Изобретение относится к конвейеро- строению, а именно к устройствам для стабилизации грузопотока конвейерной линии, и может быть использовано при транспортировании сыпучих грузов при разветвленной сети совместно работающих конвейеров и колебаниях грузопотоков.
гим концо м привод-толкатель 13 шар- нирно (17) соединен с кронштейном 18, закрепленным на бортах 8.
Электрическая связь 10 конвейерных весов 2 с приводом 9 накопителя выполнена так, что при производительности Q подающего конвейера 1, превышающей среднюю производительность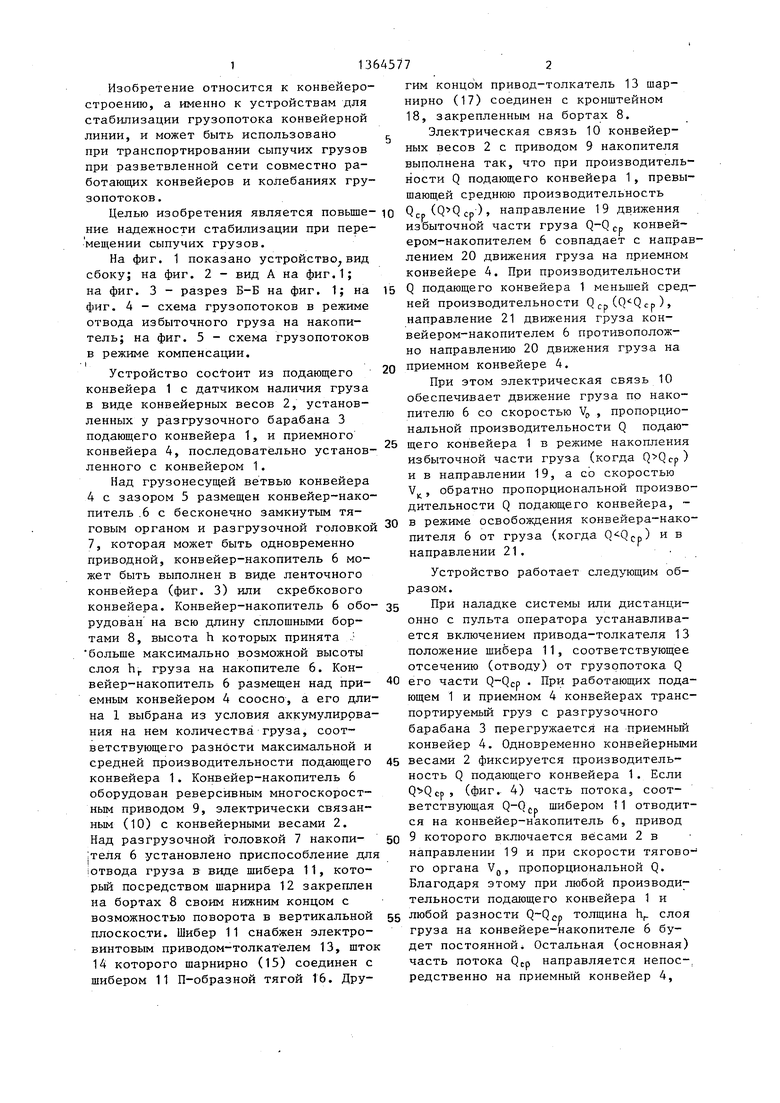
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации грузопотока конвейерной линии | 1990 |
|
SU1682277A1 |
| Перегрузочный узел ленточного конвейера | 1984 |
|
SU1433886A1 |
| Способ управления конвейерной линией | 1982 |
|
SU1500583A1 |
| Устройство для управления загрузкой ленточного конвейера | 1983 |
|
SU1090644A1 |
| Пластинчатый конвейер | 2016 |
|
RU2649116C2 |
| ВЕРТИКАЛЬНАЯ КОНВЕЙЕРНАЯ СИСТЕМА | 1995 |
|
RU2083454C1 |
| Устройство для загрузки ленточного конвейера | 1979 |
|
SU856944A1 |
| КОНВЕЙЕРНАЯ ОТКАТКА | 2016 |
|
RU2627918C2 |
| Ленточный конвейер | 1988 |
|
SU1819837A1 |
| Способ измерения грузопотока горной массы,транспортируемой ленточным конвейером,и устройство для его осуществления | 1985 |
|
SU1339409A1 |
