Изобретение относится к машиностроению и может быть использовано для ориентированной подачи в рабочие зоны технологических машин деталей с зыемкой на одном из торцев, например роликов подшипников качения.
Цель изобретения - повышение надежности ориентирования и разбраковки деталей типа роликов за счет оебспечения возможности их разделения на два ориентированных потока с оппозитным расположением торцев с выемкой посредством их одновременной выборки схваюм с двух ориентирующих позиций подающего лотка.
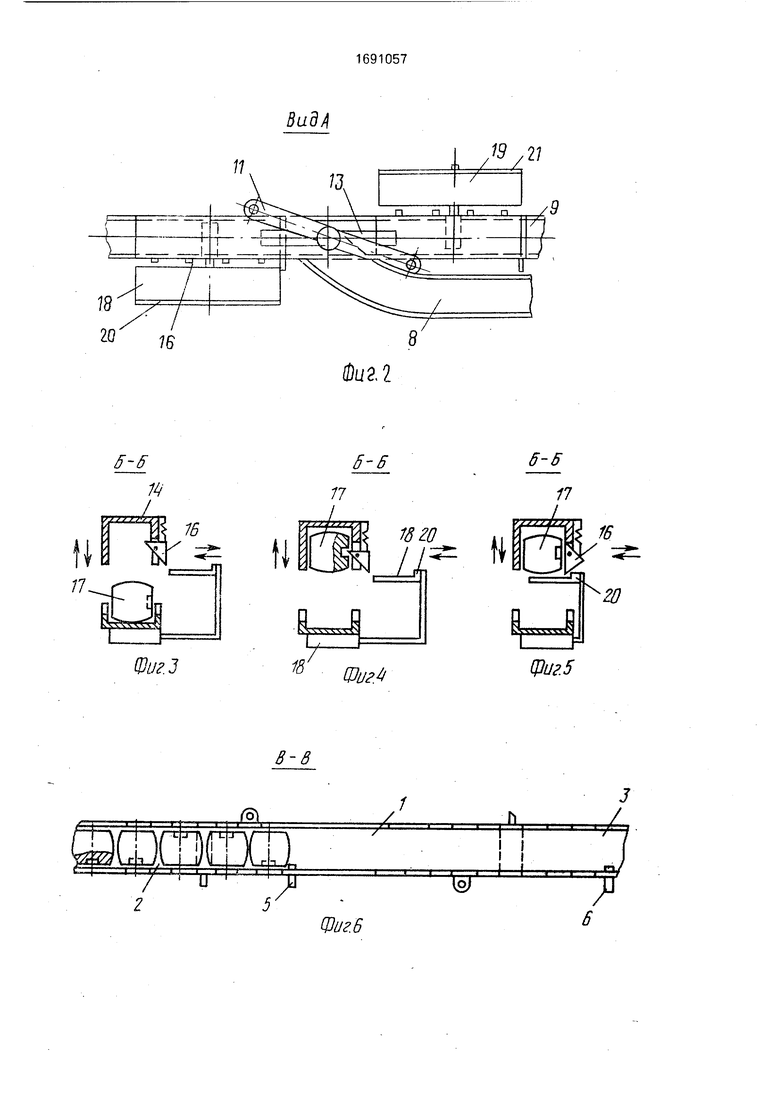
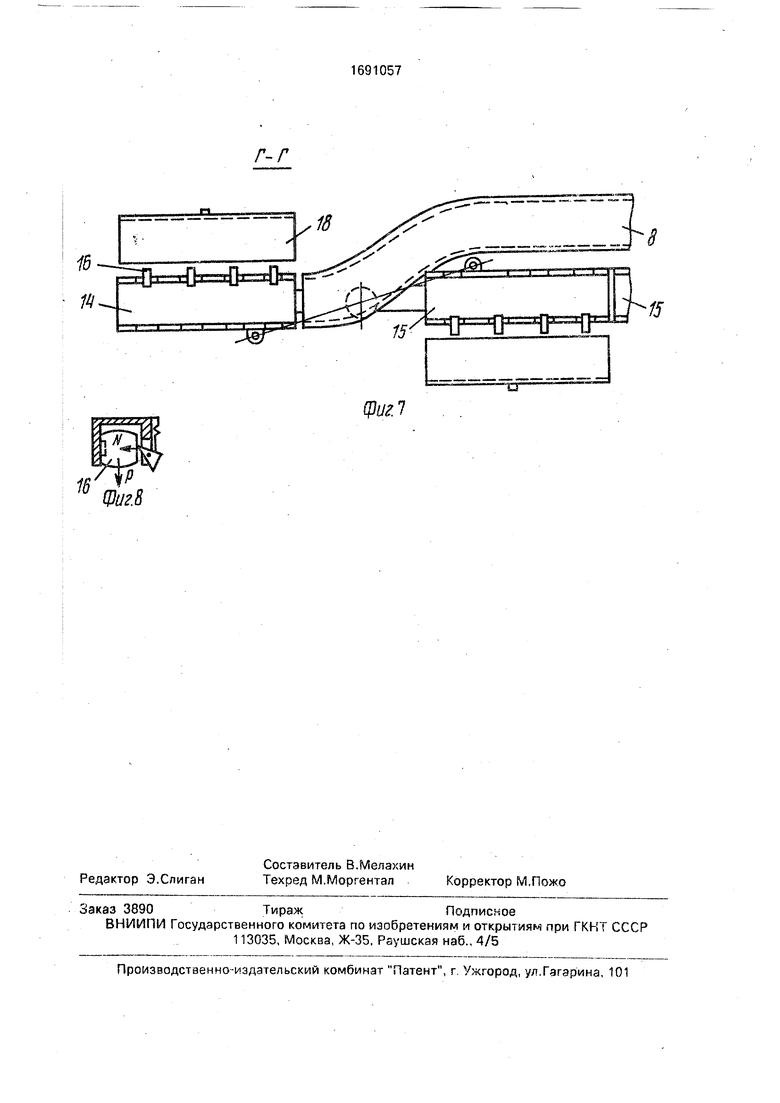
На фиг.1 схематично изображено устройство для осуществления способа ориентирования деталей с выемкой на одном из торцев посредством схвата с подпружиненными захватными элементами, общий вид; на фиг.2 - вид А на фиг.1; на фиг.З - сечение Б-Б на фиг.1; на фиг.4 - сечение Б-Б на фиг.1, в момент захвата детали; на фиг.5 - сечение Б-Б на фиг.1, в момент выдачи детали из схвата на заслонку; на фиг.6 - сечение В-В на фиг.1; на фиг.7-сечение Г-Гна фиг.1; на фиг.8 - воздействие схвата на неправильно ориентированную деталь,
Устройство для осуществления способа ориентирования деталей с выемкой на одном из торцев содержит наклонный подающий лоток 1 с позицией ориентирования, выполненной в виде двух последовательно расположенных основного 2 и дополнит ель- ного 3 ориентирующих участков с гребенчатыми боковыми стенками 4, два отсекателя 5 и 6, смонтированных на концах ориентирующих участков 2 и 3 подающего лотка 1:
групповой схват 7, установленный на позиции ориентирования подающего лотка 1 с возможностью возвратно-поступательных перемещений перпендикулярно к нему; основной 8 и дополнительный 9 отводящие лотки. На подающем лотке 1 закреплены также перпендикулярно к нему две колонки 10, соединенные траверсой 1.1, на которой закрегпен силовой цилиндр VI. На колонках
10 установлена с возможностью возвратно- поступательного перемещения вдоль их осей подвеска 13 группового схвата 7, связанная со штоком силового цилиндра 12 Групповой схват 7 выполнен в виде двух
