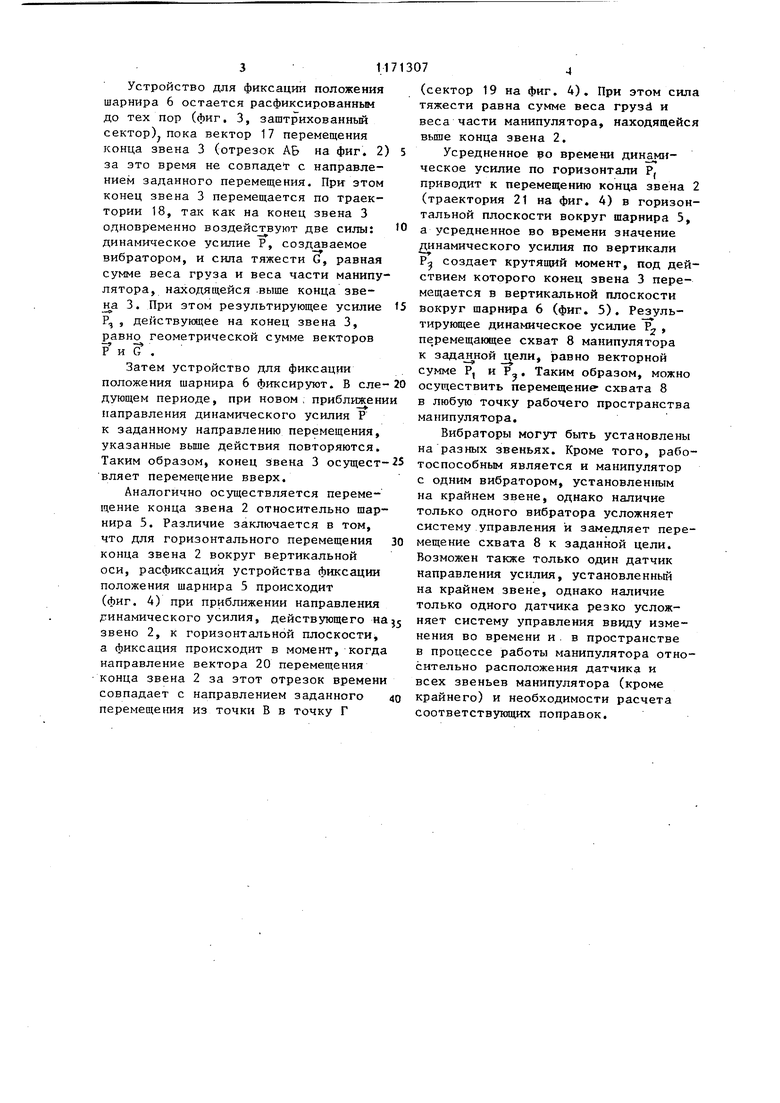
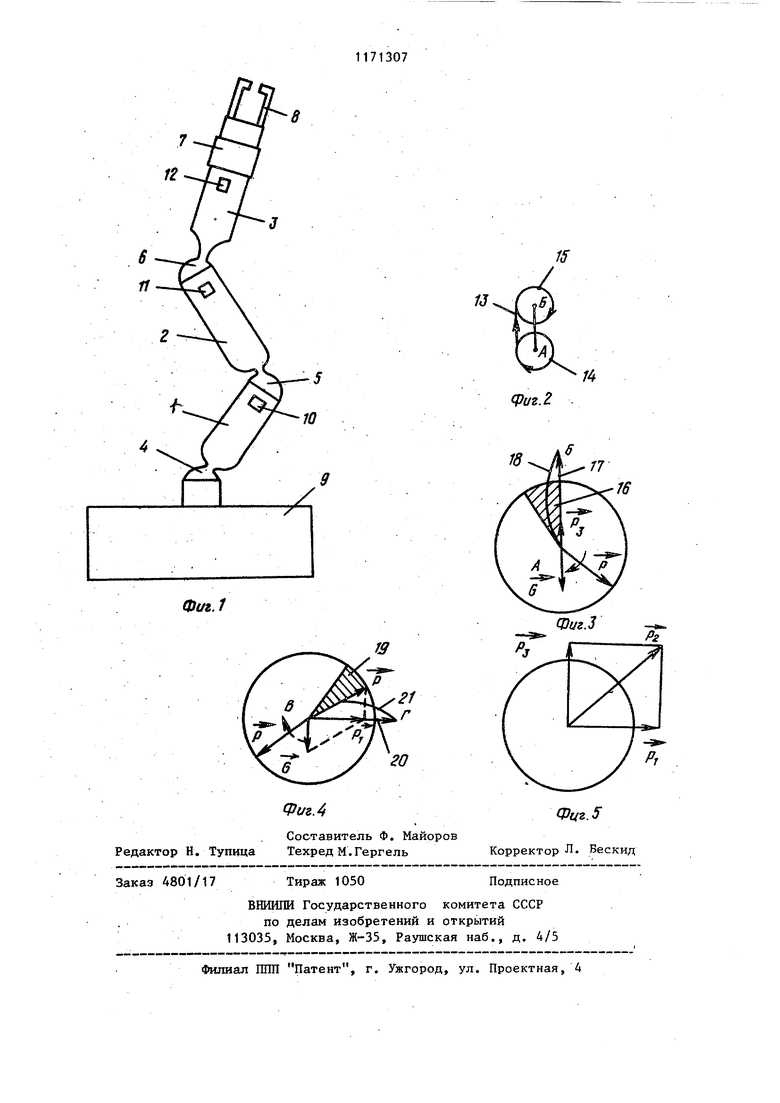
J 1 Изобретение относится к машиностроению, а именно к манипуляторам для механизации основных и вспомога- тельных операций в промьппленности« Цель изобретения - упрощение конструкции манипулятора за счет выполнения привода поворота звеньев с использованием вибраторов. На фиг. 1 изображен манипулятор с группой вибраторов, расположенных на крайнем звене; на фиг. 2 - траектории перемещения схвата; на фиг. 3 векторная диаграмма действующего динамического усилия Р, интегральног значения перемещения и фактической траектории конца звена за один цикл при вертикальном перемещении; на фиг. 4 - векторная диаграмма действу ющего динамического усилия Р при горизонтальном перемещении; на фиг.5 векторная диаграмма усредненно го во времени динамического усилия Р , вертикальной Р и -горизонтальной Р. проекций. Манипулятор содержит звенья 1-3, связанные между собой шарнирами соо ветственно 4-6, например шаровыми, снабженными устройствами для фиксации положения звеньев. Привод поворота звеньев выполнен в виде установленных ла звеньях вибраторов 7,. один из которых направлен перпен дикулярно оси звена. Вибраторы 7, установленные на одном звене, направлены перпендикулярно один другому. По крайней мере один вибратор установлен на крайнем звене, Схват установлен на крайнем звене. Звенья установлены на основании и расположены последовательно. В конструкцию привода поворота звенье входят датчики 10-12 направления усилия вибратора, выходы которых. подключены к устройству для фиксаци (не показано). Группа вибраторов 7 может состоять из двух эксцентриковы вибраторов со взаимно перпендикуляр ными осями вращения, или из трех электромагнитных вибраторов со взаимно перпендикулярными осями, или из одного эксцентрикового вибратора и одного электромагнитного вибратор причем ось вращения эксцентрикового вибратора параллельна оси, вдоль которой создаются электромагнитным вибратором усилия. При этом каждый из группы вибраторов выполнен с виб рационным усилием, превышающим мак7симальную грузоподъемность манипулятора (с учетом собственного веса звеньен, вибраторов и захвата) „ В качестве