Изобретение относится к конвей- еростроению нг м.б. использовано при транспортировании сыпучих грузов при разветвленной сети совместно работающих конвейеров (К) и колебаниях грузопотоков. Цель изобретения - повышение надежности стабилизации при перемещении сыпучих грузов (Г). У разгрузочного барабана 3 подающего К 1 ус;тановлен датчик наличия Г в виде конвейерных весов (В) 2. Последовательно с К 1 установлен приемный К 4. Под грузонесущей ветвью К 4 с зазором 5 соосно с К 4 установлен накопитель в виде ленточного К 6 с загрузочной головкой 7 со стороны К 1. По всей длине К 6 установлены борта 8. При этом К 6 оборудован реверсивным много- скоростным приводом 9, электрической связью 10 связанным с В 2. Над . головкой 7 К 6 установлено приспособление для отвода Г в виде шибера 11. Установленный с наклоном в сторону К 1 шибер 11 нижним концом посредством шарнира 12 закреплен на бортах 8 с возможностью пдворота в вертикальной плоскости. Посредством П-образ- ной тяги шибер 11 соединен с штоком 14 привода-толкателя 13. Включением последнего устанавливают положение шибера 11, соответствующее отсечению от грузопотока его части. В случае, когда производ-ть К 1 превышает среднюю производ-ть устр-ва, электрическая связь 10 В 2 с приводом 9 обеспечивает направление 19 избыточной части Г по К 6 со скоростью, пропорциональной производ-ти К 1 в режиме накопления Г. 1 з.п. ф-лы, 5 ил. (Л оо 05 4 сл -тт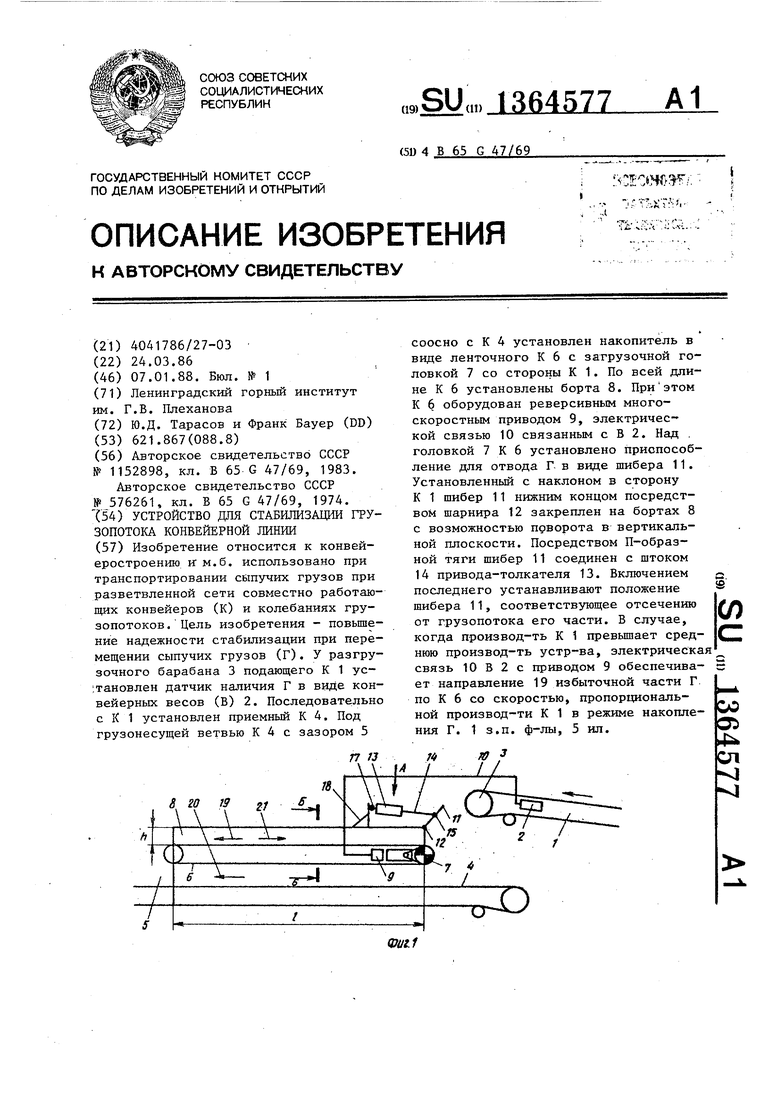
Целью изобретения является повьше- ю ) направление 19 движения
ние надежности стабилизации при пере- мещении сыпучих грузов.
