Изобретение относится к прокатному производству и предназначено для использования на широкополосных станах горячей прокатки.
Цель изобретения-уменьшение износа роликов рольганга и снижение расхода электроэнергии.
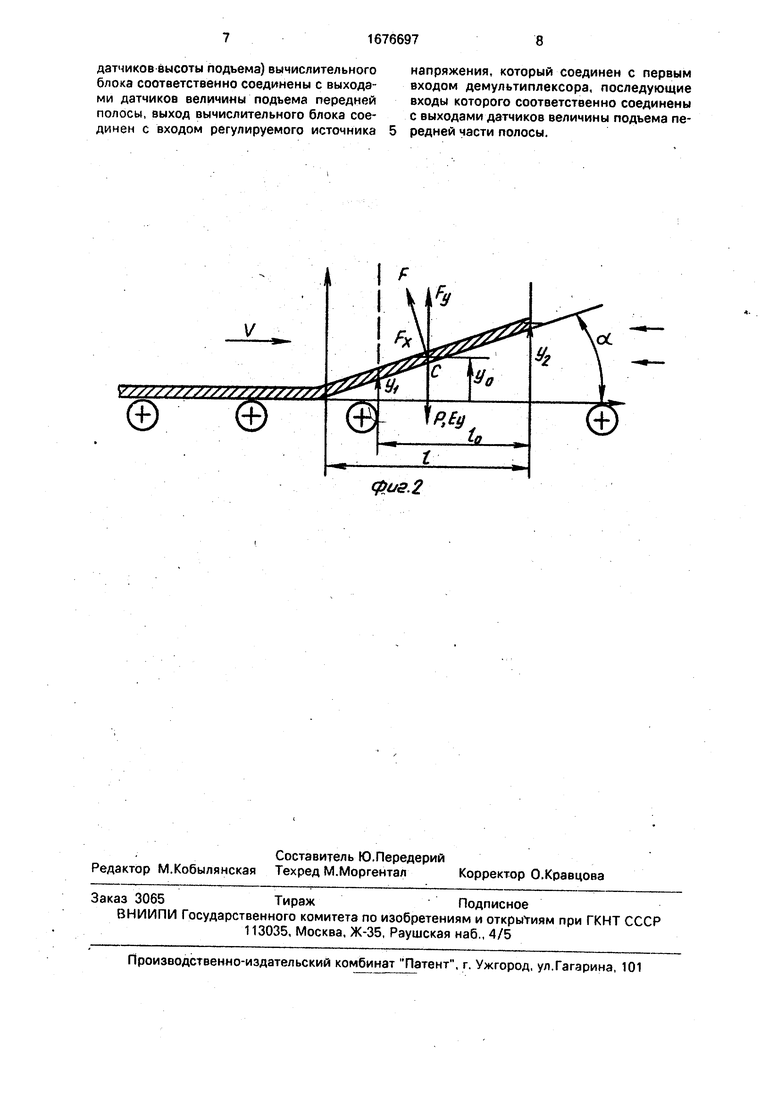
На фиг. 1 изображена блок-схема устройства для стабилизации положения переднего конца полосы; на фиг. 2 - схема, поясняющая алгоритм работы вычислительного блока,
Устройство для стабилизации положения переднего конца полосы содержит плоские электромагниты 1-4, демультип- лексор 5, регулируемый источник 6 напряжения, вычислительный блок 7, задатчики 8j10 ширины, толщины и плотности, датчики 11-18 величины подъема передней части полосы, каждая пара которых расположена на фиксированном расстоянии друг от друга. Первый, второй и третий входы вычислительного блока 7 соответственно соединены с выходами задатчиков 8-10 ширины, толщины и плотности, четвертый вход вычислительного блока 7 и последующие входы (по числу передней части датчиков подъема) соответственно соединены с выходами датчиков 11-18 величины подъема передней части полосы, выход вычислительного блока 7 соединен с входом регулируемого источника 6 напряжения, выход которого соединен с первым входом демультиплексора 5, последующие входы которого соответственно соединены с выходами датчиков величины подъема передней части полосы.
Устройство работает следующим образом.
Перед началом работы в задатчики 8-10 соответственно заносят ширину, толщину и плотность металла. Для микропроцессора (блок 7) разрабатывают комплекс программ, осуществляющий синхронизацию вычислительного процесса и событий - входов полосы в зоны действия датчиков, пуска, остановки комплекса и других вспомогательных событий. Комплекс программ может содержать следующий набор задач:
диспетчер событий - осуществляет начальный пуск, синхронизацию событий и работу функциональных задач, т. е. выполняет роль тактирующего блока;
функциональная задача опроса датчиков наличия и идентификации номера сработавшего датчика - аналог дешифратора;
функциональная задача расчета компенсирующей силы и тока питания электромагнитов.
