(5) УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ ПОЛОЖЕНИЯ ПЕРЕДНИХ КОНЦОВ ПОЛОС ПРИ ПРОКАТКЕ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации положения передних концов полос при прокатке | 1987 |
|
SU1477492A1 |
| Способ управления ускоренным охлаждением проката и устройство для его осуществления | 1988 |
|
SU1547901A1 |
| Устройство для автоматического регулирования толщины полосы | 1981 |
|
SU1011291A1 |
| Устройство для автоматического регулирования толщины полосы заданного профиля | 1982 |
|
SU1033248A1 |
| Устройство для автоматического управления ускоренным охлаждением проката | 1983 |
|
SU1161205A1 |
| Устройство для стабилизации положения переднего конца полосы | 1989 |
|
SU1676697A1 |
| Устройство для регулирования температуры полосы в процессе прокатки | 1981 |
|
SU986531A1 |
| Система управления машиной литья под давлением | 1989 |
|
SU1650340A1 |
| Система автоматического регулирования толщины покрытия жести | 1985 |
|
SU1341618A1 |
| Устройство для настройки скоростей валков непрерывного стана горячей прокатки | 1981 |
|
SU995940A1 |

1
Изобретение относится к технологии прокатного производства и предназначено для использования на полосовых станах горячей прокатки.
Известно устройство для стабилизации положения передних концов полос при прокатке, содержащее два ряда форсунок со струями смеси воды и сжатого воздуха, расположенных по бокам отводящего рольганга над гори- д зонтальной плоскостью полосы и наклоненных к этой плоскости и направлению движения полосы под углом 5 Во. Под давлением струй передний конец полосы прижимается к роликам (5 рольганга 1.
Недостатком устройства является повышенное охлаждение передних концов тонких полос струями смеси воды и сжатого воздуха, что ухудшает мик- 20 роструктуру металла и формирование рулонов при смотке.
Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство, содержащее плоские электромагниты с принудительным охлаждением, расположенные между роликами отводящего рольганга. Устройство работает на принципе взаимодействия индуцированных токов в полосе и роликах при прокатке. В результате этого взаимодействия электромагнитная сила притягивает полосу к роликам С21. ,,,
Недостатком устройства является ограниченный сортамент и диапазон скоростей стабилизируемых полос вследствие отсутствия в нем средств для перестройки режима стабилизации.
Целью изобретения является расширение сортамента и диапазона -скоростей стабилизируемых полос.
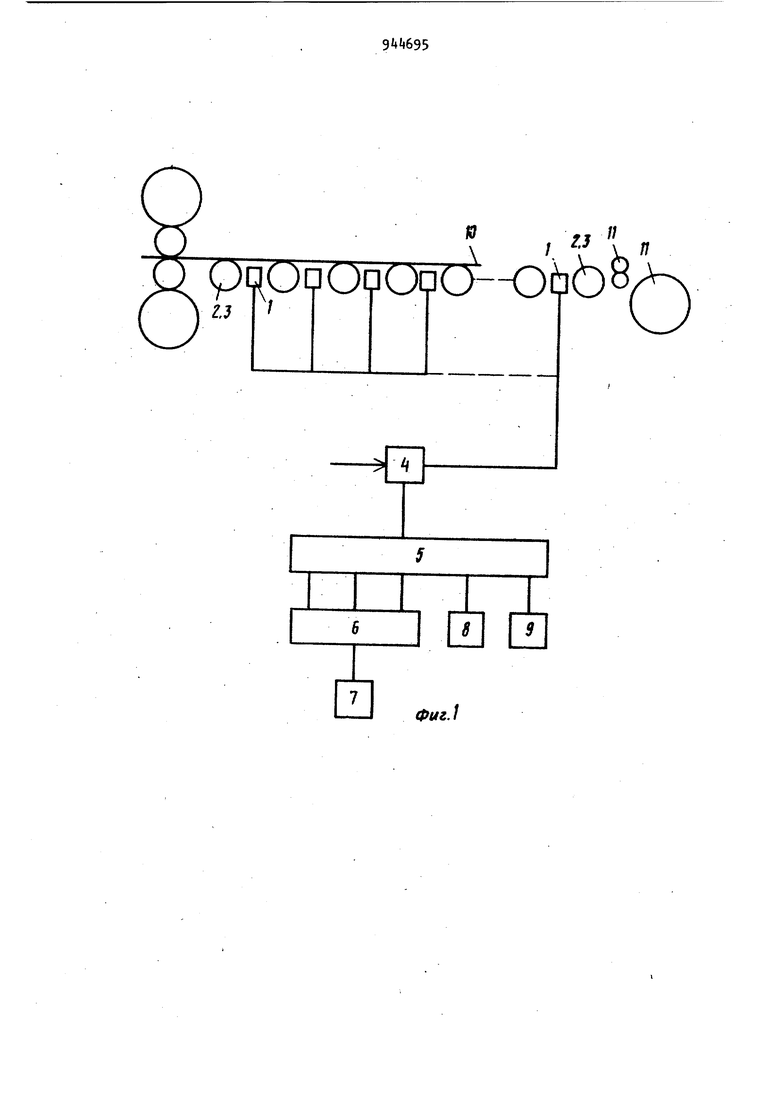
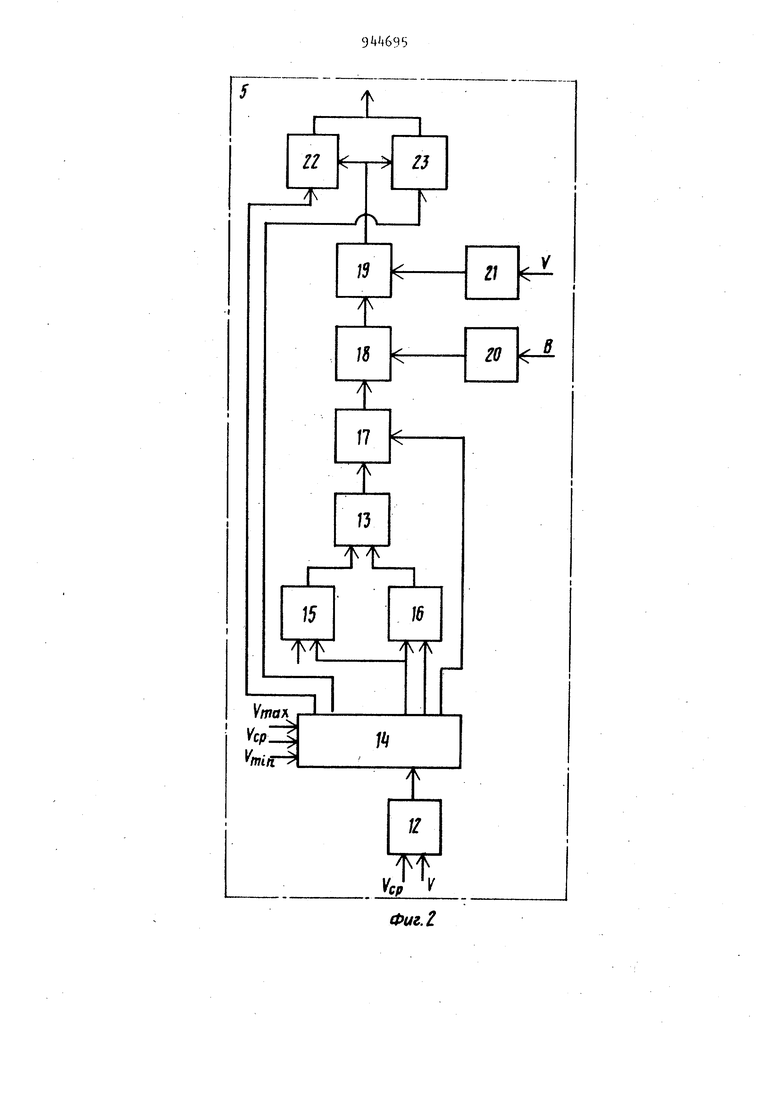
Поставленная цель достигается тем, что в устройство, содержащее плоские электромагниты с принудительным охлаждением, расположенные между роликами отводящего рольганга, дополнительно введены регулятор напряже3 9 ния, соединенный выходом с ппоскими электромагнитами, вычислительный блок, соединенный выходом с задающим входом регулятора, запоминающий блок, соединенный выходами соответственно с первым, вторым и третьим входами вычислительного блока, задатчики толщины, ширины и скорости полосы, соединенные первый с входом запоминающего блока, а второй и третий - с четвертым и пятым