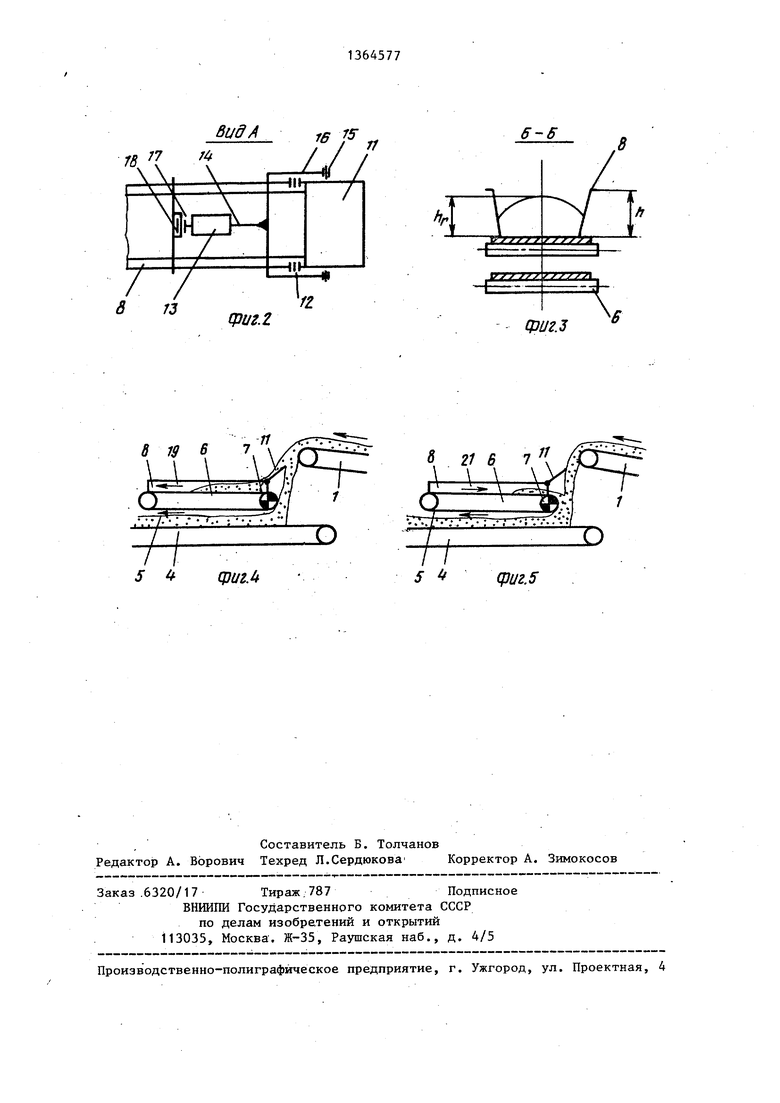
На фиг. 1 показано устройство вид сбоку; на фиг. 2 - вид А на фиг.1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - схема грузопотоков в режиме отвода избыточного груза на накопитель; на фиг. 5 - схема грузопотоков
в режиме компенсации. I
Устройство состоит из подающего
конвейера 1 с датчиком наличия груза в виде конвейерных весов 2, установленных у разгрузочного барабана 3 подающего конвейера 1, и приемного конвейера 4, последовательно установленного с конвейером 1.