Микропроцессор должен быть оснащен операционной системой для управления задачами.
В исходном состоянии электромагниты 1-4 обесточены. При входе полосы в зону действия датчика 11 измеряется и запоминается величина подъема, передней части полосы над уровнем рольганга.
При входе головы полосы в зону дейст- вия датчика 12 производят расчет компенсирующей силы и соответствующей уставки для регулируемого источника 6 напряжения, который вырабатывает напряжение для создания тока питания электромагнита 1 для компенсации аэродинамической подъемной силы.
Формула для расчета компенсирующей силы получена из фиг. 2. Здесь приняты следующие обозначения
Р, m - соответственно вес и масса приподнятого переднего конца полосы;
а - угол подъема переднего конца полосы относительно горизонтальной плоскости;
b, h - соответственно ширина и толщина полосы;
р - плотность металла полосы; У1 - высота подъема переднего конца полосы, фиксируемая первым датчиком па- ры;
У2 - высота подъема переднего конца полосы, фиксируемая датчиком пары;
10 - расстояние между датчиками пары; I - длина поднятой передней части по- лосы;
FX, Fy - соответственно горизонтальная и вертикальная составляющие аэродинамической силы F, действующей на полосу;
Еу - вертикальная составляющая упру- гой силы сопротивления изгибу от действия аэродинамической силы F.
Будем считать, что все силы сосредоточены в центре тяжести с поднятой части полосы (фиг. 1). Условия подъема передней части полосы
. (1)
Очевидно, что работа, совершенная силой Fy no подъему передней части полосы на высоту уо . (2)
С другой стороны работа, совершенная против силы тяжести по подъему передней части полосы
Ар Р -уь mgyo Iryogyo. (3) С точностью, достаточной для инженерных расчетов, неравенство (1) можно заменить равенством , отбросив последнее слагаемое в правой части, тогда справедливым будет равенство
,(4)
откуда получается выражение для вертикальной составляющей аэродинамической силы Fy
.(5)
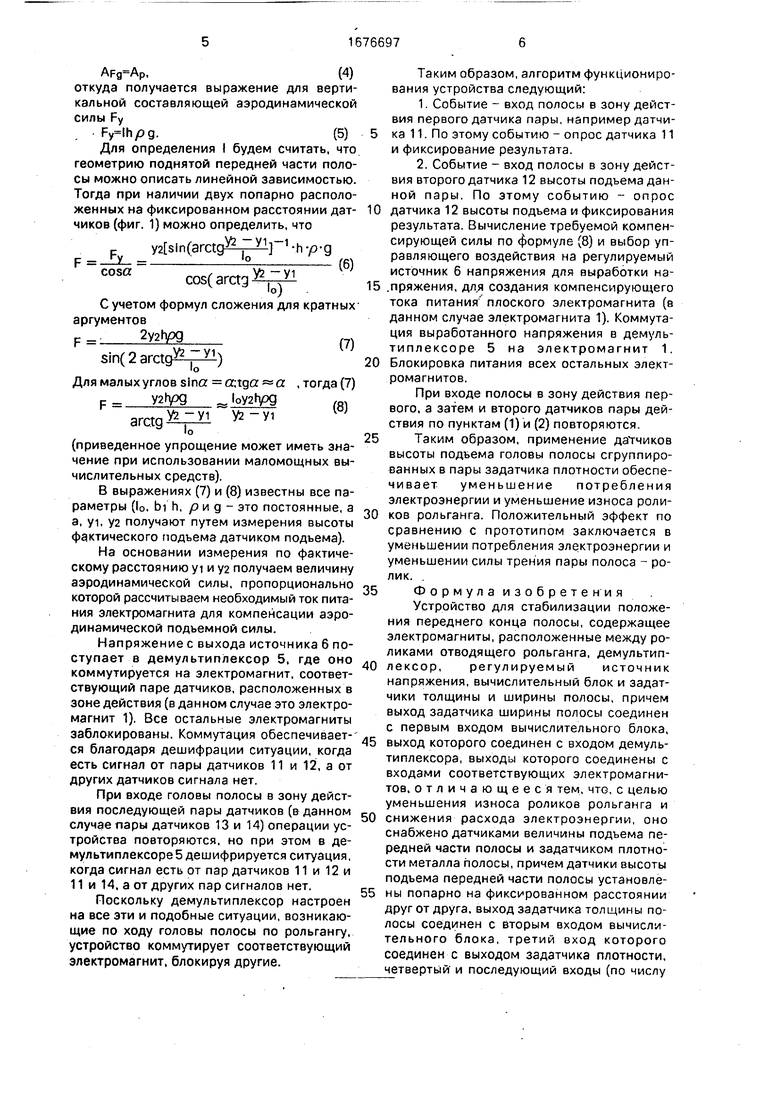
Для определения I будем считать, что геометрию поднятой передней части полосы можно описать линейной зависимостью. Тогда при наличии двух попарно расположенных на фиксированном расстоянии датчиков (фиг. 1) можно определить, что
с (arctp F
Г -hvo-g
cosa
cos( arctg
(6)
С учетом формул сложения дл аргументов
2y2hpg
Sjn(2arctgЈ- l)
о
Для малых углов sina a;tga « a р У2п/зд loyah/og
arctg &fn
о
У2 -У1
(приведенное упрощение может иметь значение при использовании маломощных вычислительных средств).
