Изобретение относится к подъемным устройствам, а именно к -автооператорам для автоматических поточных линий.
Цель изобретения - снижение металлоемкости и повышение безопасности путем снижения возможности раскачивания груза при подъеме.
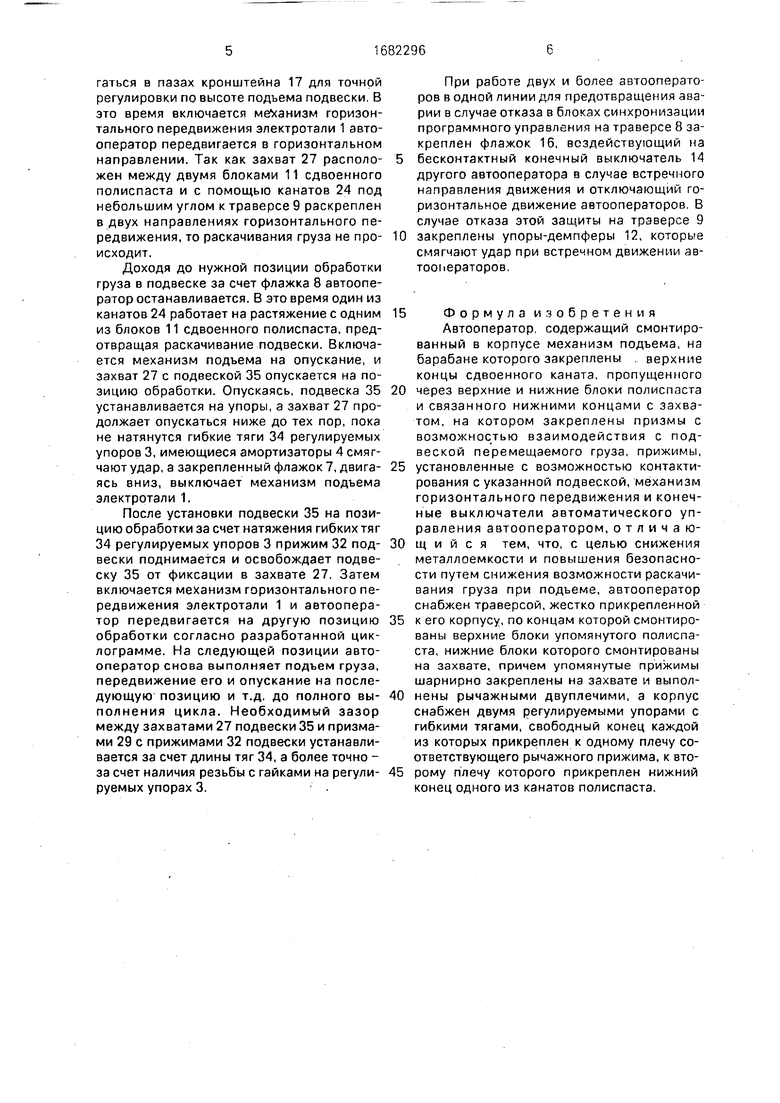