датчиков направления динамического усилия могут быть приМанипулятор работает следуюищм образом. Для перемещения схвата 8 в заданном направлении включают группу вибраторов 7, которые возбуждают вибрацию в трех взаимно перпендикулярных направлениях с амплитудным значением ускорения вибрации, превышающим ускорение свободного падения. Датчики 10-12 направления усилия вырабатывают сигналы, соответствующие мгновенному значению направления усилия в звеньях 1-3 соответственно. Эти сигналы поступают в управляющее устройство (не показано ), например электронно-вычислительную машину (ЭВМ). ЭВМ определяет по заданной программе, какие звенья и в каком направлении должны быть повернуты, чтобы схват 8 переместился в заданную точку рабочего пространства манипулятора. Например, звено 3 со схваток 8 должно переместиться относительно основания 9 вверх, а затем звено 2 должно повернуться в шарнире 5 вокруг вертикальной оси, т.е. конец звена 2 должен переместиться в горизонтальной плоскости. В момент приближения направления динамического усилия, действующего на звено 3, к вертикали срабатывает датчик 12 и ЭВМ подает сигнал на расфиксацию устройства для фиксации положения в шарнире 6. При этом звено 3 начнет двигаться с угловым ускорением, вращаясь вокруг шарнира 6, а конец звена 3 начнет двигаться вверх под действием неуравновешенного динамического усилия. Участок 13 перемещения конца звена 3 соединяет траекторию 14 перемещения конца звена 3 при зафиксированном устройстве для фиксации положения шарнира 6 в точке А и траекторию 15 перемещения звена 3 при зафиксированном устройстве для фиксации положения шарнира 6 в точке Б после окончания вертикального перемещения конца звена 3 из точки Л в точку Б рабочего пространства манипулятора. Устройство для фиксации положения шарнира 6 остается расфиксированным до тех пор (фиг. 3, заштрихованньй сектор) пока вектор 17 перемещения конца звена 3 (отрезок АБ на фиг. 2) за это время не совпадет с направлением заданного перемещения. При этом конец звена 3 перемещается по траектории 18, так как на конец звена 3 одновременно воздействуют две силы: динамическое усилие Р, создаваемое вибратором, и сила тяжести G, равная сумме