Над грузонесущей ветвью конвейера 4 с зазором 5 размещен конвейер-накопитель .6 с бесконечно замкнутым тя15
20
25
избыточной части груза Q-Qср конвейером-накопителем 6 совпадает с направлением 20 движения груза на приемном конвейере 4, При производительности Q подающего конвейера 1 меньшей средней производительности Qcp(), направление 21 движения груза конвейером-накопителем 6 противоположно направлению 20 движения груза на приемном конвейере 4.
При этом электрическая связь 10 обеспечивает движение груза по накопителю 6 со скоростью VP , пропорциональной производительности Q подающего конвейера 1 в режиме накопления избыточной части груза (когда ) и в направлении 19, а со скоростью Vj, , обратно пропорциональной производительности Q подающего конвейера, говым органом и разгрузочной головкой 30 в режиме освобождения конвейера-нако7, которая может быть одновременно ° РУ ср) « в
направлении 21.
Устройство работает следующим образом.
При наладке системы или дистанционно с пульта оператора устанавливается включением привода-толкателя 13 положение шибера 11, соответствующее отсечению (отводу) от грузопотока Q его части Q-Qcp . При работающих подающем 1 и приемном 4 конвейерах транспортируемый груз с разгрузочного барабана 3 перегружается на приемный конвейер 4. Одновременно конвейерными весами 2 фиксируется производительность Q подающего конвейера 1. Если (фиг. 4) часть потока, соответствующая Q-Q(;p шибером 11 отводит40
45
приводной, конвейер-накопитель 6 может быть выполнен в виде ленточного конвейера (фиг. 3) или скребкового конвейера. Конвейер-накопитель 6 обо- 35 рудован на всю длину сплошными бортами 8, высота h которых принята .; больше максимально возможной высоты слоя h груза на накопителе 6. Конвейер-накопитель 6 размещен над приемным конвейером 4 соосно, а его длина 1 выбрана из условия аккумулирования на нем количества груза, соответствующего разности максимальной и средней производительности подающего конвейера 1. Конвейер-накопитель 6 оборудован реверсивным многоскоростным приводом 9, электрически связанным (10) с конвейерными весами 2. Над разгрузочной головкой 7 накопи- ;теля 6 установлено приспособление для 1отвода груза в виде шибера 11, кото- рьй посредством шарнира 12 закреплен на бортах 8 своим нижним концом с возможностью поворота в вертикальной плоскости. Шибер 11 снабжен электровинтовым приводом-толкателем 13, шток 14 которого шарнирно (15) соединен с шибером 11 П-образной тягой 16. Дру50
ся на конвейер-накопитель 6, привод 9 которого включается весами 2 в направлении 19 и при скорости тягового органа Vg, пропорциональной Q. Благодаря этому при любой производительности подающего конвейера 1 и 55 любой разности толщина h слоя груза на конвейере-накопителе 6 будет постояннойi Остальная (основная) часть потока направляется непос-, редственно на приемный конвейер 4,
) направление 19 движения
избыточной части груза Q-Qср конвейером-накопителем 6 совпадает с направлением 20 движения груза на приемном конвейере 4, При производительности Q подающего конвейера 1 меньшей средней производительности Qcp(), направление 21 движения груза конвейером-накопителем 6 противоположно направлению 20 движения груза на приемном конвейере 4.