входами вычислительного блока. Такая конструкция устройства позволяет вычислить величину аэродинамической подъемной силы в зависимоети от толщины, ширины и скорости полосы и приложить к переднему концу полосы равную по величине и противоположно направленную электромагнитную силу. Вычисление производят по следующим формулам ( V-V. „1 Выражения (1) и (2 )используют в слу чае, когда тг- 1, а выражение (3) и () в случае, когда - 1, где j аэродинамическая подъемная сила, действующая на передний конец полосы; -площадь переднего конц полосы, приподнятого аэродинамической силой -скорость полосы -ширина ПОЛОСЫ) -. плотность окружающего воздуха , - аэродинамический коэффициент для плоской по - граничная скорость пол сы заданной толщины, при которой плои(адь пе реднего конца полосы, приподнятого аэродинамической силой, практи чески равна нулю-. граничная скорость полосы заданной толщины, при которой площадь переднего конца полосы, пр1-поднятого аэродинамической силой, равна R величине граничная скорость полосы заданной толщины, при которой площадь переднего конца полосы, приподнятого аэродинамической силой, равна величине В . На фиг. 1 изображена схема предлагаемого устройства; на фиг. 2 структурная схема его вычислительного блока; на фиг. 3 - структурная схема узла управления вычислительного блока. Устрбйство содержит плоские электромагниты 1 с принудительным охлаждением, расположенные между роликами 2 отводящего рольганга 3, регулятор Ц напряжения с отрицательной обратной связью, вычислительный блок 5, запоминающий блок 6 с ячейками памяти без разрушения информации, задатчики соответственно толщины, ширины и скорости полосы 10, моталку 11. Вычислительный блок 5 содержит компаратор 12, узел 13 деления, узел Ц управления, узлы 15 и 16 вычитания, узел 17 сложения, состоящий из сумматора и электронного ключа на втором входе, узлы 18 и 19 умножения, узлы 20 и 21 возведения в степень, узлы 22 и 2.3 умножения на постоянный коэффициент, состоящий из множителей и электронных ключей на входе. Узел Ц управления содержит инвертор 2k, электронные ключи 2528. При этом выход задатчика 7 соединен с адресным входом блока 6, выход задатчика 8 соединен с входом узла 20, выход задатчика 9 соединен с первым входом узла 15, с вторым входом компаратора 12 и входом узла 21, первый выход блока 6 соединен с входом ключа 28,второй выход блока 6 соединен с входами ключей 26 и 27 и с первым входом компаратора 12 третий выход блока 6 соединен с входом ключа 25I выход компаратора 12 соединен с ключом второго входа узла 17, с ключом входа узла 22,с управляющими входами ключей 2б и 28 и с входом инв ертора 2, выход инвертора 2k. соединен с ключом узла 23 и с управляю цими входами ключей 25 и 27, выходы ключей 25 и 26 соединены между собой, а также с вторым входом узла 15 и с первым входом узла 16, выходы ключей 27 и 28 соединены между собой, а также с вторым входом узла 16, выход узла 15 соединен с первым входом узла 13, а выход узла 16 соединен с вторым входом узла 13, выход узла 13 соединен с первым входом узла 17, выход узла 17 соединен с первым входом узла 18, выход узла 20 соединен с вторым