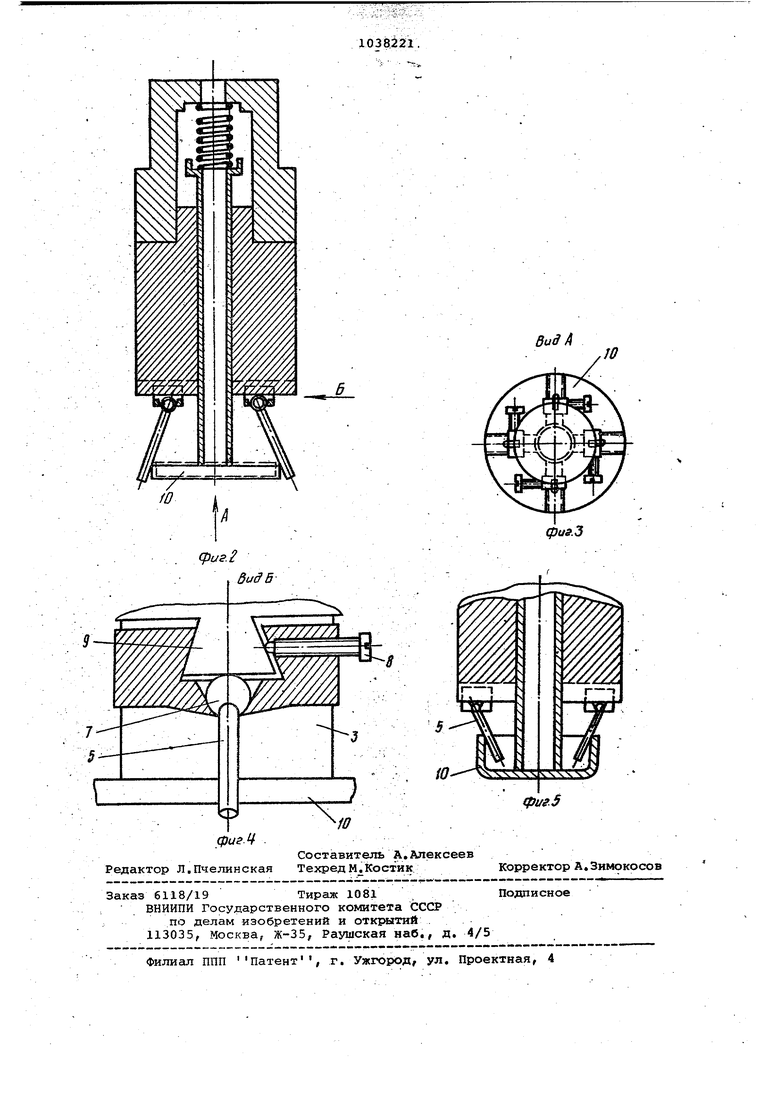
Изобретение относится к устройствам для транспортирования деталей в зону обработки или сборки и может быть использовано в любой отрасли машиностроения и .прибОЕ)ОСТроения. Известен схват, содержащий фиксаторы и корпус с полостью, связанной с источником вакуума ij. Недостатком известного схвата является низкая точность .базировани Цель изобретения - повышение точ нести базирования. . Поставленная цель достигается тем, что вакуумный схват, содержащий фиксаторы и корпус с полостью, связанной с источником вакуума,снаб жен ползунами и подпружиненной втул кой, размещенной в полости корпуса таким образом, что ее нар ужный торе выступает над фиксаторами, при этом ползуны размещены в направляющих корпуса, а фиксаторы соединены с по зунами шарнирами и с возможностью и стопорения. На фиг. 1 изображён схват в исходном положении без детали; на фиг. 2 - то же, с захваченной деталью; на фиг, 3 - вид А на фиг. 2 на фиг. 4 - вид Б на фиг. 2 ; на фиг. 5 - схват, переналаженный для базирования деталей по внутреннему контуру. Baкysмный схват содержит крьпику пружину 2, втулку 3, установленную подвижно в корпусе 4, фиксаторы 5, соединенные с ползунами 6 сферичес ми- шарнирами 7, стопорные-винты8 и стопорящие фиксатоги с ползунами направляющих 9. Схват работает следующим образом В исходном положении втулка 3 н ходится на расстоянии (фиг. 1) от захватываемой детали 10. На нижний торец втулки воздействует разность давлений U.P междУ атмосферным давле .нйем и давлением внутри корпуса сх та, стремящаяся втянуть втулку 3 в корпус схвата, однако вес втулки и усилие предварительной деформации пружины 2 не позволяют втулке подн ,ся,. . При соприкосновении торца втулки 3 с деталью 10 разность давлений лР между атмосферным давлением и давлением внутри корпуса захвата возрастает, так что перекрывается отверстие втулки, а также увеличивается площадь, на которую воздействует разность давлений U Р/ и становится равной площади. ограниченной наружной поверхностью подвижной втулки 3. В результаГе ; втулка 3 втягивается в корпус 4, а деталь 10, прижатая к торцу втулки, своим базовым контуром упирается в базирующие поверхности.фиксаторов 5. Если в момент соприкосновения . . детали со втулкой 3 оси детали и втулки не совпадали, то деталь прижимается к последней за счет раз- ности давлений несцентрированной.. Во время перемещения втулки с прижатой к ее торцу деталью последняя соприкасается/ например, с наклонными поверхностями фиксаторов 5 и смещается в горизонтальной плоскости до соприкосновения базового контура детали с