&
Изобретение относится к гальвано химической обработке изделий, в частности к устройствам подъема подвесок автооператора.
Цель изобретения - повышение надежности в работе.
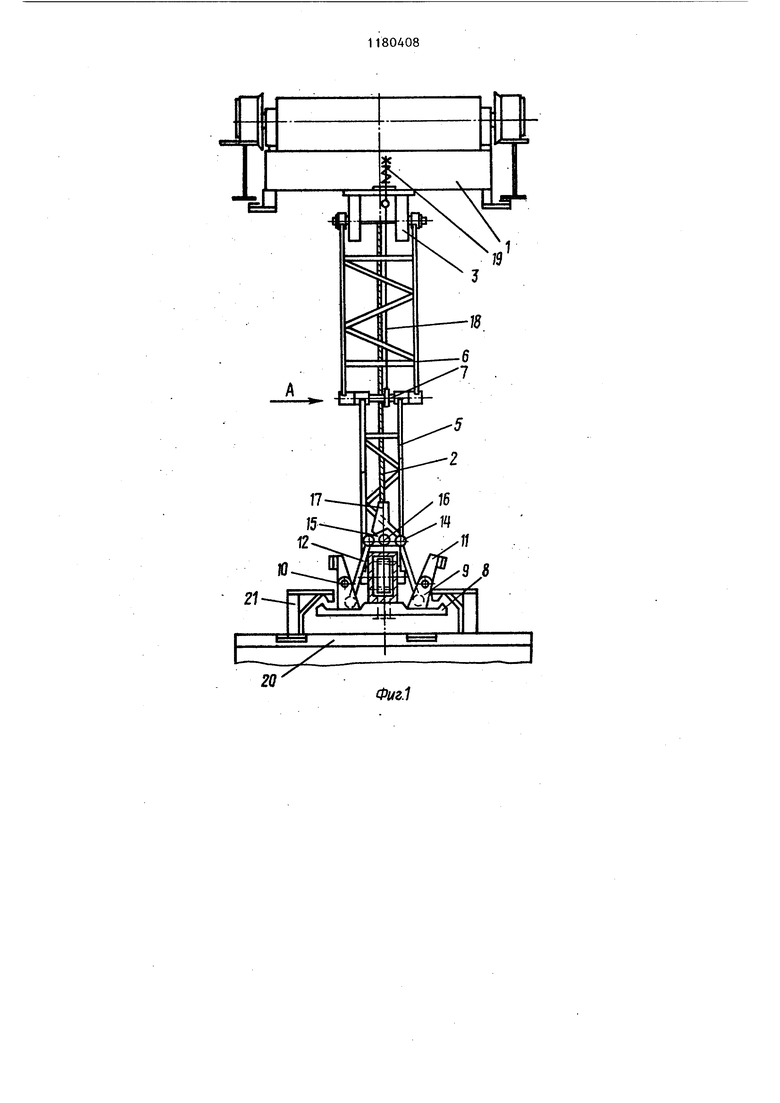
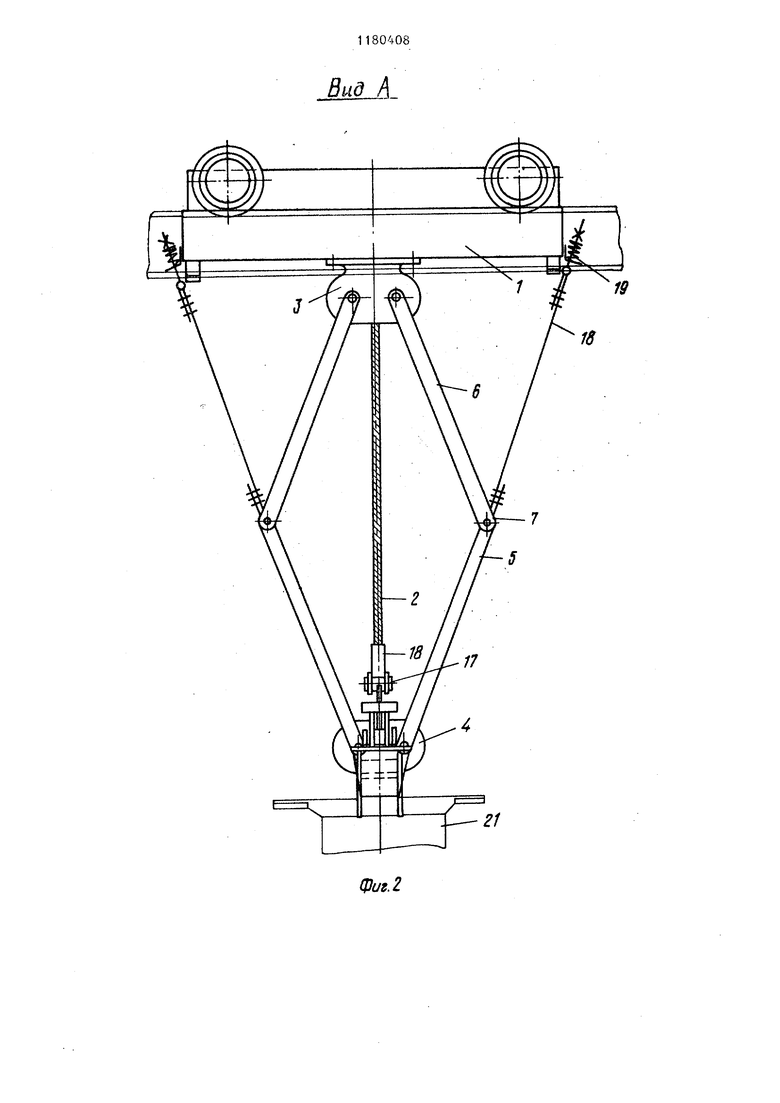
