захватываемой детали, и расположенный в кор5 пусе подвижный в направлении движения держателя шток, двуплечий рычаг, установленный на оси в держателе с возможностью взаимодействия одним концом с установленным на пути движения держателя непод Q вижным упором и шарнирно связанным другим концом со штоком, снабженным поршнем, размещенным в выполненной для этого в корпусе цилиндрической полости, соединенной отверстием с полостью присоски, а также пружиной, действующей на пор15 шень в направлении, обратном направлению движения держателя 2.
Недостатками известного захватного органа являются сложность конструкции и большие габариты.,
Наиболее близким к предлагаемому по
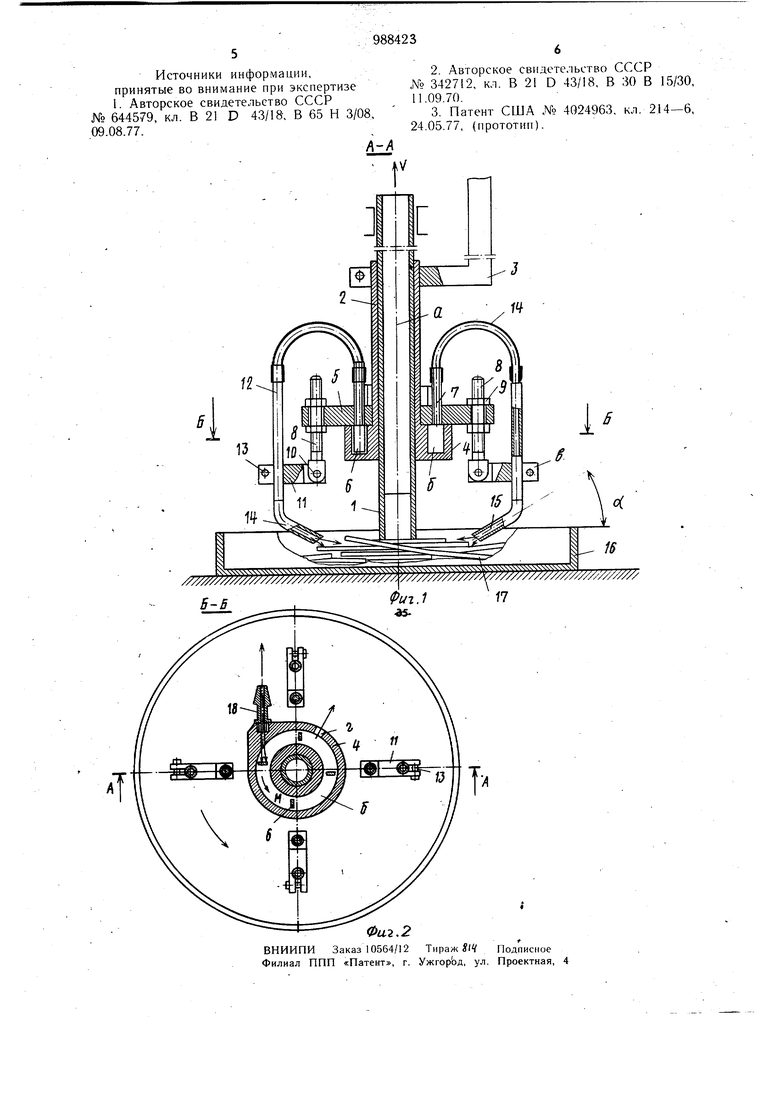
20 технической сущности и достигаемому эффекту является пневматический захватный орган для плоских деталей, содержащий установленный в подвижном держателе полый корпус, взаимодействующий рабочей плоскостью с деталью и связанный с пневмосистемой, механизм разделения деталей, включающий в себя по меньшей мере одно сопло 3. Недостатком известного пневматического захватного органа является низкая надежность работы. Цель изобретения - повышение надежности работы. Поставленная цель достигается тем, что в пневматическом захватном органе для плоских деталей, содержащем установленный в подвижном держателе полы; корпус, взаимодействующий рабочей плоскостью с деталью и связанный с пневмосистемой, механизм разделения деталей, включающий в себя по меньшей мере одно оопло, выполнен в виде закрепленной на корпусе втулки с кольцевым пазом, связанны.м с пневмосистемой, диска, установленного, на втулке с возможностью поворота относительно нее и несущего лопатки, перемещающиеся по пазу, снабжен дополнительными соплами, и сопла закреплены на диске по окружности и расположены под углом к рабочей плоскости корпуса. Корпус выполнен в виде трубки, установленной в держателе с возможностью перемещения относительно него. На фиг. 1 схе.матически изображен предлагаемый пневматический захватный орган (разрез А-А на фиг. 2); на фиг. 2 - разрез 15 - Б на фиг. 1. Пневматический захватный орган содержит корпус, выполненный в виде вертикально расположенной трубки 1, расположенной во втулке 2 (трубке) с возможностью перемещения в ней. Канал а трубки 1 связан с источником вакуума (не показан). Втулка 2 закреплена в подвижном держателе 3. Втулка 2 выполнена с фланце.