Изобретение относится к конвейерост- роению и может быть использовано при транспортировании сыпучих грузов и разветвленной сети совместно работающих конвейеров и колебаниях грузопотоков.
Цель изобретения - повышение надежности в работе путем более стабильного деления потока сыпучего груза и повышение долговечности, а также снижение инерционности процесса деления, грузопотока, по- вышение ремонтопригодности и эффективности процесса стабилизации грузопотока с учетом регулирующего действия барабана и накопителя.
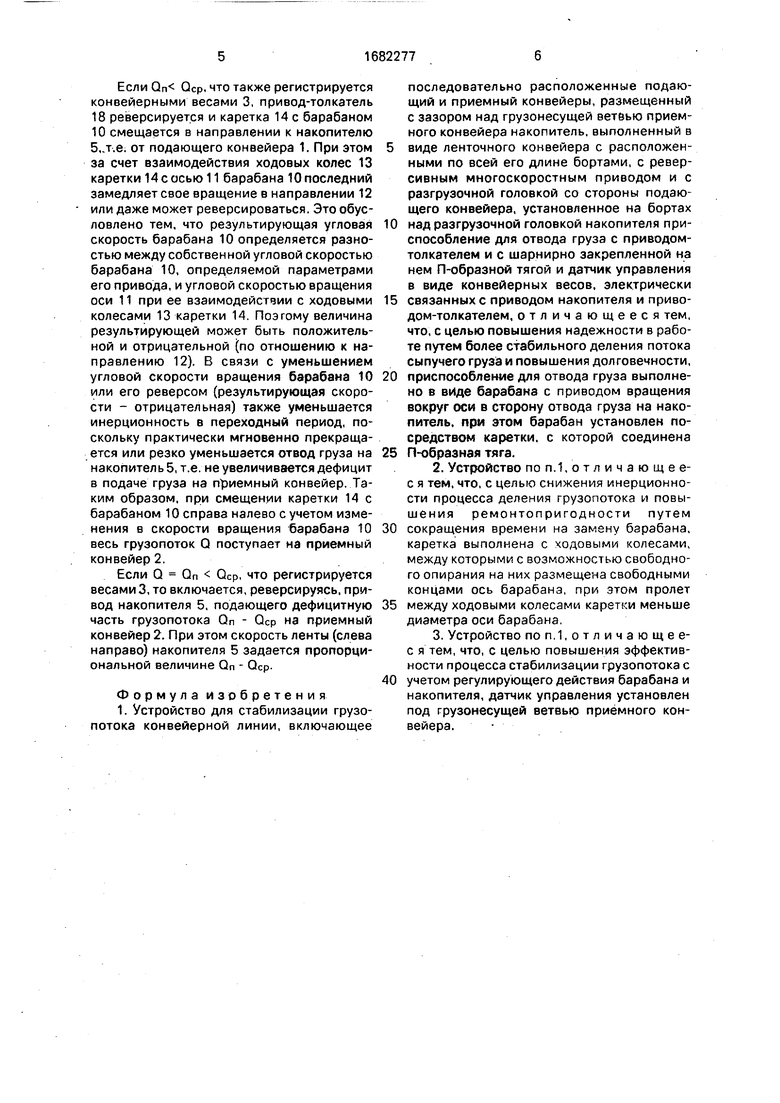
На фиг,1 показано устройство, вид сбо- ку; на фиг.2 - вид А на фиг.1; на фиг.З - разрез Б-Б на фиг.1; на фиг.4 - вид В на фиг.2; на фиг.5 - разрез Г-Г на фиг.2; на фиг.6 - схема грузопотоков в режиме отвода избыточного груза на накопитель; на фиг.7 - го же, в режиме компенсации.
Устройство состоит из подающего конвейера 1 и приемного конвейера 2, последовательно установленного с конвейером 1 и снабженного датчиком наличия груза в виде конвейерных весов 3, установленных под грузонесущей ветвью конвейера 2.
Над грузонесущей ветвью конвейера 2 с зазором А размещен накопитель 5 в виде конвейера с бесконечно замкнутым тяговым органом и разгрузочной головкой б, которая может быть одновременно приводной. Накопитель 5 может быть выполнен в виде ленточного конвейера или скребкового конвейера. Накопитель 5 оборудован на всю длину сплошными бортами 7, высота h которых принята больше максимально возможной высоты слоя hr. груза на накопителе 5. Накопитель 5 размещен над приемным конвейером 2 соосно, а его длина выбрана из условия аккумулирования на нем количества груза, соответствующего разности максимальной и средней производительности подающего конвейера 1. Накопитель 5 оборудован реверсивным многоскоростным приводом 8, соединенным электрической связью 9 с конвейерными весами 3.
