W
J5 32
fff
вид/f
(Л
&э
со
о
СП
ел
.
Изобретение относится к механизации загрузки металлорежущих станков.
Целью изобретения является повьше ние производительности.
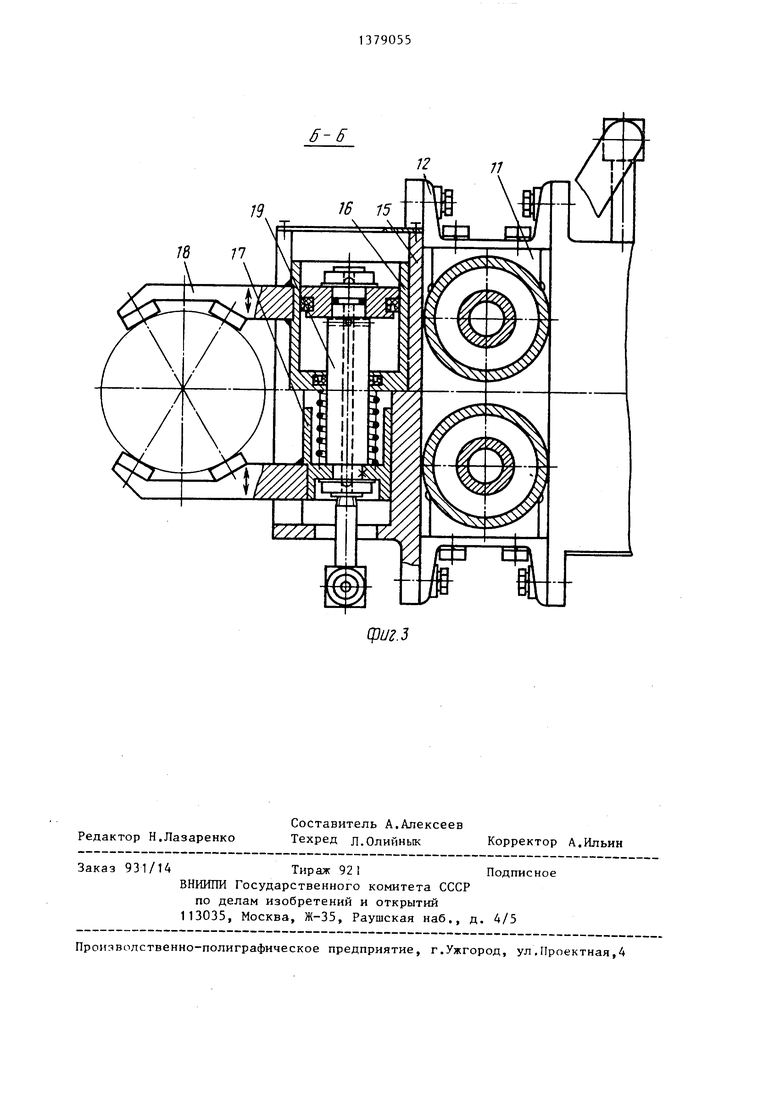
На фиг.1 изображено устройство, общий вид; на фиг.2 - вид А на фиг.1 на фиг.З - разрез Б-Б на фиг.1.
Автооператор состоит из основания на котором установлена стрела, состо ящая из двух стоек 1 и 2, жестко соединенных между собой поперечинами 3 и установленных в шарнирах 4 основания. В верхней части стоек установлены поворотные щарниры 5 и 6 травер сы. Фланцы осей шарниров жестко соединены между собой шток-поршнями 7 и 8 силовых цилиндров 9 и 10. Корпуса силовых цилиндров 9 и 10 выполнены с противоположно направленными бобьшгками 11, на которых жестко установлены балки 12 крепления противоположно направленных захватов 13 и 14. Двухзахватный механизм выполнен в виде корпуса 15, в котором разме- щены свободно перемещаемые по пружи- ненные между собой втулки 16 и 17 с губками 18, причем одна из втулок 16 выполнена в виде корпуса одностороннего силового цилиндра, шток 19 которого жестко соединен со втулкой 17. Корпус 15 выполнен с торцовым упором, к которому под действием массы втулок 16 и 17, губок 18 и шток- поршня 19 при центрировании захвата по линии центров станка прилегает торцом втулка 16. На оси шарнира 6
траверсы жестко установлено зубчатое колесо 20, которое соединяется с рейкой 21 шток-поршня 22 силового ци- линдра 23, жестко установленного на стойке . 1. На основании шарнирно установлен силовой цилиндр 24, шток 25 которого шарнирно соединен со стрелой. Подвод рабочей среды к силовым цилиндрам 9 и 10 выполнен через пустотелые штоки 7 и 8 и далее через каналы в фланцах и осях шарниров 5 и 6 траверс, а к силовому цилиндру 16 - через канал в штоке 19. Распределе- ние рабочей среды по силовым цилиндрам выполняется распределителями 26- 30. На станке 31 и основании питателя 32 установлены упоры 33 и 34 наклона стрелы.,
Автооператор работает следующим образом.