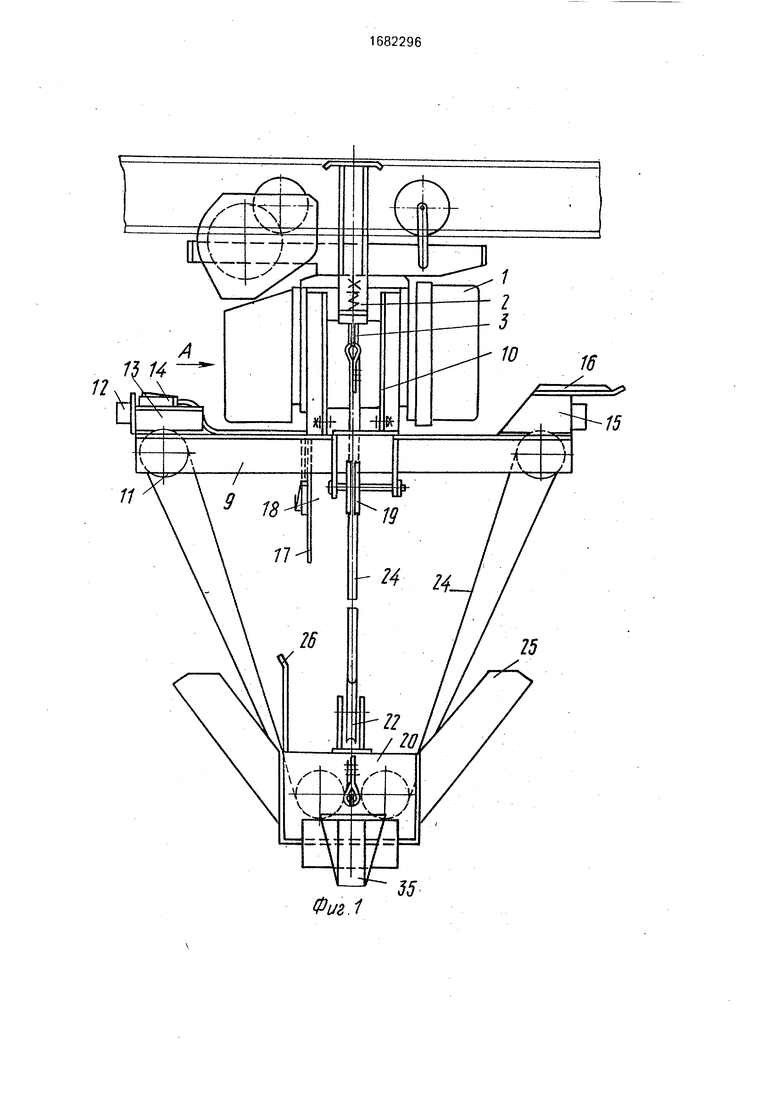
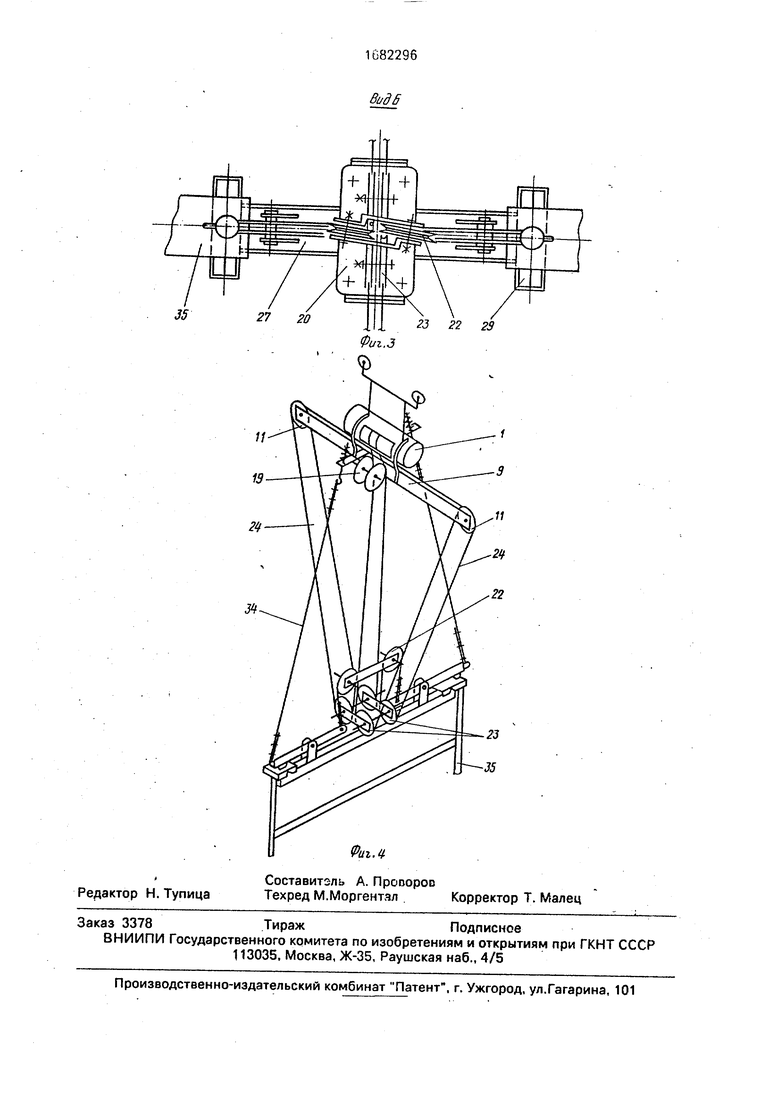
На фиг, 1 показан автооператор с опущенным захватом, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 2; на фиг. 4 - схема запасовки канатов в блоках сдвоенных полиспастов.