входом узла 18, выход узла 18 соединен с первым входом узла 19, выход узла 21 соединен с вторым входом узла 19, выход узла 19 соединен с входами узлов 22 и 23, выходы узлов 22 и 23 соединены между собой, а также с задающим входом регулятора Ц, выход регулятора k соединен с плоскими электромагнитами 1 Устройство работает следующим образом. При наладке блока 6 в ячейки памя ти заносят аналоговые сигналы, пропорциональные граничным скоростям VCP и V,|,c для всего сортамен та толщин стабилизируемых полос 10. Перед прокаткой полосы 10 к регулятору Ц подводят питающее напряжени электромагнитов 1 (на фиг.1 показано стрелкой) и задатчиками 7-9 У танавливают аналогичные сигналы, пропорциональные толщине h, ширине В и скорости V стабилизируемой полосы 10. В результате этого узел 20 вычисляет величину В , узел 21 вычисляет величину V% в компаратор 12 и в узел 15 поступает сигнал, пропор циональный величине V, блок 6 выдает сигналы, пропорциональные величинам Хплп и заданной толщины h полосы 10, из которых сигнал VniiTi поступает на ключ 25, сигнал Vcp на ключи 26 и 27 и компаратор 12, сигнал Xnjj,t поступает на ключ 28. Компаратор 12 сравнивает сигналы V и VCP и выдает в узел 1 сигнал логического О при 1 или сигнал VOP логической 1 7 1. в зависи мости от логического сигнала компара тора 12 включение соответствующих узлов для вычисления аэродинамическо силы по формулам (1) и (2) или по (3) и () выполняет узел It управления. V Тёк в случае, когда гг- }, си|- Ч;р нал логического О с компаратора 12 поступает на- ключи узлов 17 и 22, в инвертор 2 и на ключи 2б и 28. В результате закрываются ключи 2б и 28 и ключи узлов 17 и 22, а инвертор 24 выдает сигнал логической , который поступает на ключ узла 23 и на ключи 25 и 27. В результате открываются ключи 25 и 27 и ключ узла 23. Через открытые ключи 25 и 27 сигналы Чт11п ср поступают в узлы 15 и 16, которые выполняют соответствуюи ие операции вычитания Vcp-VminВыходные сигналы узлов 15 и 16 поступают в узел 13, который выполняет oneV - Vmin Выходной рацию деления VCP - 4nin сигнал узла 13 поступает в узел 17, который повторяет этот сигнал, поскольку на второй входе узла закрыт его ключ. Выходные сигналы узлов 17 и 20 поступают в узел 18, который выполняет операцию умножения в . Выходные сигналы узVOP Vmin ЛОВ 18 и 21 поступают в узел 19, который выполняет операцию умножения V - Vmin . . Выходной сигнал t Чплп узла 19 поступает в узел 23, который выполняет операцию умножения на посV - Vmin . BV, тоянный коэффициент Tji 1.Г D V f xp Viin в другом случае, когда с компаратора 12 сигнал логической 1 поступает в узлы 17 и 22, в инвертор 2k и на ключи 2б и 28. В результате открываются ключи 26 и 28 и ключи узлов 17 и 22, инвертор 2 выдает сигнал логического О, который поступает в узел 23 и на ключи 25 и 27. В результате закрываются ключи 25 t 27 ключ узла 23. Через открытые ключи 2б и 28 сигналы р и , поступают к узлам 15 и 16, которые выполняют соответствующие операции вычитания V - У.