В выражениях (7) и (8) известны все параметры (lo. bi h, р и g - это постоянные, а a, yi, У2 получают путем измерения высоты фактического подъема датчиком подъема).
На основании измерения по фактическому расстоянию yi и у2 получаем величину аэродинамической силы, пропорционально которой рассчитываем необходимый ток питания электромагнита для компенсации аэродинамической подъемной силы.
Напряжение с выхода источника 6 поступает в демультиплексор 5. где оно коммутируется на электромагнит, соответствующий паре датчиков, расположенных в зоне действия (в данном случае это электромагнит 1). Все остальные электромагниты заблокированы. Коммутация обеспечивается благодаря дешифрации ситуации, когда есть сигнал от пары датчиков 11 и 12, а от других датчиков сигнала нет.
При входе головы полосы в зону действия последующей пары датчиков (в данном случае пары датчиков 13 и 14) операции устройства повторяются, но при этом в де- мультиплексоре5 дешифрируется ситуация, когда сигнал есть от пар датчиков 11 и 12 и 11 и 14, а от других пар сигналов нет.
Поскольку демультиплексор настроен на все эти и подобные ситуации, возникающие по ходу головы полосы по рольгангу, устройство коммутирует соответствующий электромагнит, блокируя другие.
Таким образом, алгоритм функционирования устройства следующий:
1 Событие - вход полосы в зону действия первого датчика пары, например датчи- ка 11. По этому событию - опрос датчика 11 и фиксирование результата.
2. Событие - вход полосы в зону действия второго датчика 12 высоты подъема данной пары. По этому событию - опрос
0 датчика 12 высоты подъема и фиксирования результата. Вычисление требуемой компенсирующей силы по формуле (8) и выбор управляющего воздействия на регулируемый источник 6 напряжения для выработки на5 .пряжения, для создания компенсирующего тока питания плоского электромагнита (в данном случае электромагнита 1). Коммутация выработанного напряжения в демуль- типлексоре 5 на электромагнит 1.
0 Блокировка питания всех остальных электромагнитов.
При входе полосы в зону действия первого, а затем и второго датчиков пары действия по пунктам (1) и (2) повторяются.
5 Таким образом, применение датчиков высоты подъема головы полосы сгруппированных в пары задатчика плотности обеспечивает уменьшение потребления электроэнергии и уменьшение износа роли0 ков рольганга. Положительный эффект по сравнению с прототипом заключается в уменьшении потребления электроэнергии и уменьшении силы трения пары полоса - ролик.