веса груза и веса части манипулятора, находящейся выше конца звена 3. При этом результирующее усилие Р, , действующее на конец звена 3, равно геометрической сумме векторов и (f . Затем устройство для фиксации положения шарнира 6 фиксируют. В еледующем периоде, при новом, приближени направления динамического усилия Р к заданному направлению перемещения. указанные выше действия повторяются. Таким образом, конец звена 3 осуществляет перемеп(ение вверх. Аналогично осуществляется перемещение конца звена 2 относительно шарнира 5. Различие заключается в том. что для горизонтального перемещения конца звена 2 вокруг вертикальной оси, расфиксация устройства фиксации положения шарнира 5 происходит (фиг. 4) при приближении направления динамического усилия, действующего Ha звено 2, к горизонтальной плоскости, а фиксация происходит в момент, когда направление вектора 20 перемещения конца звена 2 за этот отрезок времени совпадает с направлением заданного перемещения из точки В в точку Г (сектор 19 на фиг. 4). При этом сила тяжести равна сумме веса грузи и веса части манипулятора, находящейся выше конца звена 2. Усредненное во времени дин ьатческое усилие по горизонтали Р, приводит к перемещению конца звена 2 (траектория 21 на фиг. 4) в горизонтальной плоскости вокруг шарнира 5, а усредненное во времени значение динамического усилия по вертикали Р создает крутящий момент, под действием которого конец звена 3 перемещается в вертикальной плоскости вокруг шарнира 6 (фиг. 5). Результирующее динамическое усилие , перемещающее охват 8 манипулятора к заданной цели, равно векторной сумме Р, и Р,, Таким образом, можно осуществить перемещение схвата 8 в любую точку рабочего пространства манипулятора. Вибраторы могут быть установлены на разных звеньях. Кроме того, работоспособным является и манипулятор с одним вибратором, установленным на крайнем звене, однако наличие только одного вибратора усложняет систему управления и замедляет перемещение схвата 8 к заданной цели. Возможен также только один датчик направления усилия, установленньй на крайнем звене, однако наличие только одного датчика резко усложняет систему управления ввиду изменения во времени и. в пространстве в процессе работы манипулятора относительно расположения датчика и всех звеньев манипулятора (кроме крайнего) и необходимости расчета соответствующих поправок.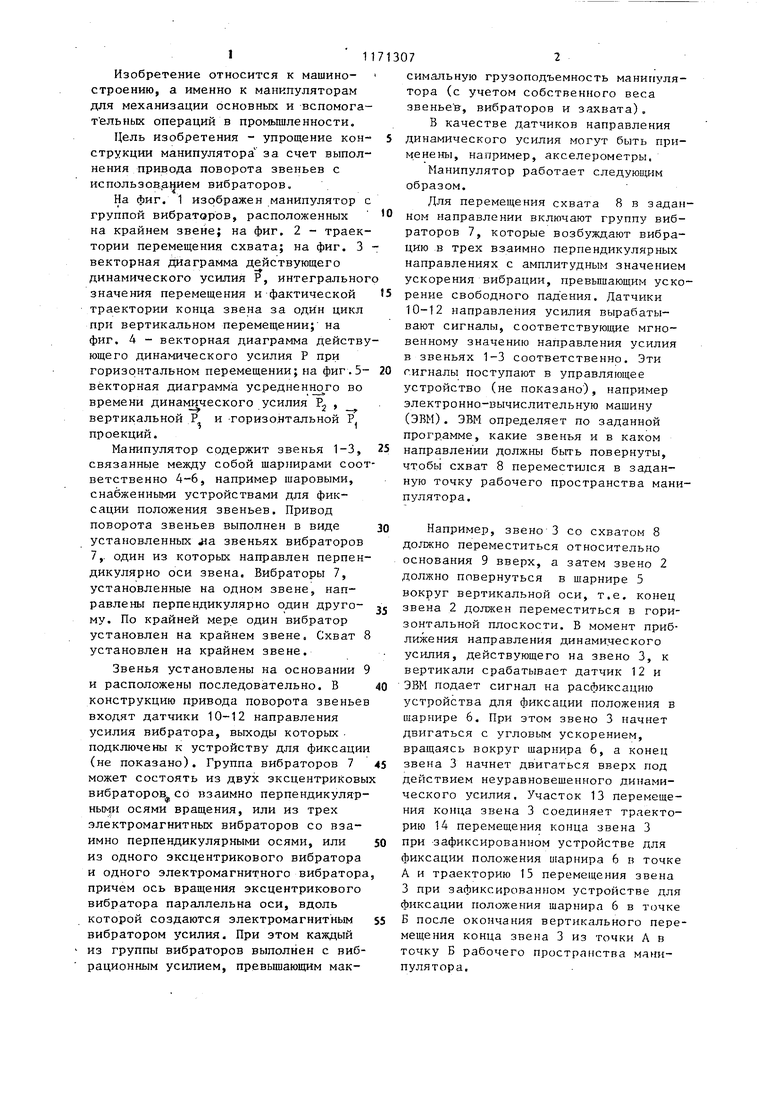