м 4, в котором со стороны держателя 3 выполнена кольцевая канавка б закрытая сверху диском 5, установленным на втулке 2. На диске 5 закреплены лопасти 6, входящие в канавк б щтуцера 7, и винты 8 с гайками 9. На нижних концах винтов 8 при помощи осей 10 шарнирно закреплены планки 11с пазами в выполненными на их свобод ных концах, в пазах в закреплены трубки 12при помощи винтов 13. Верхние концы трубок 12 связаны с верхними концами штуцера 7, гибкими шлангами 14. На нижних концах трубок 12 закреплены сопла 15, расположенные под углом с, к горизонтальной плоскости (к рабочей поверхности трубки 1). Под трубкой 1 расположен бункер 16 для размещения деталей 17. На фланце 4 закреплен штуцер 18, связывающий полость канавки б с сетью сжатого воздуха. Полость канавки б соединена также через отверстие г, выполненное во фланце 4, с атмосферой. Пневматический захватный орган работает следующим образом./ При взаимодействии нижнего торца трубки I с деталями 17, расположенными в бункере16, в канале а создают разряжение. Одна из деталей прижимается к торцу трубки ,1, перекрывая канал а. Сжатый во.здух из сети через штуцер 18 поступает в полость канавки б, воздействует на лопасти 6 и приводит во вращательное движение диск 5 вокруг втулки 2, а затем выходит через отверстие г в атмосферу. Одновременно сжатый воздух из полости канавки б через щтуцер 7, гибкие щланги 14 и трубки 12 поступает в сопла 15. Сжатый воздух из сопел 15 в пульсирующем режиме поступает под деталь 17, прижатую к торцу трубки 1. Под этой деталью 17 образуется зона пониженного давления, обеспечивающая отрыв нижележащих деталей 17 от прижатой детали 17 к торцу трубки 1 и дополнительное усилие прижатия детали 17 к торцу трубки 1. При перемещении держателя 3 вверх совместно с трубкой 1 и втулкой 2, диском 5 с трубками 12, деталь 17 ориентируется относительно трубки 1, а затем подача сжатого воздуха в полость канавки б прекращается. Диск 5 останавливается. Детали 17 имеют размер в плане 60x40 мм и толщиной 0,3-1,2 мм. Эффект от иснользования предлагаемого пневматического захватного органа заключается в повышении надежности работы. Формула изобретения 1.Пневматический захватный орган для плоских деталей, содержащий установленный в подвижном держателе полый корпус, взаимодействующий рабочей плоскостью с деталью и связанный с пневмосисте.мой, механизм разделения деталей, включающий в себя по меньшей мере одно сопло, отличающийся тем, что, с целью повышения надежности работы, механизм разделения выполнен в виде закрепленной на корпусе втулки с кольцевым пазом, связанным с пневмосистемой, диска, установленного на втулке с возможностью поворота относительно нее и несущего лопатки, перемещающиеся по пазу, снабжен дополнительными соплами, и сопла закреплены на диске по окружности и расположены под углом к рабочей плоскости корпуса. 2.Пневматический захватный орган по п. 1, отличающийся тем, что корпус выполнен в виде трубки, установленной в держателе с возможностью осевого пере.мещения относительно него.