П-образных держателей 14 и 5 с гребенчатыми боковыми стенками, которые закреплены на подвеске 13 соответственно над ориентиоующими участками 2 и 3 подающего лотка 1 Для обеспечения возможности
сближения группового схвата 7 с подающим лотком 1 выступы гребенчатых боковых сге- нок его П-образных держателей 14 и 15 рас- положены соответственно впадинам гребенчатых боковых стенок 4 ориентиру ющих участков 2 и 3 подающего лотка i. На выступах одной из боковых стенок каждого из П-образных держателей 14 и 15 смонтированы подпружиненные захватные элементы, выполненные в виде собачек 16. При
этом собачки П-образного держателя 14 расположены оппозитно собачкам П-образного держателя 15, т.е. смонтированы на выступах оппозитно расположенных стенок П-образных держателе1/. 14 и 15. Собачки 16
смонтированы на выступах стенок П-образных держателей с шагом, равным диаметру ориентируемого ролика 17. Подающий лоток 1 снабжен также двумя заслонками 18 и 19, имеющими борта соответственно 20 и 21. Заслонки 18 и 19 установлены соо:вет- ственно над ориентирующими участками 2 и 3 подающего лотка 1 с возможностью возвратно-поступательного перемещения в плоскости, параллельной дну подающего лотка 1, перпендикулярно его продольной оси от соответствующих пневмоприводов 22 и 23, и одн временно, также и с возможностью взаимодействия своими бортами 20 и 21 с собачками соответствующих П-образ- ных держатели 14 и 15 группового схвата 7. Над подающим лотком 1 на уровне заслонок 18 и 19 закреплены, соответственно, основной отводящий лоток 8 и дополнительный отводящий лоток 9. При этом приемная часть основного отводящего лотка 8 расположена у нижней кромки заслонки 18, а приемная часть дополнительного отводящего лотка 9 - у нижней кромки заслонки 19.
Способ ориентирования деталей с выемкой на одном из торцев посредством устройства со схватом с подпружиненными захватными элементами осуществляют следующим образом.
