Изобретение относится к автоматизации производственных процессов в машиностроении и предназначается для загрузки и выгрузки технологических машин (станков, приборов, автоматов контроля), отдельно установленных или встроенных в автоматические линии.
Цель изобретения - повышение надежности в работе автооператора.
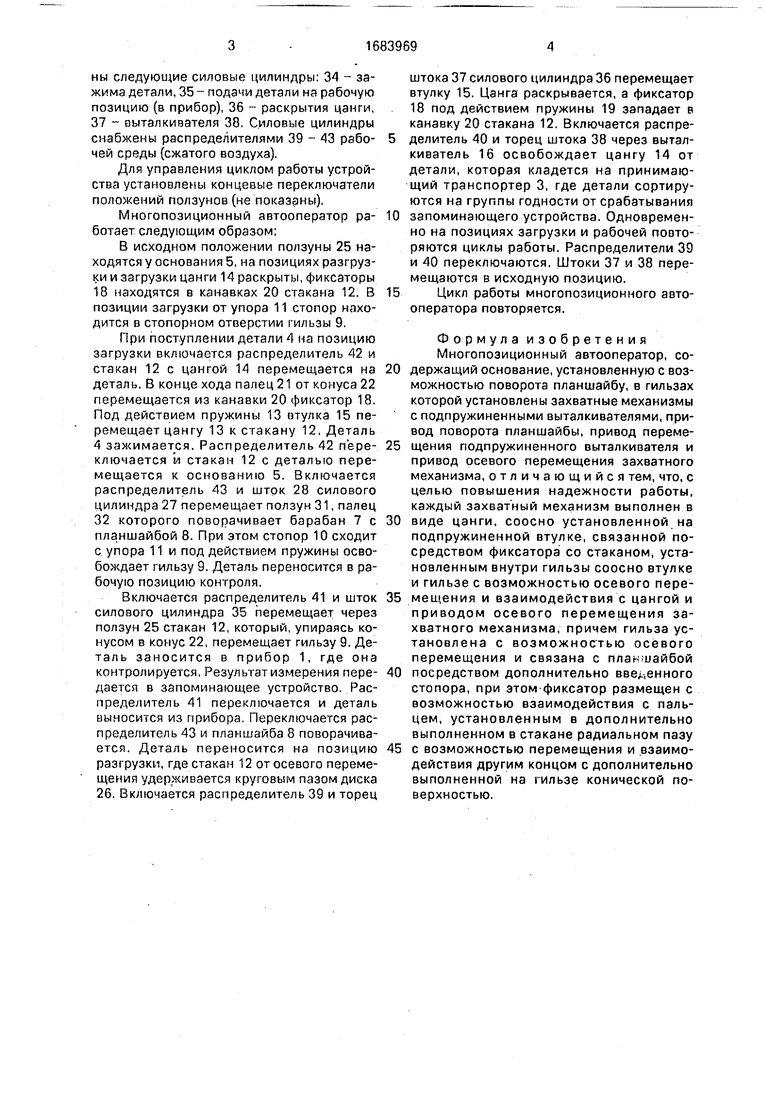
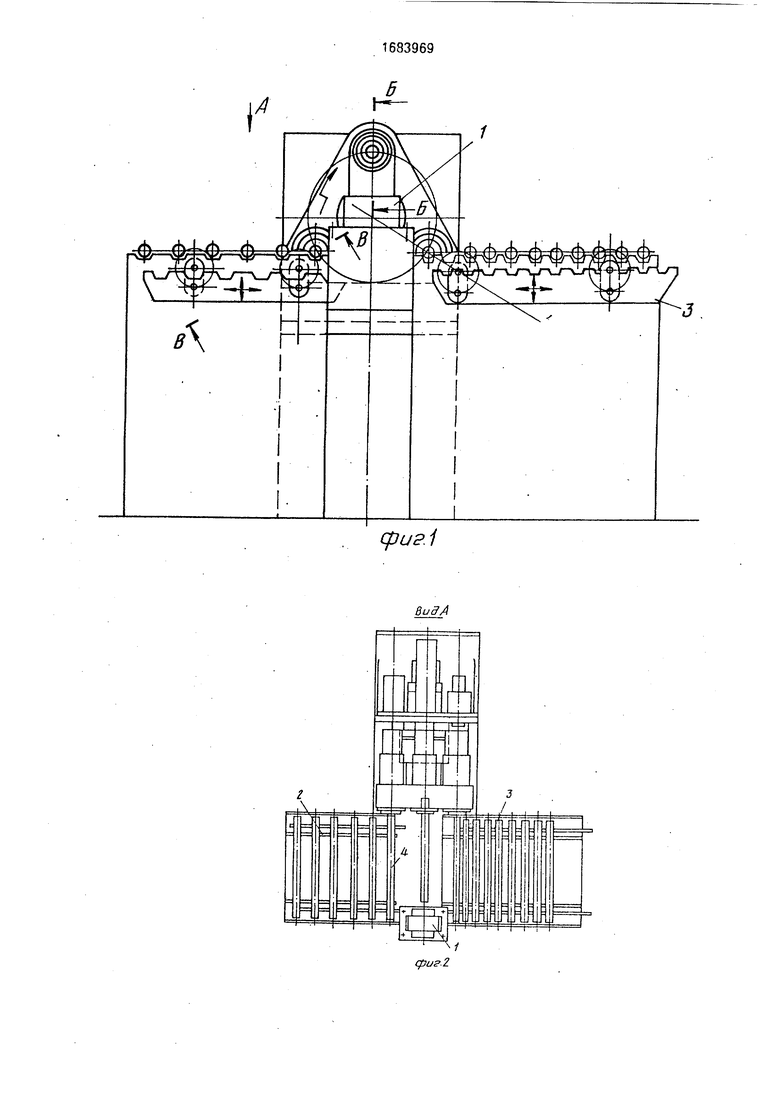