При этом электрическая связь 10 обеспечивает движение груза по накопителю 6 со скоростью VP , пропорциональной производительности Q подающего конвейера 1 в режиме накопления избыточной части груза (когда ) и в направлении 19, а со скоростью Vj, , обратно пропорциональной производительности Q подающего конвейера, При наладке системы или дистанционно с пульта оператора устанавливается включением привода-толкателя 13 положение шибера 11, соответствующее отсечению (отводу) от грузопотока Q его части Q-Qcp . При работающих подающем 1 и приемном 4 конвейерах транспортируемый груз с разгрузочного барабана 3 перегружается на приемный конвейер 4. Одновременно конвейерными весами 2 фиксируется производительность Q подающего конвейера 1. Если (фиг. 4) часть потока, соответствующая Q-Q(;p шибером 11 отводит5
0
ся на конвейер-накопитель 6, привод 9 которого включается весами 2 в направлении 19 и при скорости тягового органа Vg, пропорциональной Q. Благодаря этому при любой производительности подающего конвейера 1 и 5 любой разности толщина h слоя груза на конвейере-накопителе 6 будет постояннойi Остальная (основная) часть потока направляется непос-, редственно на приемный конвейер 4,
который обеспечивает производитель- ность грузопотока , Если (фиг. 5), весь поток Q поступает на приемный конвейер 4. Одновременно весы 2 включают привод 9 конвейера- накопителя 6 в направлении 21 и при скорости тягового органа V, обратно пропорциональной Q. Благодаря этому при любой производительности Q(QSO) подающего конвейера 1 в данньм период его работы на приемньш конвейер 4 через разгрузочную головку 7 подается недостающее до Q,. количество груза т.е. конвейер-накопитель 6 работает в режиме компенсации. Поэтому приемный конвейер 4, как и в предыдущем случае, обеспечивает заданную производительность грузопотока Q
ср
При этом скорости УО и V конвейера-накопителя 6 могут изменяться как непрерывно, так и дискретно. В зависимости от этого производительность Qj-p приемного конвейера 4 будет выдерживаться близкой к постоянной или же колебаться в небольших допустимых пределах. Скорости движения тягового органа конвейера-накопителя 6 принимаются на порядок меньшими скоростей движения груза на подающем 1 и приемном 4 конвейерах в пределах 0,05- 0,2 м/с. Необходимое количество аккумулируемого груза на накопителе 6
обеспечивается за счет высоты hj. слоя груза на нем, обеспечиваемого бортами 8, установленными на всю длину 1 конвейера-накопителя 6.
Поскольку длина 1 конвейера-накопителя 6 выбирается из условия размещения на нем количества груза при максимально возможных в данных условиях колебаниях грузопотока, происходит устойчивое сглаживание (усреднение) грузопотока практически при любых его колебаниях на подающем конвейере 1. Ограничение конвейера-накопителя 6 по длине 1 практически отсутствует, в том числе и на подземных конвейерах, поэтому область применения такой системы стабилизации грузопотока достаточно широка. В частном случае, когда (. , весь поток груза направляется на приемный конвейер 4. В этот период привод 9
конвенера-накопителя о отключен, так как весы 2 не дают сигнала на его включение.
Система может работать и в режиме переполнения, хотя этот случай может быть исключен увеличением длины 1 конвейера-накопителя 6; при полностью загруженном конвейере-накопителе 6 и дальнейшем поступлении избыточного грузопотока Q-Qcp накопитель может разгружаться через противоположную сторону при направлении 19 движения и уменьшенной скорости Vp. 5 В этом случае происходит прирап1ение грузопотока (Q-Qcp ) - Q-Qcp , где(р 0
Qcp)
0
5
0
5
0
5
0
5
- производительность конвеи- ра-накопителя 6 при уменьшенной скорости Уд. Поэтому колебание грузопотока также частично сглаживается.
Формула изобретения
и поворотного в вертикальной плоскости от привода толкателя через тягу элемента и датчик управления, отличающееся тем, что, с целью повьш1ения надежности стабилизации при перемещении сыпучих грузов, накопитель выполнен в виде ленточного конвейера с расположенными по всей его длине бортами, с реверсивным многоскоростным приводом и с разгрузочной головкой со стороны подающего конвейера., а приспособление для отвода груза выполнено в виде шибера, шарнирно установленного на бо1этах над разгрузочной головкой накопителя, при этом тяга выполнена П-образной, а датчик управления - в виде конвейерных весов, установленных у разгрузочного барабана подающего конвейера и электрически связанных с приводом накопителя.
ВидА
vVA
S 73
HI
fpU2.Z
fZ
Г19 6 7 Л /:.;
u L.Xr-P
I
IJ
I S 4
сригМ
6-Б
Фиг.з
8 21 6
S «
CPU г. 5
| Участок поточной линии перемещения изделий | 1983 |
|
SU1152898A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Накопитель грузов | 1974 |
|
SU576261A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