р и -Vcp. Выходные сигналы узлов 15 и 16 поступают в узел 13, который вы полняет операцию деления V - VCP Выходной сигнал узла 7 13 поступает в узел 17,который выпопняет операцию сложения 1 f + ) --. Выходные сигналы уз лов 17 и 20 поступают в узел 18, ко торый выполняет операцию умножения -В . Выходные сигн VrndX Ч:.Р лы узлов 18 и 21 поступают в узел 1 который выполняет операцию умножени V - VCP I В -V ,1. Выходной max ср1 сигнал узла 19 поступает в узел 23, который выполняет операцию умно.чени на постоянный коэффициент Я.,Д V - Уср СР Выходной сигнал узла 22 или 23, соответствующий или , поступае на задающий вход регулятора k. В ре зультате регулятор Ц устанавливает на выходе напряжение питания электромагнитов 1, пропорциональное расчетной величине аэродинамической подъемной силы. При движении полосы 10 по рольгангу 3 в ней и роликах 2 индуцируются токи. В результате взаимодейст вия этих токов электромагнитная сил равная по величине и направленная противоположно аэродинамической подъемной силе, притягивает передни конец полосы 10 к роликам 2, oi6ecne чивая тем самым захват его моталкой 11 для смотки в рулон. Таким путем настраивается режим стабилизации ус ройства в зависимости от толщины, ширины и скорости полосы. Отклонение питающего напряжения электромагнитов от заданного значеиия вследствие уменьшения токов намагничивания при движении полосы по рольгангу устраняет регулятор напря жения по цепи обратной связи. Граничные скорости V, min -сР 4nas определяются экспериментально или расчетным способом. Аэродинамические коэффициенты С и определяются расчетным способом. Разные значения этих коэффицие тов в выражениях (1.) и (3) вызваны влиянием на угол атаки переднего 5 конца полосы жесткости этого конца, которая в свою очередь зависит от его длины. Устройство одновременно может быть использовано для уменьшения амплитуды колеба.ния полосы при движении по рольгангу с цель,ю повышения точности при контроле ее:неплоскостности. Устройство выгодно отличается от известных поскольку расширяет сортимент и диапазон скоростей стабилизируемых полос, что повышает производительность стана по тонкому прокату в среднем на 5%. Ожидаемый экономический эффект от внедрения изобретения за счет сокращения постоянных расходов составляет в среднем 150 тыс.руб. в год на одном прокатном стане. Формула изобретения Устройство для стабилизации положения передних концов полос при прокатке, содержащее плоские электромагнитные с принудительным охлаждением, расположенные между роликами отводящего рольганга, отличающеес я тем, что, с целью расширения сортамента и диапазона скоростей стабилизируемых полос, в него дополнительно введены регулятор напряжения, соединенный выходом с плоскими электромагнитами, вычислительный блок, соединенный выходом с задающим входом .регулятора, запоминающий блок, соединенный выходами соответственно с первым, вторым и третьим входами вычислительного блока, задатчики толщины, ширины и скорости полосы, первый из которых соединен с входом запоминающего блока, а второй и третий - с четвертым и пятым входами вычислительного блока. Источники информации, принятые во внимание при экспертизе 1.Патент Японии № 52-30137, кл. 12 С 211.it, 1977. 2.Патент Японии № , кл. 12 С 211.4, 1977. раорОдОРО-О /J Я Ьб /Ц
Фиг.1
Фиг. 2