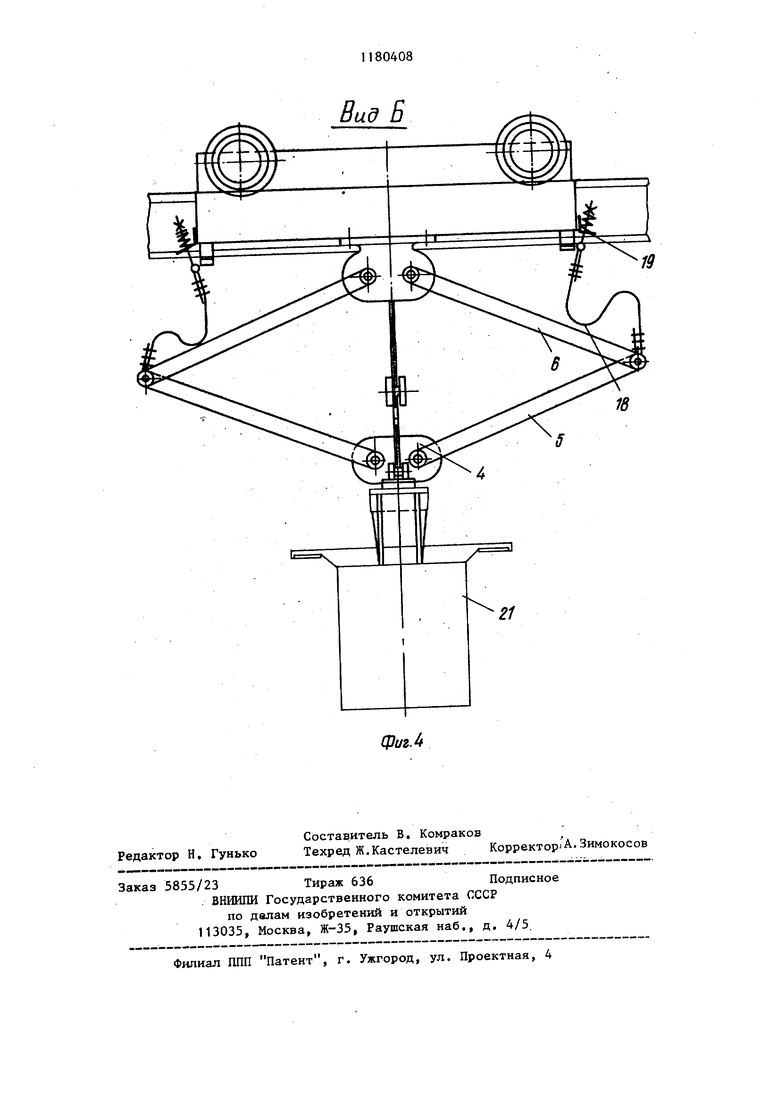
На фиг. 1 изображен механизм подъема подвесок автооператора, исходное положение; на фиг, 2 - вид А на фиг. 1} на фиг. 3 - механизм подъема подвесок автооператора с поднятой подвеской; на фиг. 4 - вид Б на фиг. 3.