В исходном пояожении.группсвой схват 7 находится в крайнем верхнем положении, причем несущая поверхность его П-образ- ных держателей 14 и 15, параллельная дну подающего лоткэ 1, расположена от дна лотка на расстоянии, превышающем два диаметра ориентируемого ролика 17. В этот момент заслонки 18 и 19 введены в пространство в промежуток между П-образны- ми держателями группового схвата 7 и подающим лотком 1. Отсекатели 5 и 6 пере1 крывают выход с, ориентирующих участков 2 и 3 подающего лотка 1.
Группу роликов подяют по дну подающего лотка 1 на его основной ориентирующий участок 2, где они удерживаются и позиционируются отсекателем 5. Нижняя плоскость заслонки 18 обеспечивает при этом их однорядное расположение. По сигналу датчика (не показан), фиксирующего наличие роликов на основном ориентирующем участке 2, пневмоприводы 22 и 23 выводят заслонки 18 и 19 из промежутка между подающим лотком 1 и групповым схватом 7 (см.фиг.3). По сигналу датчика (не показан), фиксирующего отвод заслонок 18 и 19, силовой цилиндр 12 опускает групповой схват 7 вниз к подающему лотку 1. При этом, так как выступы гребенчатых боковых стенок П-образных держателей 14 и 15 группового схвата 7 расположены соответственно впадинам гребенчатых стенок 4 подающего лотка 1 на его ориентирующих участках, то схват беспрепятственно подводится к ориентируемым роликам 17. По мер движения схвата вниз, ролики 17, воздействуя на его собачки 16, обжимают их, и каж- дач собачка проскальзывает по торцу 5 соответствующего ролика. В крайнем нижнем положении схвата, если ролик обращен к собачке торцем с выемкой, то последняя под действием своей пружины входит в выемку на торце ролика, а если ролик обращен к
0 собачке торцем без выемки, то она поджимается пружиной к поверхности его торца Причем в последнем случае собачка поджимается к поверхности торца ролика с таким усилием, при котором суммарная сила тре5 ния, действующая между торцами ролика и рабочими поверхностями схвата (поверхность выступа гребенчатой стенки П-образ- ного держателя и поверхность собачки), меньше собственного веса ролика (фиг.8).