Над разгрузочной головкой 6 накопителя 5 установлено приспособление для отвода груза в виде приводного мотора-барабана 10 с возможностью его вращения вокруг оси 11 в направлении 12 отвода груза на накопитель 5. При этом ось 11 барабана 10 своими свободными концами размещена между двумя ходовыми коле- сами 13 каретки 14 барабана 10 с возможностью свободного опирания на колеса 13. Каретка 14 установлена на направляющих 15 с возможностью взаимодействия с ними. Направляющие 15
закреплены на бортах 7 накопителя 5. Каретка 14 связана через шарнир 16 со штоком17электровинтово гопривода-толкателя 18 П-образной тягой 19. Просвет 20 между ходовыми колесами 13 каретки 14 принят меньше диаметра оси 11 барабана 10. Привод-толкатель 18 установлен через шарнир 21 на бортах 7.
Питание мотора-барабана 10 осуществлено с помощью электрического кабеля 22 и муфты 23 ввода. При этом кабель 22 в пролете между муфтой 23 и источником питания (не показан) выполнен в виде спирали (не показана) с возможностью ее закручивания и раскручивания при повороте оси 11 на несколько оборотов.
Устройство работает следующим образом.
Включается мотор-барабан 10 подачей напряжения по кабелю 22. При этом барабан 10 начинает вращаться вокруг оси 11 в направлении 12 (против часовой стрелки). Далее включается подающий 1 и приемный 2 конвейеры. При работающих конвейерах 1 и 2 поступающий с подающего конвейер. 1 грузопоток Q, взаимодействуя с барабаном 10, распределяется на два потока. Первый поток Qn поступает на приемный конвейер 2, а второй Q-Qn, отсекаемый барабаном 10, направляется на накопитель 5. При этом вращение барабана 10 способствует отводу второго потока Q-Qn на накопитель 5.
Если Qn Qcp, что регистрируется конвейерными весами 3, где QCp - средний грузопоток, то включается привод толкателя, который своим штоком 17 и П-образной тягой 19 смещает каретку 14 слева направо, т.е. в сторону подающего конвейера 1. Благодаря этому величина потока Qn снижается до QCp. В этот момент по сигналу весов 3 привод-толкатель 18 выключается и каретка 14 с барабаном 10 останавливается. При этом в процессе движения каретки 14 слева направо ее ходовые колеса 13, взаимодействуя с осью 11 барабана 10, заставляют последний увеличить угловую скорость своего вращения. Поэтому снижается инерционность процесса регулирования величины грузопотока в период переходного режима. Увеличение угловой скорости вращения барабана 10 происходит за счет сложения собственной скорости вращения барабана 10, заданной приводом, и угловой скорости вращения оси 11 при ее взаимодействии с вращающимися ходовыми колесами 13.
Что касается скорости движения ленты накопителя 5, то она задается пропорциональной величине Qn - Qcp.
Если Qn Qcp, что также регистрируется конвейерными весами 3, привод-толкатель 18 реверсируется и каретка 14 с барабаном 10 смещается в направлении к накопителю 5,.т.е. от подающего конвейера 1. При этом за счет взаимодействия ходовых колес 13 каретки 14 с осью 11 барабана 10 последний замедляет свое вращение в направлении 12 или даже может реверсироваться. Это обусловлено тем, что результирующая угловая скорость барабана 10 определяется разностью между собствен ной угловой скоростью барабана 10, определяемой параметрами его привода, и угловой скоростью вращения оси 11 при ее взаимодействии с ходовыми колесами 13 каретки 14. Поэтому величина результирующей может быть положительной и отрицательной (по отношению к направлению 12). В связи с уменьшением угловой скорости вращения барабана 10 или его реверсом (результирующая скорости - отрицательная) также уменьшается инерционность в переходный период, поскольку практически мгновенно прекращается или резко уменьшается отвод груза на накопитель 5, т.е. не увеличивается дефицит в подаче груза на приемный конвейер. Таким образом, при смещении каретки 14 с барабаном 10 справа налево с учетом изменения в скорости вращения барабана 10 весь грузопоток Q поступает на приемный конвейер 2.
Если Q Qn Qcp, что регистрируется весами3, то включается, реверсируясь. привод накопителя 5, подающего дефицитную часть грузопотока Qn - Qcp на приемный конвейер 2. При этом скорость ленты (слева направо) накопителя 5 задается пропорциональной величине Qn - Qcp.
Формула изобретения
1. Устройство для стабилизации грузопотока конвейерной линии, включающее
последовательно расположенные подающий и приемный конвейеры, размещенный с зазором над грузонесущей ветвью приемного конвейера накопитель, выполненный в виде ленточного конвейера с расположенными по всей его длине бортами, с реверсивным многоскоростным приводом и с разгрузочной головкой со стороны подающего конвейера, установленное на бортах над разгрузочной головкой накопителя приспособление для отвода груза с приводом- толкателем и с шарнирно закрепленной на нем П-образной тягой и датчик управления в виде конвейерных весов, электрически связанных с приводом накопителя и приводом-толкателем, отличающееся тем, что, с целью повышения надежности в работе путем более стабильного деления потока сыпучего груза и повышения долговечности, приспособление для отвода груза выполнено в виде барабана с приводом вращения вокруг оси в сторону отвода груза на накопитель, при этом барабан установлен посредством каретки, с которой соединена П-образная тяга.