Механизм подъема подвесок автооператора содержит раму 1 и расположенньш в ней тяговый механизм с канатом 2, многозвенньй рычажный механизм - пантограф, состоящий из верхнего 3 и нижнего 4 (фиг. 2) блоков шестерен, соединенных между собой рычагами 5 и 6, закрепленными на оси 7, траверсы 8 с закрепленными -на ней кронштейнами 9, в которых на осях 10 перемещаются рычаги 11, соединенные с тягами 12 через оси 13. С другой стороны тяги 12 соединены при помощи осей 14 с серьгой 15. Серьга 15осью 16 соединена с зажимом 17 каната 2.
Для установки траверсы 8 в нижнее положение ( фиг. 1 и 2) оси 7 рычагов 5 и 6 соединены с рамой 1 гибкими регулируемыми упорами 18,имеющими амортизаторы 19. Траверса устанавливается с зазором между верхним бортом ванны 20 и захватами подвески 21 (фиг. 1)о
Предлагаемый механизм подъема подвесок автооператора работает следующим образом.
В начале цикла работы в автоматическом реясиме управления механизм подъема подвесок автооператора перемещается с опущенной траверсой 8 (фиг. 1) под захваты одной из подве.сок 21, находящихся в агрегате или на линии. При совмещении траверсы 8 с,захватами подвески 21 по команде программного управления включается механизм подъема подвесок и усилием каната 2, направленным вверх, через зажим 17, серьгу 15 и тяги 12 рычаги 11 поворачиваются на осях 13 в сторону захватов подвески 21. При достижении рычагами 11 поверхности захватов подвески 21 и продолжении подъема тяг 12 за счет движения каната 2 вверх начинается подъем и сближение
траверсы 8 с захватами подвески 21 траверсой 8 снизу, а рьтагами 11 сверху. После полной фиксации подвески 21 в захватах механизма подъема и при дальнейшем движении каната 2 (фиг. 3) происходит подъем подвески 21 вверх на высоту, необходимую для переноса ее над ваннами агрегата или линии. При достижении верхнего положения подвески 21 механизм подъема подвески автооператора выключается согласно программному управлению и занимает положение, указанное на фиг. 3 и 4. Равноплечие рычаги 5 и 6 соединенные между собой в блоках 3 и 4, не позволяют раскачиваться подвеске 21 при подъеме, в момент трогания с места, при движении в горизонтальном направлении и при погружении в ванну на следующей позиции обработки. После подъема и вьщержки над этой позицией определенного времени, необходимого для стока жидкости с деталей И подвески, включается механизм горизонтального перемещения автооператора и подвеска 21 с деталями перемещается на другую позицию обработки, где механизм выключается и затормаживается. В это время включается механизм подъема подвесок автооператора и происходит опускание подвески 21 на очередную позицию обработки деталей. При включении электропривода отключается тормоз, канат 2 разматывается и под действием массы обрабатываемых деталей, подвески и подвижных деталей механизма подъем происходит опускание подвески 21 до тех пор, пока она не ляжет упорами на ванну очередной позиции обработки деталей, а траверса 8 продолжает опускаться ниже. Опускаясь вниз, траверса 8 на определенной высоте повисает с зазором между захватами подвески 21 и верхним бортом ванны 20. Этот зазор обеспечивается наличием гибких регулируемых упоров 18. ,Для безударного опускания траверсы
8 служат амортизаторы 19. После того как траверса 3 рычагами 5 зафик сируется на г 1бких упорах 18, нагрузка на канат 2 прекращается. Рыча ги 11 за счет массы тяг 12 и серьги 15 поворачиваются на осях 10 и освобождают захваты подвески 21 , после чего механизм выключается и затормаживает ся.