базирующими поверхностями всех фиксаторов, обеспечивая тем самым точное базирование (фиг. 2). Если во время базирования деталь не займет горизонтального положения и не будет плотно прилегать к торцу втулки 3, то разность давлений ЛР уменьшится уменьшится также . площадь, на которую воздействует данная разность давлений, и пружина 2 разожмется, выдвинув втулку 3 до плотного соприкосновения с деталью 10. Затем втулка начнет вновь втягиваться в корпус 4 схвата с притянутой к ней деталью. Втягивание втулки будет происходить до упора базового контура детали, например, в наклонные поверхности фиксаторов, тем самым обеспечивая точное беззазорное базирование.. При необходимости переналадки схвата на другие детали, например базируквдиеся по внутренним поверхностям, стопорными винтами 8 расстопоривают ползуны 6 с фиксаторами 5, находящимися на направляющих 9. Выставляют необходимое положение ползунов с фиксаторами и стопорят их винтами 8. Таким образом, схват перенастраивается на другую деталь, и базирование осуществляется как показано на фиг. 5. Применение схвата повышает точность автоматических станков и линий, а также обеспечивает быструю переналадку и снижение трудоемкости наладочных работ за счет универсальности и позволяет применять предлагаемый схват в производстве с меняющейся номенклатурой деталей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Самоцентрирующийся патрон | 1985 |
|
SU1273216A1 |
| Устройство для контроля расположения пересекающихся осей отверстий в детали | 1987 |
|
SU1523887A2 |
| Приспособление для обработки радиальных отверстий | 1981 |
|
SU1098684A1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1984 |
|
SU1214290A1 |
| Устройство для установки детали | 1989 |
|
SU1689015A1 |
| Вакуумное захватное устройство | 1985 |
|
SU1407802A1 |
| Переналаживаемое устройство для установки детали | 1988 |
|
SU1569164A1 |
| Приспособление для протягивания шпоночных пазов | 1990 |
|
SU1818175A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
ВАКУУМНЫЙ СХВАТ,содержащий фиксаторы и корпус с полостью. связанной с источником вакуума, отличающийся .тем, что, с целью повышения точности базирования, он снабжен ползунами и подпружиненной втулкой, размещенной в полости корпуса таким образом, что ее наружный торец выступает над фиксаторами/ при эчом ползуны размещены в направляющих корпуса, а фиксаторы соединены с ползунами шарнирно и с возможностью их стопорения. tpue.i W с СХ) ю ISD
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Струйный захват | 1974 |
|
SU548409A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