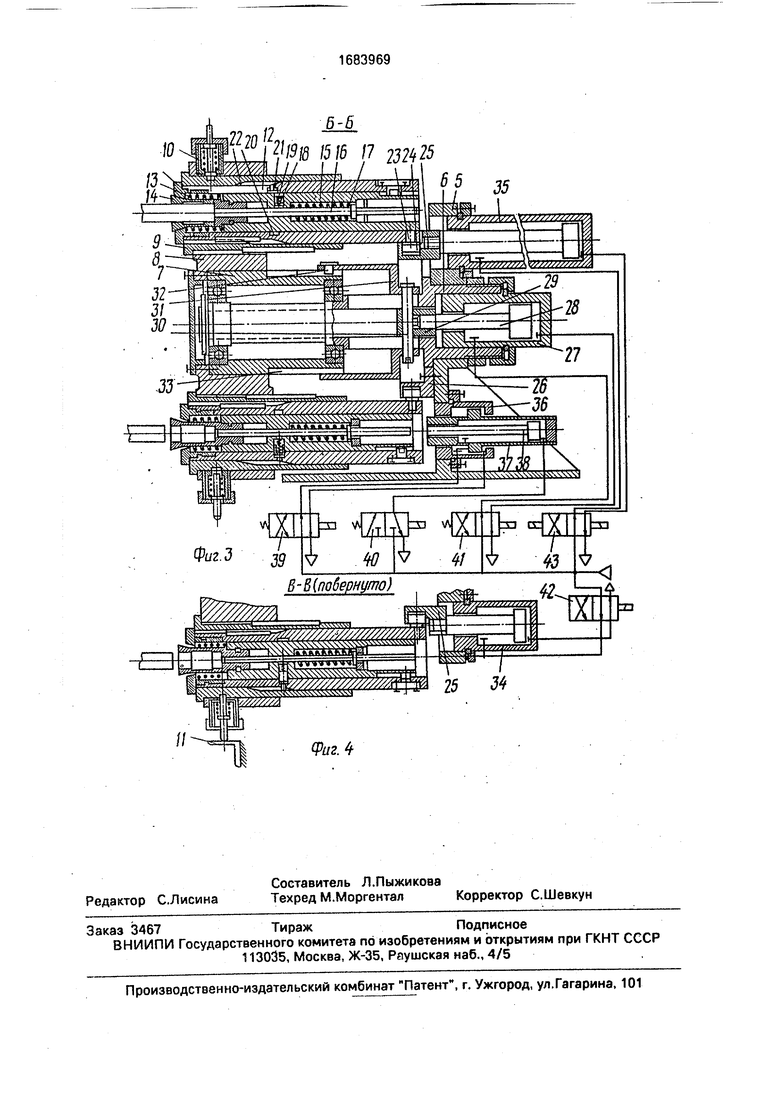
На фиг.1 схематически изображен автооператор, общий вид; на фиг.2 - вид А на фиг.1; на фиг.З - разрез Б - Б на фиг.1; на фиг.4 - разрез В - В на фиг.1.
Многопозиционный автооператор устанавливается у прибора 1 с подающим 2 и принимающим 3 транспортерами детали 4.
Многопозиционный автооператор состоит из основания 5, в котором закреплена ось 6 поворотно-делительного барабана 7 планшайбы 8.