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1333570A1 |
| Манипулятор модульного типа | 1983 |
|
SU1093538A1 |
| Задающий орган манипулятора | 1986 |
|
SU1393619A1 |
| Запястье манипулятора | 1985 |
|
SU1303405A1 |
| АДАПТИВНЫЙ МОБИЛЬНЫЙ ПРОСТРАНСТВЕННЫЙ РОБОТ-МАНИПУЛЯТОР ДЛЯ ПРОТЕЗИРОВАНИЯ ВЕРХНЕЙ КОНЕЧНОСТИ ПАЦИЕНТА И СПОСОБ ОБСЛУЖИВАНИЯ ПАЦИЕНТА ПОСРЕДСТВОМ АДАПТИВНОГО МОБИЛЬНОГО ПРОСТРАНСТВЕННОГО РОБОТА-МАНИПУЛЯТОРА | 2020 |
|
RU2738859C1 |
| Сустав манипулятора | 1984 |
|
SU1192972A1 |
| Манипулятор | 1984 |
|
SU1194673A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2179920C2 |
| Способ управления манипулятором промышленного робота | 1991 |
|
SU1815209A1 |
| АДАПТИВНЫЙ МОБИЛЬНЫЙ ПРОСТРАНСТВЕННЫЙ РОБОТ-МАНИПУЛЯТОР И СПОСОБ ОРГАНИЗАЦИИ ДВИЖЕНИЙ И КОНТРОЛЯ ФИЗИКО-МЕХАНИЧЕСКИХ СВОЙСТВ И ГЕОМЕТРИЧЕСКОЙ ФОРМЫ КОНТАКТИРУЕМОЙ ПОВЕРХНОСТИ И ТРАЕКТОРИИ ПЕРЕМЕЩЕНИЯ С ЕГО ПОМОЩЬЮ | 2009 |
|
RU2424893C2 |
1. МАНИПУЛЯТОР, содержащий основание, на котором установлены последовательно расположенные шарнирно связанные между собой звенья, снабженные приводами поворота и уст.ройствами для фиксации звеньев, а также схват, закрепленный на крайнем звене, отличающийся тем. что, с целью упрощения его конструкции, привод поворота звеньев выполнен в виде установленных на звеньях по крайней мере одного вибратора, направленного перпендикулярно оси звена, и датчика направления усилия вибратора, выход которого подключен к устройству для фиксации звена. 2.Манипулятор по п. 1, -о т л ичающийся тем, что вибраторы установлены на одном звене и направлены перпендикулярно один другому. 3.Манипулятор йо п. 1, о т л ичающийся тем, что по крайней § мере один вибратор установлен на крайнем звене манипулятора. (Л с 4.Манипулятор по п, 1, о т л ичающийся тем, что датчики направления усилия вибратора установлены на каждом звене манипулятора.
| Манипулятор с цикловым управлением | 1978 |
|
SU738865A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