Автооператор содержит электроталь 1 с механизмом передвижения, барабанным механизмом подъема и с закрепленными на его корпусе кронштейнами 2 для гибких регулируемых упоров 3 с амортизаторами 4, кроншейн 5 с бесконтактным конечным выключателем 6, флажком 7, закрепленный за один из регулируемых упоров 3 кронштейн 8 с флажком, траверсу 9, закрепленную за корпус электротали 1 с помощью кронштейнов 10. Траверса 9 содержит верхние блоки 11 сдвоенного полиспаста, упоры-демпферы 12, кронштейн 13 с бесконтактным конечным выключателем 14, кронштейн 15 с флажком 16, кронштейн 17 с бесконтактным конечным выключателем 18, отклоняющие блоки 19 сдвоенного полиспаста. Коробка 20 сдвоенного полиспаста содержит корпус 21с блоками 22, нижние блоки 23 сдвоенного полиспаста, охваченные канатами 24, ограждение 25, флажок 26. Захват 27 подвески содержит балку 28, на которой закреплены призмы 29, стойки 30, двуплечие рычажные прижимы 31, прижимы 32 подвески, полукольца 33 для крепления гибких тяг 34 регулируемых упоров 3. Груз содержит подвеску 35 и детали, загруженные в нее.
Автооператор работает в двух режимах: наладочном и автоматическом.
В наладочном режиме управление работой автооператоров осуществляется с помощью поста управления (не показан).
Включением кнопок Вверх, Вниз, Вперед и Назад производят движение захватом 27 подвески и движения автооператора па подвесному пути над позициями операции технологического процесса.
В автоматическом режиме управление работой автооператора осуществляется с помощью программного управления, разработанного под необходимый технологический процесс на основе циклограммы. Подвески 35 с деталями находятся на исходных позициях. Автооператор имеет свою исходную позицию, где он должен находиться перед началом цикла. Включается автооператор на пульте управления в автоматическую работу и с помощью механизма горизонтального перемещения электротали 1 подходит к позиции загрузки с опущенным захватом 27 и останавливается
за счет флажка кронштейна 8 и бесконтактного конечного выключателя, установленного на подвесном пути (не показан), под захватами подвески 35. Если не предусмотрена остановка автооператора, включается механизм подъема и за счет движения канатов 24 вверх через систему блоков 11, 19,22 и 23 сдвоенных полиспастов захват 27 поднимается и призмами 29 соприкасается с подвеской 35, но канаты 24 продолжают движение, начиная подъем подвески 35.
С другой стороны концы канатов 24, закрепленные за рычажные призмы 31, начинают поворачивать их и другим концом прижимами 32 подвески фиксируют подвеску 35 в захвате 27 автооператора. В это время выбор свободного состояния канатов 24 заканчивается и начинается подъем подвески 35, снимается нагрузка с регулируемых упоров 3 с гибкими тягами 34 и флажок 7 конечного выключателя поднимается вверх. Подвеска 35 поднимается до тех пор, пока флажок 26 не перекроет бесконтактный конечный выключатель 18, который ре5 гулирует высоту подъема подвески. Конечный выключатель 18 может передвигаться в пазах кронштейна 17 для точной регулировки по высоте подъема подвески. В это время включается механизм горизонтального передвижения электротали 1 авто- оператор передвигается в горизонтальном направлении. Так как захват 27 располо- жен между двумя блоками 11 сдвоенного полиспаста и с помощью канатов 24 под небольшим углом к траверсе 9 раскреплен в двух направлениях горизонтального передвижения, то раскачивания груза не про- исходит.