В исходной позиции I (фиг.2) стрела находится у питателя. Захваты 13
и 14 раскрыты под действием пружины. При пуске включается распределитель 29 и рабочая среда по штоку 19 поступает в силовой цилиндр. Пружина втулок 16 и 17 сжимается, губки 18 сходятся, снимают и далее зажимают заготовки 35. При этом готовая деталь 36 находится в станке 31. Переключением распределителя 26 стрела силовы цилиндром 24 наклоняется в позицию к Станку 31, при этом захват 14 раскрыт. Включается распределитель 30 и деталь 36 зажимается в захвате 14. Одновременно деталь разжимается на оправке или патроне станка. Распределитель 28 переключается и деталь 36 силовыми цилиндрами 9 и 10 снимается с оправки. Распределитель 27 переключается и силовым цилиндром 23 через рейку 21 и зубчатое колесо 20 траверсы поворачивается на 180 . Деталь 36 выносится, а заготовка 5 заносится на линию центров станка.
Распределитель 28 переключается и заготовка силовыми цилиндрами 9 и 10 заносится на оправку или в патрон, где зажимается. Распределитель 29 отключается и заготовка под действием пружины втулок 16 и 17 разжимается в захвате.
Распределитель 26 переключается и силовой цилиндр 24 возвращает стрелу в исходную позицию I, Станок включается на обработку заготовки. Распределитель 30 отключается и захват раскрывается. Деталь кладется на транспортер. При поступлении по транспортеру следующей заготовки цикл работы автооператора повторяется.
Формула изобретения
Автооператор, содержащий двухзах- ватный механизм зажима, размещенный на стреле, установленной на основании с возможностью поворота, отличающийся тем, что, с целью повышения производительности, стрела вьтолнена в виде двух поворотных стоек, связанных между собой траверсой, на которой жестко закреплено зубчатое колесо зубчато-реечной передачи ее поворота, при этом рейка последней закреплена на штоке силового цилиндра привода поворота траверсы, а корпус этого силового цилиндра закреплен на одной из стоек, кроме того, траверса выполнена в виде
313790554
параллельно расположенных штоков си- закреплен двухзахватный механизм за- ловых цилиндров, на корпусах которых жима.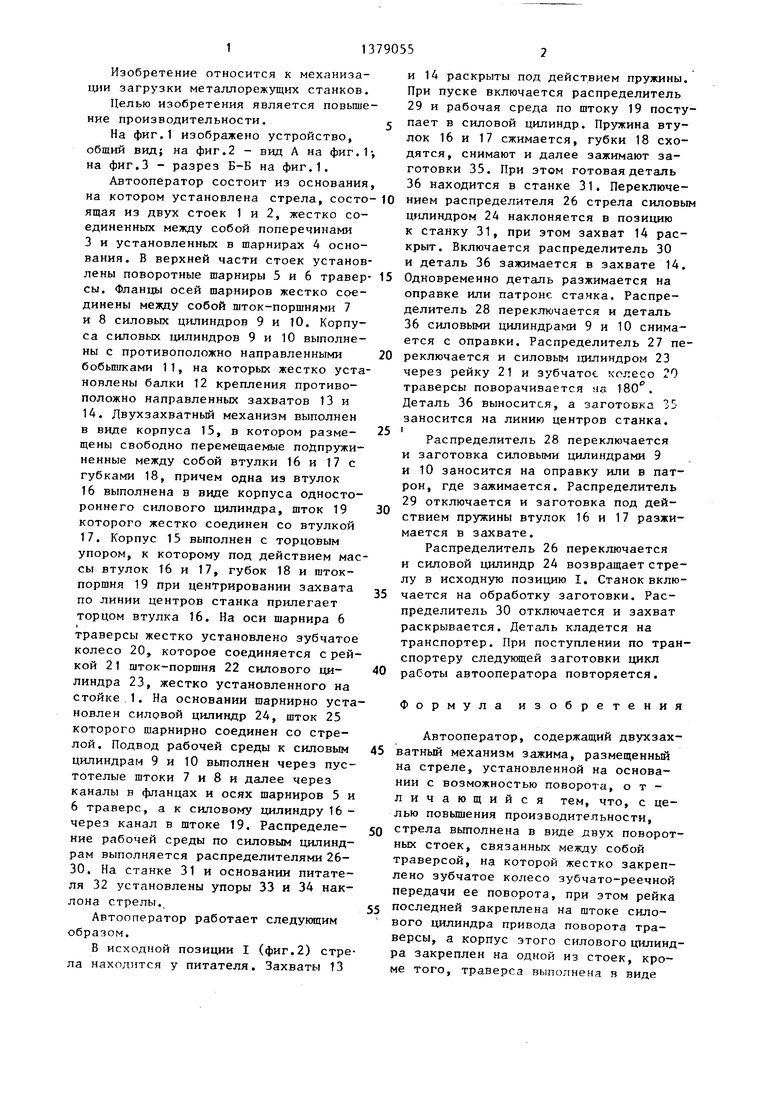
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват автооператора | 1981 |
|
SU1038183A1 |
| АВТООПЕРАТОР МЕТАЛЛОРЕЖУЩИХ СТАНКОВ | 2005 |
|
RU2296039C2 |
| Автоматическая линия для обработки деталей типа валов | 1983 |
|
SU1175672A1 |
| ДВУХЗАХВАТНЫЙ АВТООПЕРАТОР | 1969 |
|
SU246293A1 |