0 Величина требуемого усилия поджима обеспечивается подбором соответствующей пружины собачки 16. Затем, по команде датчика силовой цилиндр 12 поднимает схват 7 в крайнее верхнее положение (фиг.4). При
5 этом в схвате остаются только те ролики, в выемки торцев которых вошли собачки 16, а ролики, которые были обращены торцем с выемкой в сторону, противоположную собачкам 16, под действием собственного ве0 са выскальзывают из схвата и остаются на основном ориентирующем участке 2 подающего лотка 1. Далее по команде датчика пневмоприводы 22 и 23 вводят заслонки 18 и 19 в промежуток между схватом 7 и пода5 ющим лотком 1. При этом заслонки 18 и 19, взаимодействуя своими бортами 20 и 21 с .собачками 15 схвата 7, отжимают их и выводят из выемок торцев роликов 17 (фиг.5). Освобожденные ролики скатываются по за0 слонке 18 в основной отводящий лоток 8. От сброса с заслонки 18 они удерживаются боковыми стенками П-образного держателя 14 схвата 7. По команде датчика отсекатель 5 пропускает ролики, невыбранные с основ5 ,ного ориентирующего участка 2 схватом 7, на дополнительный ориентирующий участок 3, где они удерживаются и позиционируются отсекателем 6. Затем отсекатель 5 вновь перекрывает канал подающего лотка
0 1 ь на его основной ориентирующий участок 2 подают следующую группу роликов. Далее цикл повторяют.
Однако, при выполнении второго и по - следующих циклов работы устройства, ори5 ентирование роликов осуществляется одновременно на обоих ориентирующих участках 2 и 3 подающего лотка 1. При этом ролики, находящиеся на дополнительном ориентирующем участке 3, захватываются схватом 7 посредством собачек 16, смонтированных на его П-образном держателе 15 (т.е. расположенных оппозитно собачкам, смонтированным на П-образном держателе 14), и подаются им на верхнюю плоскость заслонки 19, откуда они скатываются на до- полнительный отводящий лоток 9, В конце второго и последующих циклов работы устройства на дополнительном ориентирующем участке 3 подающего лотка 1 остаются только бракованные ролики (без выемки на торце, меньших габаритных размеров и т.п.), которые после отвода отсекателя 6 сбрасываются с подающего лотка 1 в тару. После возвращения отсекателя 6 в исходное положение последующие циклы ориентире- вания роликов выполняются аналогично вышеизложенному.
Таким образом, применение схвата с оппозитно расположенными группами контролирующих захватных элементов (соба- чек 16) позволяет надежно ориентировать детали с выемкой на одном из торцев путем их разделения на два потока ориентированных деталей с оппозитным расположением торцев с выемкой. Это обеспечивается тем, что, несмотря на то, что ориентируемые детали выбираются с подающего лотка охватом одновременно с обоих позиций, некоторые из ориентируемых деталей последовательно подаются на обе позиции ориентирования.
Формула изобретения 1. Способ ориентирования деталей с выемкой на одном из торцев, заключающийся в подаче деталей по лотку на позицию ори- ентирования и их последующем разделении на два потока ориентированных деталей с оппозитным расположением торцев с выемкой посредством схвата, осуществляющего выборку с позиции ориентирования дета- лей, направленных торцем с выемкой к его контролирующим захватным элементам, и их перенос на отводящий лоток, о т л и ч а к щ и и с я тем, что, с целью повышения надежности способа при ориентировании и разбраковке деталей типа роликов, одновременно с подачей на основную позицию детали подают на расположенную последовательно с ней дополнительную позицию ориентирования, а выборку деталей осуще- ствляют одновременно с обоих позиций
ориентирования посредством схвата с оппозитно расположенными группами контролирующих захватных элементов, причем н дополнительную позицию ориентирования подают детали, невыбранные схватом с основной позиции ориентирования, при этом детали, выбранные с дополнительной позиции ориентирования, переносят схватом на дополнительный отводящий лоток.