В каждой позиции планшайбы 8 установлена гильза 9 со стопором 10, взаимодействующим в позиции загрузки с упором 11. В гильзе 9 размещен стакан 12, контактирующий поддействием пружины 13 с цангой 14. Цанга 14 закреплена на втулке 15, несущей выталкиватель 16 с пружиной 17, фиксатор 18с пружиной 19 Стакан 12 имеет канавку 20, в которой размещен палец 21, взаимодействующий с конусом 22 гильзы 9 и фиксатором 18. Стакан 12 снабжен поводком, выполненным в виде пальца 23 и ролика 24, размещенного в круговом пазу, выполненном в ползунах 25 и неподвижном диске 26,
На торце оси 6 установлен силовой цилиндр 27, шток 28 которого через переходник 29, палец 30 соединен ползуном 31 с пальцем 32, взаимодействующим с наклонными пазами 33 На основании 5 установле 0 00
ы о о
Ю
ны следующие силовые цилиндры: 34 - зажима детали, 35 - подачи детали на рабочую позицию (в прибор), 36 - раскрытия цанги, 37 - выталкивателя 38, Силовые цилиндры снабжены распределителями 39 - 43 рабочей среды (сжатого воздуха).
Для управления циклом работы устройства установлены концевые переключатели положений ползунов (не показаны).
Многопозиционный автооператор работает следующим образом;
В исходном положении ползуны 25 находятся у основания 5, на позициях разгрузки и загрузки цанги 14 раскрыты, фиксаторы 18 находятся в канавках 20 стакана 12. В позиции загрузки от упора 11 стопор находится в стопорном отверстии гильзы 9.
При поступлении детали 4 на позицию загрузки включается распределитель 42 и стакан 12 с цангой 14 перемещается на деталь. В конце хода палец 21 от конуса 22 перемещается из канавки 20 фиксатор 18. Под действием пружины 13 втулка 15 перемещает цангу 13 к стакану 12. Деталь 4 зажимается. Распределитель 42 переключается и стакан 12 с деталью перемещается к основанию 5. Включается распределитель 43 и шток 28 силового цилиндра 27 перемещает ползун 31, палец 32 которого поворачивает барабан 7 с планшайбой 8. При этом стопор 10 сходит с упора 11 и под действием пружины освобождает гильзу 9. Деталь переносится в рабочую позицию контроля.
Включается распределитель 41 и шток силового цилиндра 35 перемещает через ползун 25 стакан 12, который, упираясь конусом в конус 22, перемещает гильзу 9. Деталь заносится в прибор 1, где она контролируется, Результат измерения передается в запоминающее устройство. Распределитель 41 переключается и деталь выносится из прибора. Переключается распределитель 43 и планшайба 8 поворачивается. Деталь переносится на позицию разгрузки, где стакан 12 от осевого перемещения удерживается круговым пазом диска 26. Включается распределитель 39 и торец
штока 37 силового цилиндра 36 перемещает втулку 15. Цанга раскрывается, а фиксатор 18 под действием пружины 19 западает в канавку 20 стакана 12. Включается распределитель 40 и торец штока 38 через выталкиватель 16 освобождает цангу 14 от детали, которая кладется на принимающий транспортер 3, где детали сортируются на группы годности от срабатывания
запоминающего устройства. Одновременно на позициях загрузки и рабочей повторяются циклы работы. Распределители 39 и 40 переключаются. Штоки 37 и 38 перемещаются в исходную позицию.
Цикл работы многопозиционного автооператора повторяется.