| Устройство для автоматической смены инструмента | 1982 |
|
SU1074700A1 |
| Устройство для автоматической смены инструмента | 1989 |
|
SU1698035A1 |
| Многопозиционный автооператор | 1988 |
|
SU1683969A1 |
| Автооператор для автоматической смены инструмента | 1984 |
|
SU1255371A1 |
| Автооператор | 1982 |
|
SU1057237A1 |
| Станок для деформирующего протягивания | 1985 |
|
SU1346410A1 |
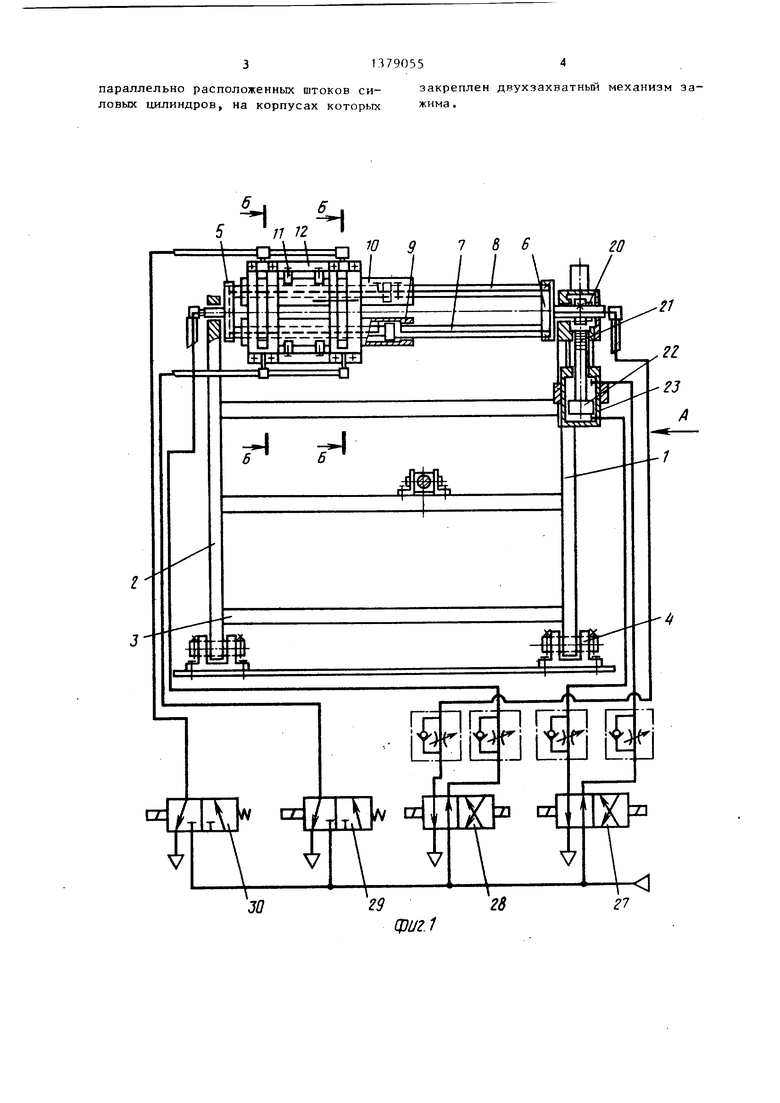
Изобретение относится к автоматизации технологических процессов в машиностроении и предназначается для разгрузки и загрузки металлорежущих станков. Целью изобретения является повышение производительности. В исходной позиции I стрела находится у питателя. Захваты 13 и 14 раскрыты. По команде захват 13 зажимает заго- товку 35. Стрела наклоняется к станку 31 с раскрытым захватом 14. Деталь 36 зажимается захватом 14. Деталь 36 снимается со станка перемещением двух- захватного механизма вдоль траверсы. Траверса поворачивается на 180 , заготовка 35 подается в станок. 3 ил.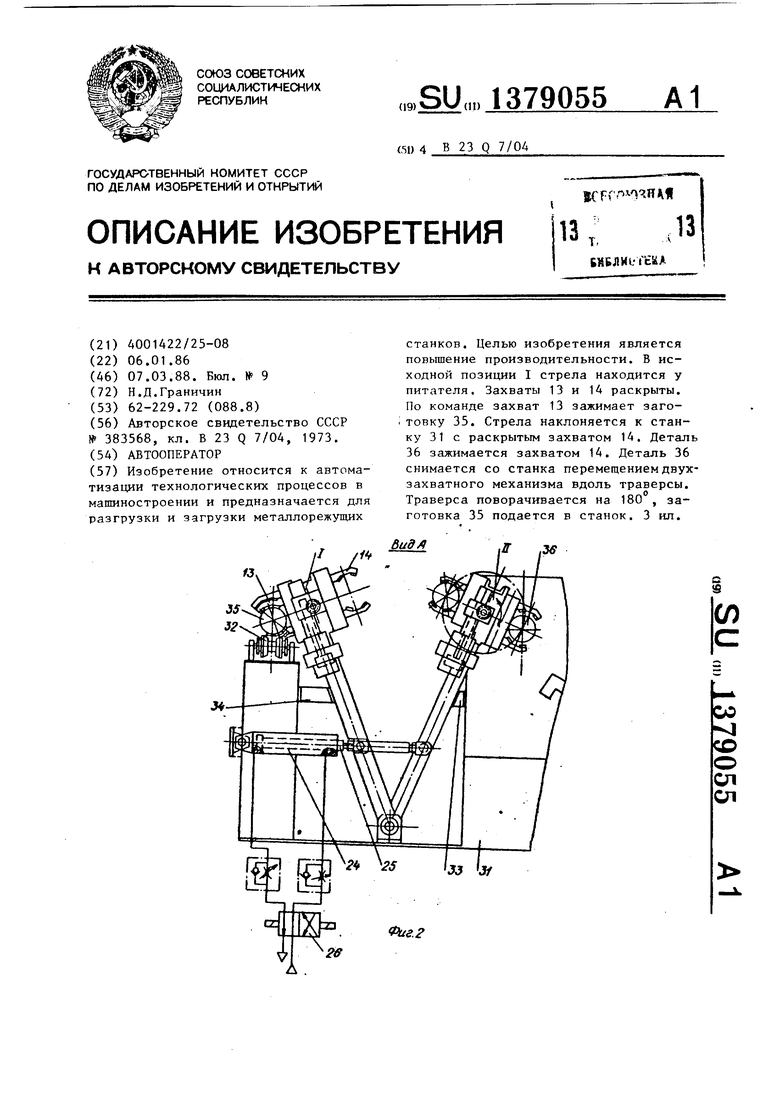
SH5
5 /7 72
JА
А/
J/7
ю д 7 в 6
го
GfПГг 1 Гг П Пг 1
Ы d
33 CZ
X
зп
V
V
f
21
6-6
сриг.з
| АВТООПЕРАТОР | 0 |
|
SU383568A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