2.Устройство по п.1. о т л и ч а ю щ е е- с я тем, что, с целью снижения инерционности процесса деления грузопотока и повышения ремонтопригодности путем сокращения времени на замену барабана, каретка выполнена с ходовыми колесами, между которыми с возможностью свободного опирания на них размещена свободными концами ось барабана, при этом пролет между ходовыми колесами каретки меньше диаметра оси барабана.
3.Устройство поп.1,отличающее- с я тем, что, с целью повышения эффективности процесса стабилизации грузопотока с учетом регулирующего действия барабана и накопителя, датчик управления установлен под грузонесущей ветвью приемного конвейера.
iZ/
-вц
И
11 В
.ъ 21 18 17
Фиъ.2
5-6
V
11 В
Фиг.З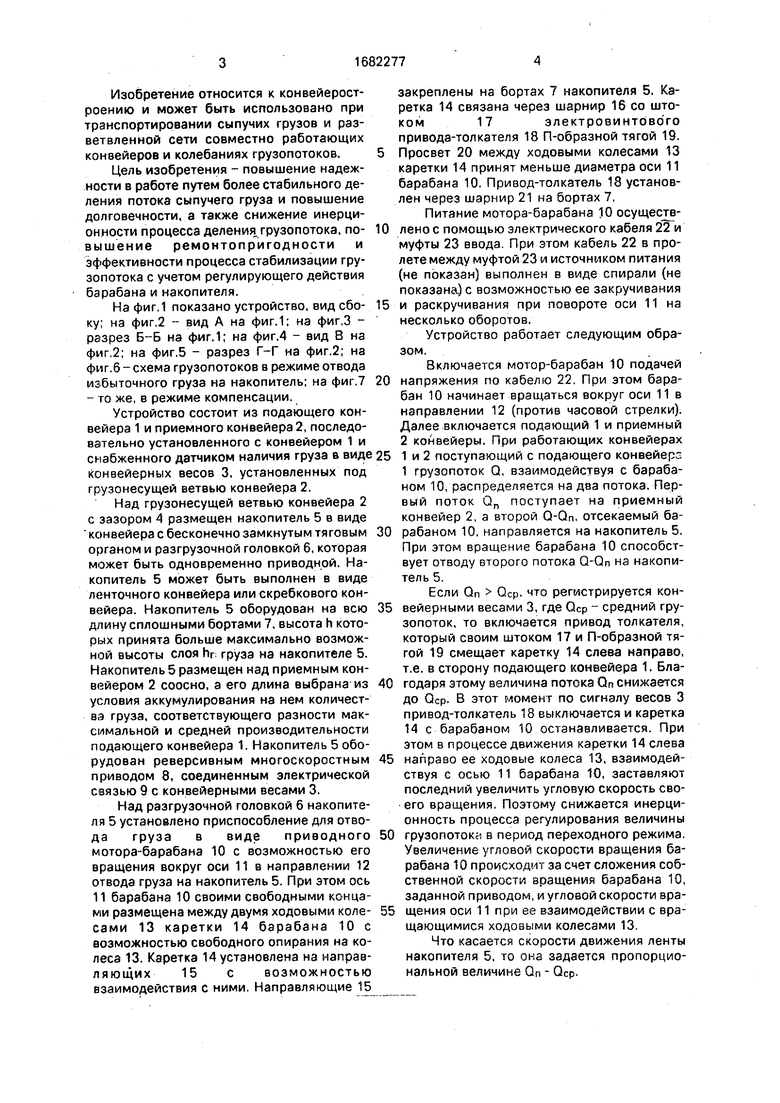
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации грузопотока конвейерной линии | 1986 |
|
SU1364577A1 |
| Крутонаклонный ленточный конвейер | 1986 |
|
SU1766786A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ СКОРОСТИ ЛЕНТЫ КОНВЕЙЕРА | 2015 |
|
RU2600404C1 |
| Устройство для промежуточной разгрузки ленточного конвейера | 1979 |
|
SU872403A1 |
| Пространственная транспортная система | 1981 |
|
SU982991A1 |
| Устройство для промежуточной разгрузки ленточного конвейера | 1990 |
|
SU1708719A1 |
| Конвейер | 1985 |
|
SU1371945A1 |
| Крутонаклонный ленточный конвейер | 1986 |
|
SU1738726A1 |
| КРУТОНАКЛОННЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2000 |
|
RU2198127C2 |
| СПОСОБ ОБРАБОТКИ СЫПУЧИХ ГРУЗОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2203207C2 |