2.Устройство для ориентирования деталей с выемкой на одном из торцев, содержащее подающий лоток с двумя отсекателями, схват, установленный на позиции ориентирования подающего лотка с возможностью возвратно-поступательных перемещений перпендикулярно последнему, и отводящий лоток, отличающееся тем, что, с целью повышения надежности ориентирования и разбраковки деталей типа роликов, позиция ориентирования подающего лотка выполнена в виде двух последовательно расположенных участков с гребенчатыми боковыми стенками, а схват - в виде двух размещенных под вышеуказанными участками П-об- разных держателей с гребенчатыми стенками, выступы которых расположены соответственно впадинам гребенчатых боковых стенок подающего лотка, причем на выступах оппозитно расположенных стенок П-обрззных держателей смонтированы подпружиненные захватные элементы, при этом устройство снабжено дополнительным отводящим лотком и двумя заслонками, ус- танов, :нными над указанными участками подающего лотка с гребенчатыми боковыми стенками.
3.Устройство по п.2, отличающее- с я тем, что подпружиненные захватные элементы выполнены в виде собачек, а отводящие лотки закреплены над подающим лотком на уровне заслонок, причем заслонки установлены с возможностью возвратно- поступательного перемещения в плоскости, параллельной дну падающего лотка, перпендикулярно его продольной оси и с возможностью взаимодействия с собачками, смонтированными на соответствующем П- образном держателе схвата, при этом отсе- катели установлены на концах участков подающего лотка с гребенчатыми стенками.
Вид А
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ориентирования деталей | 1976 |
|
SU654389A1 |
| Устройство для вторичного ориентирования деталей | 1987 |
|
SU1444129A1 |
| Устройство для ориентирования деталей с выемкой | 1985 |
|
SU1284780A1 |
| Ориентирующее устройство | 1982 |
|
SU1052365A1 |
| Устройство для ориентирования деталей | 1972 |
|
SU438518A1 |
| Пневматическое устройство для ориентации деталей | 1990 |
|
SU1759602A1 |
| Промышленный робот | 1986 |
|
SU1348166A1 |
| Устройство для групповой обработки деталей | 1990 |
|
SU1815154A1 |
| Ориентирующее устройство | 1983 |
|
SU1174226A1 |
| Устройство для ориентирования деталей | 1986 |
|
SU1366352A1 |
Изобретение относится к машиностроению и может быть использовано для ориен- тированной подачи в рабочие зоны технологических машин деталей типа роликов. Цель изобретения - ориентирование роликов с выемкой на одном из торцев за счет обеспечения возможности захвата роликов только в одном положении. Группу роликов 13 подаютна наклонный подающий лоток I, имеющий два последовательно расположенных участка с гребенчатыми боковыми стенками 4. На участке 2 ролики задерживаются верхним отсекателем 5, Привод 8 опускает групповой схват, выполненный в виде двух размещенных над вышеуказанными участками лотка 1 П-образных держателей 10 и 11 с гребенчатыми боковыми стенками, на выступах оппозитно расположенных стенок которых смонтированы подпружиненные собачки 12. В крайнем нижнем положении схвата, если ролик обра(Л с
11
Фиг 1
5-5
м
/
17
is
п
I
Фиг.З
18
Т
(Риг4
Фиг.6
/
19 /27
8
5-6
6-5
1 Л
К
16
фиг.5
h
3
/
W
7
Фи.8
15
bsgsrsagxs g
UT/J
№
| Иванов А.А | |||
| Проектирование систем автоматического манипулирования миниатюрными изделиями; М/ Машиностроение, 1981, с | |||
| Ударно-вращательная врубовая машина | 1922 |
|
SU126A1 |