Формула изобретения Многопозиционный автооператор, содержащий основание, установленную с возможностью поворота планшайбу, в гильзах которой установлены захватные механизмы с подпружиненными выталкивателями, привод поворота планшайбы, привод перемещения подпружиненного выталкивателя и привод осевого перемещения захватного механизма, отличающийся тем, что, с целью повышения надежности работы, каждый захватный механизм выполнен в
виде цанги, соосно установленной на подпружиненной втулке, связанной посредством фиксатора со стаканом, установленным внутри гильзы соосно втулке и гильзе с возможностью осевого перемещения и взаимодействия с цангой и приводом осевого перемещения захватного механизма, причем гильза установлена с возможностью осевого перемещения и связана с планшайбой
посредством дополнительно введенного стопора, при этом фиксатор размещен с возможностью взаимодействия с пальцем, установленным в дополнительно выполненном в стакане радиальном пазу
5 с возможностью перемещения и взаимодействия другим концом с дополнительно выполненной на гильзе конической поверхностью.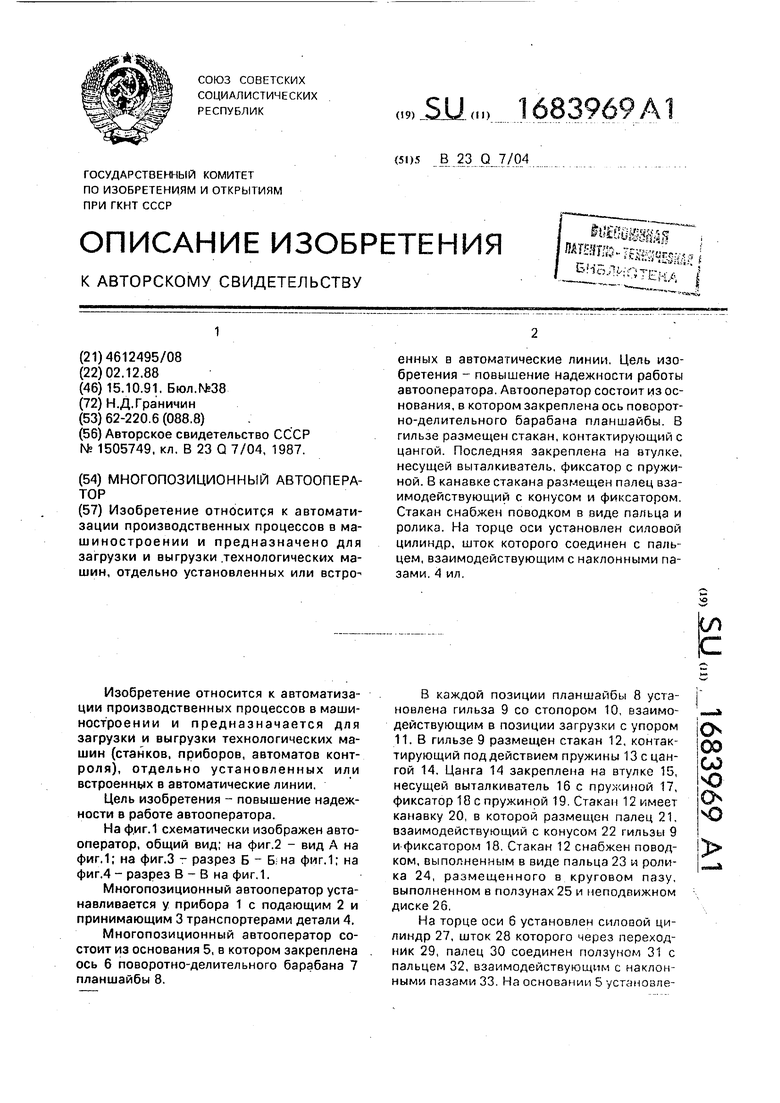
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТ ДЛЯ СБОРКИ УЗЛОВ | 1991 |
|
RU2022752C1 |
| Автооператор | 1986 |
|
SU1379055A1 |
| Автооператор | 1983 |
|
SU1144842A2 |
| Многопозиционный автомат для сборки узлов | 1978 |
|
SU747685A1 |
| МАНИПУЛЯТОР | 2002 |
|
RU2228259C2 |
| Станок для сборки узлов | 1977 |
|
SU677801A1 |
| Захват автооператора | 1981 |
|
SU1038183A1 |
| Загрузочное устройство к станку для обработки деталей | 1984 |
|
SU1310165A1 |
| Устройство для загрузки | 1980 |
|
SU929393A2 |
| Машина для сварки трением | 1982 |
|
SU1092023A1 |
Изобретение относится к автоматизации производственных процессов в машиностроении и предназначено для загрузки и выгрузки технологических машин, отдельно установленных или встроенных в автоматические линии. Цель изобретения - повышение надежности работы автооператора. Автооператор состоит из основания, в котором закреплена ось поворотно-делительного барабана планшайбы. В гильзе размещен стакан, контактирующий с цангой. Последняя закреплена на втулке, несущей выталкиватель, фиксатор с пружиной. В канавке стакана размещен палец взаимодействующий с конусом и фиксатором Стакан снабжен поводком в виде пальца и ролика. На торце оси установлен силовой цилиндр, шток которого соединен с пальцем, взаимодействующим с наклонными пазами, 4 ил.
Л
Г1
I ч |
м
п,
Б-6
ЗД0 /5/6 /7 JL/JLM
Фиг. 4
«5 да
и Т,д
У/УУ// /,
| Устройство для загрузки заготовок в патрон металлорежущего станка | 1987 |
|
SU1505749A1 |
| кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