5 Формула изобретения
Устройство для стабилизации положения переднего конца полосы, содержащее электромагниты, расположенные между роликами отводящего рольганга, демультип0 лексор, регулируемый источник напряжения, вычислительный блок и задат- чики толщины и ширины полосы, причем выход задатчика ширины полосы соединен с первым входом вычислительного блока,
5 выход которого соединен с входом демуль- типлексора, выходы которого соединены с входами соответствующих электромагнитов, отличающееся тем, что, с целью уменьшения износа роликов рольганга и
0 снижения расхода электроэнергии, оно снабжено датчиками величины подъема передней части полосы и задатчиком плотности металла полосы, причем датчики высоты подъема передней части полосы установле5 ны попарно на фиксированном расстоянии друг от друга, выход задатчика толщины полосы соединен с вторым входом вычислительного блока, третий вход которого соединен с выходом задатчика плотности, четвертый и последующий входы (по числу
датчиков высоты подъема) вычислительного блока соответственно соединены с выходами датчиков величины подъема передней полосы, выход вычислительного блока соенапряжения, который соединен с первым входом демультиплексора, последующие входы которого соответственно соединены с выходами датчиков величины подъема пе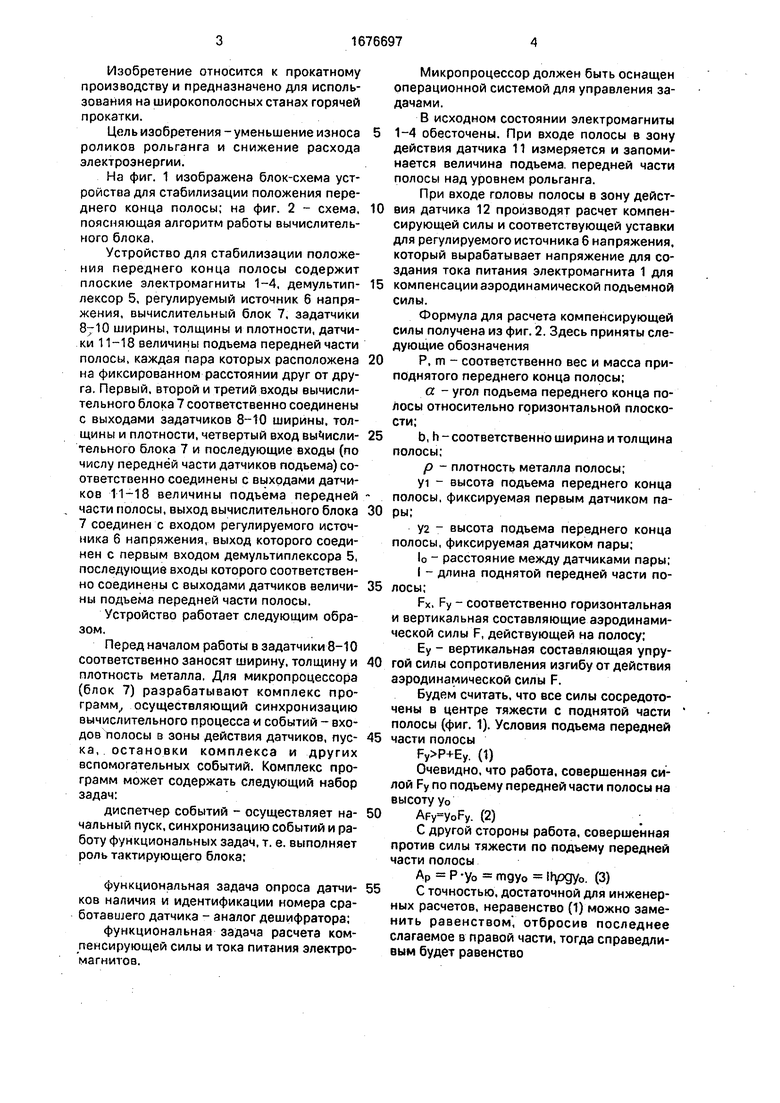
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации положения передних концов полос при прокатке | 1987 |
|
SU1477492A1 |
| Устройство для стабилизации положения передних концов полос при прокатке | 1980 |
|
SU944695A1 |
| Система управления рабочим процессом асфальтоукладчика | 1989 |
|
SU1694766A1 |
| Устройство для регулирования температуры полосы на выходном рольганге непрерывного стана горячей прокатки | 1977 |
|
SU753512A1 |
| Устройство для регулирования толщины полосы на входе непрерывного прокатного стана | 1979 |
|
SU900903A1 |
| Способ прокатки и транспортировки тонких полос по отводящему рольгангу широкополосного стана | 2020 |
|
RU2743386C1 |
| Адаптивный регулятор размеров проката на сортовом стане | 1980 |
|
SU959861A1 |