Доходя до нужной позиции обработки груза в подвеске за счет флажка 8 автооператор останавливается. В это время один из канатов 24 работает на растяжение с одним из блоков 11 сдвоенного полиспаста, предотвращая раскачивание подвески. Включается механизм подъема на опускание, и захват 27 с подвеской 35 опускается на позицию обработки. Опускаясь, подвеска 35 устанавливается на упоры, а захват 27 продолжает опускаться ниже до тех пор, пока не натянутся гибкие тяги 34 регулируемых упоров 3, имеющиеся амортизаторы 4 смягчают удар, а закрепленный флажок 7, двига- ясь вниз, выключает механизм подъема электротали 1,
После установки подвески 35 на позицию обработки за счет натяжения гибких тяг 34 регулируемых упоров 3 прижим 32 под- вески поднимается и освобождает подвеску 35 от фиксации в захвате 27. Затем включается механизм горизонтального передвижения электротали 1 и автооператор передвигается на другую позицию обработки согласно разработанной циклограмме, На следующей позиции автооператор снова выполняет подъем груза, передвижение его и опускание на последующую позицию и т.д. до полного вы- полнения цикла. Необходимый зазор между захватами 27 подвески 35 и призмами 29 с прижимами 32 подвески устанавливается за счет длины тяг 34, а более точно - за счет наличия резьбы с гайками на регули- руемых упорах 3.
При работе двух и более автооператоров в одной линии для предотвращения аварии в случае отказа в блоках синхронизации программного управления на траверсе 8 закреплен флажок 16, воздействующий на бесконтактный конечный выключатель 14 другого автооператора в случае встречного направления движения и отключающий горизонтальное движение автооператоров. В случае отказа этой защиты на траверсе 9 закреплены упоры-демпферы 12, которые смягчают удар при встречном движении ав- тооиераторов.
Формула изобретения Автооператор, содержащий смонтированный в корпусе механизм подъема, на барабане которого закреплены верхние концы сдвоенного каната, пропущенного через верхние и нижние блоки полиспаста и связанного нижними концами с захватом, на котором закреплены призмы с возможностью взаимодействия с подвеской перемещаемого груза, прижимы, установленные с возможностью контактирования с указанной подвеской, механизм горизонтального передвижения и конечные выключатели автоматического управления автооператором, отличающийся тем, что, с целью снижения металлоемкости и повышения безопасности путем снижения возможности раскачивания груза при подъеме, автооператор снабжен траверсой, жестко прикрепленной к его корпусу, по концам которой смонтированы верхние блоки упомянутого полиспаста, нижние блоки которого смонтированы на захвате, причем упомянутые прижимы шарнирно закреплены на захвате и выполнены рычажными двуплечими, а корпус снабжен двумя регулируемыми упорами с гибкими тягами, свободный конец каждой из которых прикреплен к одному плечу соответствующего рычажного прижима, к второму плечу которого прикреплен нижний конец одного из канатов полиспаста.