Изобретение относится к конвейерост- роению и позволяет повысить надежность работы путем более стабильного деления потока сыпучего груза и повысить долговечность. Устройство включает последовательно расположенные подающий конвейер (К) 1 и приемный К 2, размещенный с зазором над грузонесущей ветвью К 2 накопитель (Н) Ј k Фиг.1 т им. ЦИИ И рост- ность ения овечтельр (К) ором ль (Н) 35. Последний выполнен в виде ленточного К с расположенными по всей его длине бортами 7 с реверсивным многоскоростным приводом (П) 8 и с разгрузочной головкой 6 со стороны К 1. На бортах 7 над головкой 6 установлено приспособление для отвода груза в виде барабана 10 с П вращения вокруг оси в сторону отвода груза на Н 5. Барабан установлен на каретке, с которой шарнирно соединена П-образная тяга 19, связанная с толкающим П 18. При этом с П 8, 18 связан датчик управления, выполненный в виде установленных под грузонесущей ветвью К 2 конвейерных весов 3. Грузопоток поступаете К 1 на вращающийся в сторону Н 5 барабан 10 и два потока поступают на Н 5 и К 2. В зависимости от загруженности К 2 сигнал от конвейерных весов поступает на П 18, который перемещает барабан 10 в ту или иную сторону, перераспределяя грузопоток между К 2 и Н 5. 2 з.п. ф-лы. 7 ил. ,п А 12 11 W U713 I s-., Ю I О ( & О 00 Ю Ю XJ XI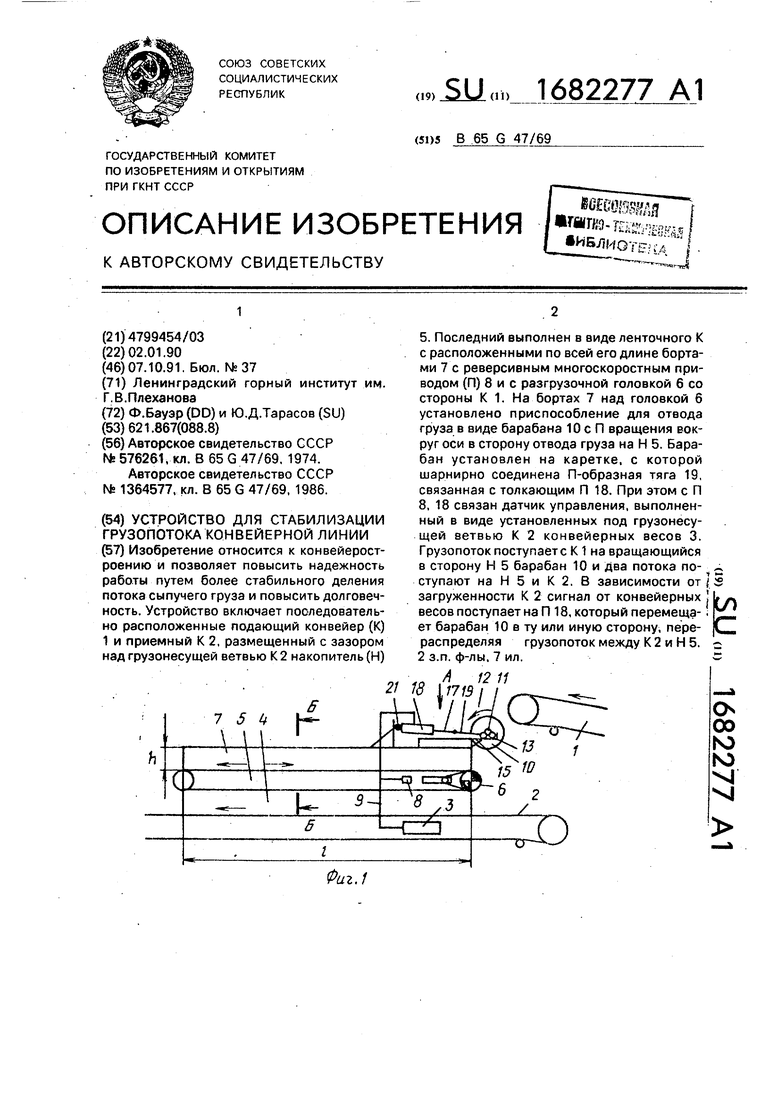
Я 18 Ml,,
Г7 V 0ч Ь
- ... - ,
..-.,Mi % «-v.f/- ....vf. ..
/г.
г-г
Ю22 23 1311
Риг.7
| Накопитель грузов | 1974 |
|
SU576261A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для стабилизации грузопотока конвейерной линии | 1986 |
|
SU1364577A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