| Устройство для регулирования температуры полосы на выходном рольганге непрерывного стана горячей прокатки | 1978 |
|
SU759165A1 |
| Устройство управления положением модели в аэродинамической трубе | 1988 |
|
SU1649344A1 |
| ИМИТАТОР ВИДИМОСТИ В СЛОЖНЫХ МЕТЕОРОЛОГИЧЕСКИХ УСЛОВИЯХ | 1991 |
|
RU2056646C1 |
Изобретение относится к прокатному производству и предназначено для использования на широкополосных станах горячей прокатки. Цель изобретения - уменьшение износа роликов рольганга и снижение расхода электроэнергии. Поставленная цель достигается тем, что в устройстве для стабилизации положения переднего конца полосы, содержащем электромагниты 1-4, расположенные между роликами отводящего рольганга, де- мультиплексор 5, регулируемый источник 6 напряжения, вычислительный блок 7 и за- датчики 9 и 8 толщины и ширины полосы, причем выход задатчика 8 ширины полосы соединен с первым выходом вычислительного блока 7, выход которого соединен с входом регулируемого источника б напряжения, выход которого соединен с входом демультиплексора 5, выходы которого соединены с входами соответствующих электромагнитов 1-4, датчики 11-18 прдьема головы полосы, задатчик 10 плотности металла полосы, причем датчики 11-18 высоты подъема установлены попарно так, что в парах датчики расположены на фиксированном расстоянии друг от друга, выход задатчика 9 толщины соединен с вторым входом вычислительного блока 7, третий вход которого соединен с выходом задатчика 10 плотности, четвертый и последующий входы (по числу датчиков высоты подъема) вычислительного блока 7 соответственно соединены с выходами датчиков 11-18 высоты подъема, выход вычислительного блока 7 соединен с входом регулируемого источника 6 напряжения, вход которого соединен с первым входом коммутатора, последующие входы которого соответственно соединены с выходами датчиков 11-18 подъема полосы. 2 ил. Ј О VI о о о VI w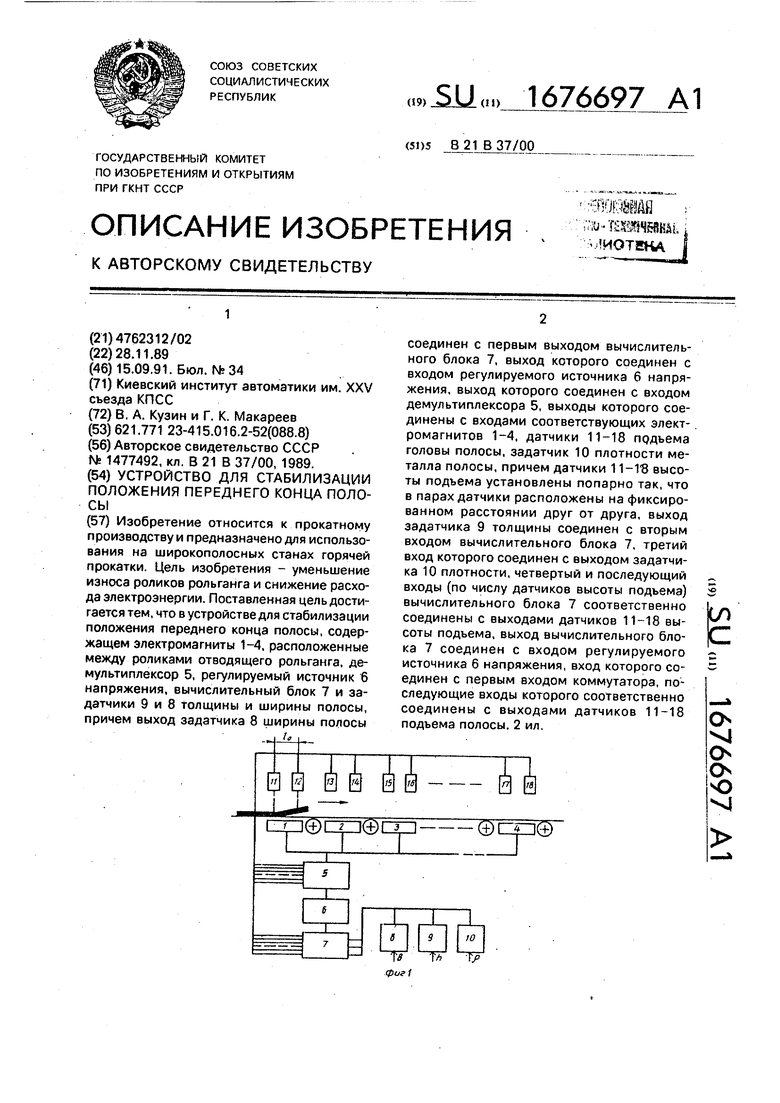
динен с входом регулируемого источника 5 редней части полосы.
фиг. 2
| Устройство для стабилизации положения передних концов полос при прокатке | 1987 |
|
SU1477492A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