Вид Л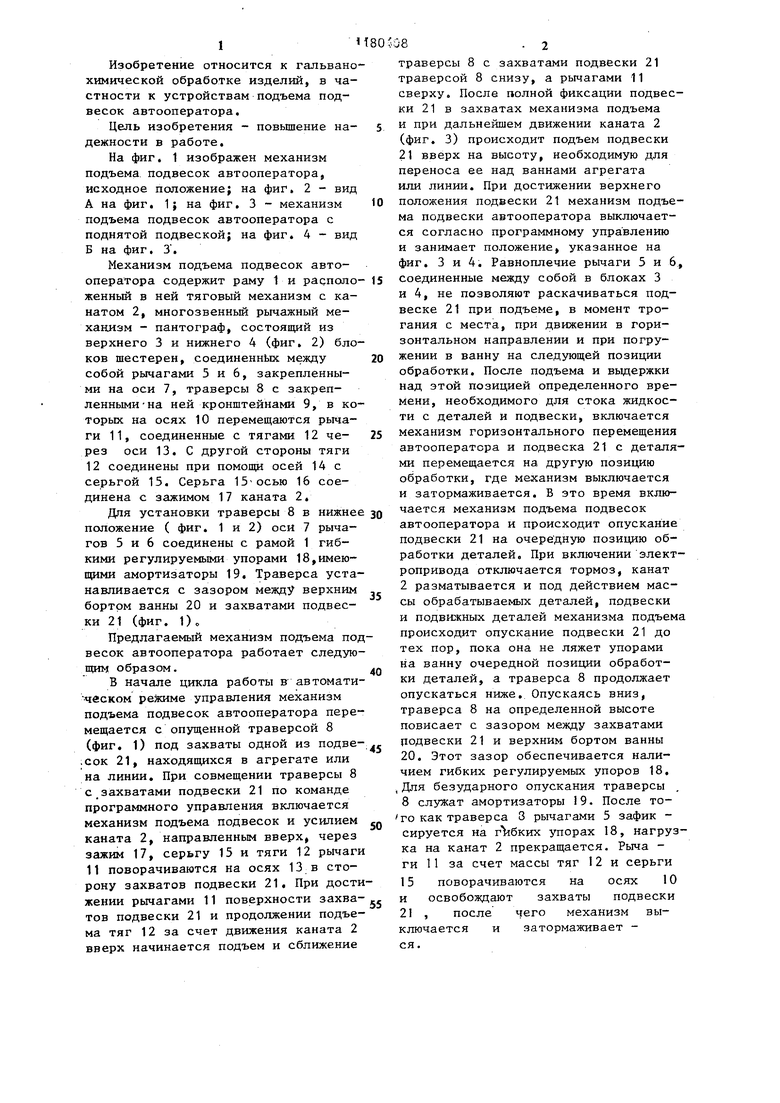
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1989 |
|
SU1682296A1 |
| Автооператор для гальванических линий | 1980 |
|
SU952704A1 |
| Автоматическая линия для химической обработки деталей | 1974 |
|
SU653199A1 |
| Автоматическая линия для гальванической и химической обработки деталей | 1985 |
|
SU1300042A1 |
| Автоматическая линия для гальванохимической обработки деталей | 1987 |
|
SU1497294A1 |
| ПОДВЕСНОЕ ЗАХВАТНОЕ УСТРОЙСТВО АВТООПЕРАТОРА ЛИНИИ ФОСФАТИРОВАНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ | 1973 |
|
SU383675A1 |
| Гальваническая автооператорная линия для обработки мелких деталей | 1981 |
|
SU986972A1 |
| Автооператор для гальванических линий | 1981 |
|
SU990889A1 |
| Устройство для обработки изделий с полостями в ваннах с жидкостью | 1972 |
|
SU707992A1 |
| Линия для химической обработки изделий | 1981 |
|
SU998586A1 |
МЕХАНИЗМ ПОДЪЕМА ПОДВЕСОК АВТООПЕРАТОРА, содержащий раму, канат тягового механизма, траверсу с закрепленным на ней шарнирным узлом многозвенного рычажного механизма и захваты, о тличающийся тем, что, с целью повьшения надежности в работе, захваты выполнены в виде кинематически связанных при помощи тяг и каната тягового механизма рычагов, размещенных на концах траверсы, а звенья многозвенного рычажного механизма соединены с рамой гибкими упорами, выполненными с возможностью регулирования.
Фиг. 2
фиг.З Вид
фиг. 4 Б
| МЕХАНИЗМ ПОДЪЕМА ПОДВЕСОК АВТООПЕРАТОРА | 0 |
|
SU291990A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Механизм подъема подвесок автооператора | 1974 |
|
SU554320A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
