Изобретение относится к машино троеиию. в частности к захватам автооператоров, (1бслу 1 иза1О1цих станочные автоматические
lUHllH.
Известен захват автооператора, содержащий основание и губки, жестко соединенные с корпусом и штоком силового цилинд:;з (1J.
Недостатком известного захвата автооператора является невозможность захвата изделий с 1лироким диапазоном их размеров, что сокращает его технологические возможности.
Цель изобретения - расширение технологических возможностей путем pacujHpeния диапазонов размеров захватываемых деталей.
Указанная цель достигается тем, что захват автооператора, содержащий основание и губки, жестко соединенные с корпусом и штоком силового цилиндра, снабжен пружиной, установленной на щтоке силового цилиндра, корпус которого установлен в основании с, возможностью перемещения, а основание снабжено упорами, взаимодействующими с корпусом и щтоком силового ци; индра.
На чертеже изображен автооператор, общий вид.
Автооператор состоит из корпуса 1. когорый закреплен на суппорте 2 станка. На основании закреплены штанги 3, соединенные планкой 4. На штангах 3 установлена каретка 5, несупдая захваты, выполненные Б виде губок 6 и 7 с пружиной 8, соединенны.х с корпусом 9 и порщнем 10 силового цилиндра 11, размещенного в основании 12 которое и.меет упор 13, выполненный в виде уступа. В корпусе 1 закреплен щток 14 силового цилиндра 15, соединенного с кареткой 5. Силовой цилиндр 11 снабжен распределителем 16 Вдоль станка установлен щтангороликовый транспортер 17.
Автооператор работает следующим образом.
В исходно.м положении каретка 5 находится на линии центров станка, позиция транспортера 17 свободная.
При- включении цикла загрузки станка каретка 5 перемещается к транспортеру 17. Распределитель 16 переключается и губки 6 и 7 под действием пружины 8 раздвигаются. Штанги транспортера 17 соверщают рабочий ход и заготовка 18 пере.мещается иа позицию загрузки. Распределитель 16 переключается. Порщень 10 и губка 7 перемещаются вверх, а губка 6 вниз. Заготовка поднимается с транспортера 17 и
зажимается в губках 6 и 7. Под действием массы заготовки 18 корпус 9 силового цилиндра 11 перемещается в основании 12 вниз до упора 13. Далее каретка 5 с заготовкой 18 перемещается на линию центров станка. Суппорт 2 совершает уоюренный
ход к передней бабке станка и заготовка зажимается на оправке станка. Распределитель 16 переключается и губки 6 и 7 раздвигаются. На станке совершается обработка детали. По окончании обработки распределитель 16 переключается, губки 6 и 7 зажимают, а оправка разжимает деталь. Суппорт 2 перемещается в позиции выгрузки детали на транспортер. Штанга транспортера соверщает холостой ход. Каретка 5 перемещается к транспортеру 17. Губки 6 и 7
захвата раздвигаются и деталь кладется на транспортер. Штанга транспортера 17 соверщает рабочий ход. Деталь выносится из захвата и заносится следующая заготовка 18. Пикл работы автооператора повторяется.
Автооператор компактен, прост в изготов;)ении и надежен в работе, что существенно повышает производительность и расширяет его технологические возожности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1986 |
|
SU1379055A1 |
| Многопозиционный автооператор | 1988 |
|
SU1683969A1 |
| Загрузочно-разгрузочное устройство к металлорежущему станку | 1982 |
|
SU1039689A1 |
| Автоматическая линия для обработки деталей типа валов | 1983 |
|
SU1175672A1 |
| Автооператор для смены инструментальных наладок | 1986 |
|
SU1426744A1 |
| Хонинговальный станок для обработки цилиндрических поверхностей | 1986 |
|
SU1563951A2 |
| Автооператор | 1975 |
|
SU541639A1 |
| АВТООПЕРАТОР МЕТАЛЛОРЕЖУЩИХ СТАНКОВ | 2005 |
|
RU2296039C2 |
| Автооператор | 1979 |
|
SU831513A1 |
| Автооператор | 1984 |
|
SU1191256A1 |
ЗАХВАТ АВТООПЕРАТОРА, содержащий основание и губки, жестко соединенные с корпусом и штоком силового цилиндра, отличающийся тем, что, с целью расширения технологических возможностей путем расширения диапазонов размеров захватываемых изделий, он снабжен пружиной, установленной на штоке силового цилиндра, корпус которого установлен в основании с возможностью перемещения, а основание снабжено упорами, взаимодействующими с корпусом и штоком силового цилиндра.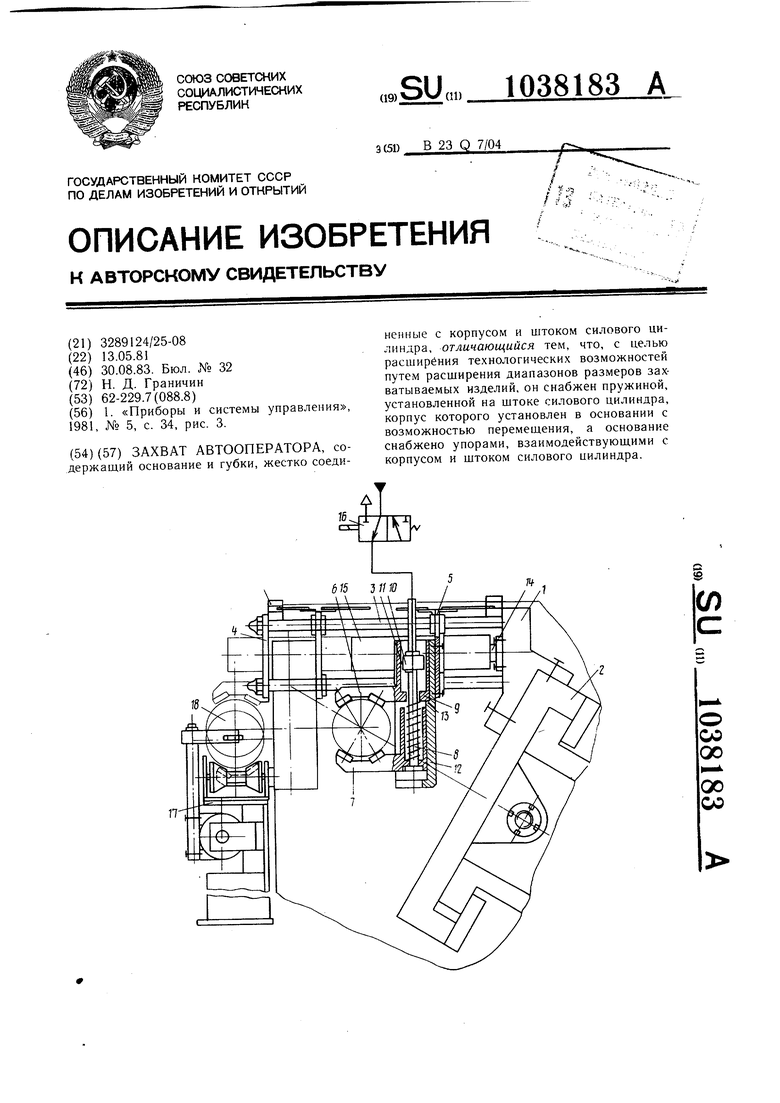
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| «Приборы и системы управления, 1981, № 5, с | |||
| Нивелир для отсчетов без перемещения наблюдателя при нивелировании из средины | 1921 |
|
SU34A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