Фиг.1
ВидВ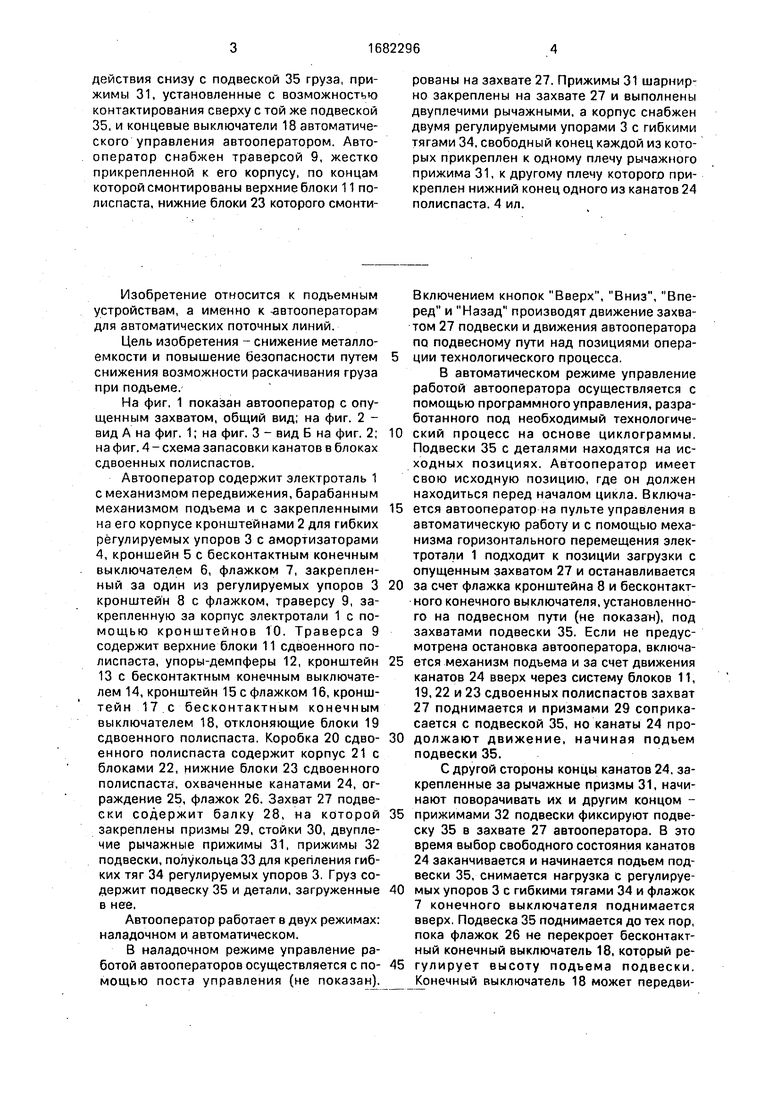
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм подъема подвесок автооператора | 1984 |
|
SU1180408A1 |
| Башенный кран | 1978 |
|
SU775043A1 |
| Подвеска грузозахватного устройства | 1983 |
|
SU1119967A1 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ | 1994 |
|
RU2077470C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ РАЗВОРОТЧИК-УСПОКОИТЕЛЬ РАСКАЧИВАНИЯ ГРУЗОЗАХВАТНОГО ОРГАНА | 1993 |
|
RU2048421C1 |
| СУДОВОЙ КРАН ДЛЯ БЕЗУДАРНОЙ ПЕРЕГРУЗКИ ГРУЗОВ НРИ КАЧКЕ | 1971 |
|
SU417340A1 |
| Ограничитель высоты подъема грузовой подвески козлового крана | 1982 |
|
SU1084232A1 |
| Установка для обработки отверстий в крупногабаритных деталях | 1989 |
|
SU1708540A1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ ГРУЗА | 2002 |
|
RU2223216C1 |
Изобретение относится к подъемным устройствам, а именно к автооператорам для автоматических поточных линий. Цель Вид А изобретения - снижение металлоемкости и повышение безопасности путем снижения возможности раскачивания груза при подь- еме. Автооператор содержит смонтированные в корпусе механизмы горизонтального передвижения и подъема - электроталь. На барабане механизма подьема закреплены верхние концы сдвоенного каната 24, пропущенного через верхние 11 и нижние 23 блоки полиспаста и связанного нижними концами с захватом 27, на котором закреплены призмы 29 с возможностью взаимо
Фиг Л
| АВТООПЕРАТОР АММ 2 ДЛЯ ГАЛЬВАНИЧЕСКИХ ЛИНИЙ | 0 |
|
SU272755A1 |
| кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
