Изобретение относится к строительно-дорожному машиностроению, а именно к гидроприводам бульдозеров.
Цель изобретения - повышение эффективности системы управления.
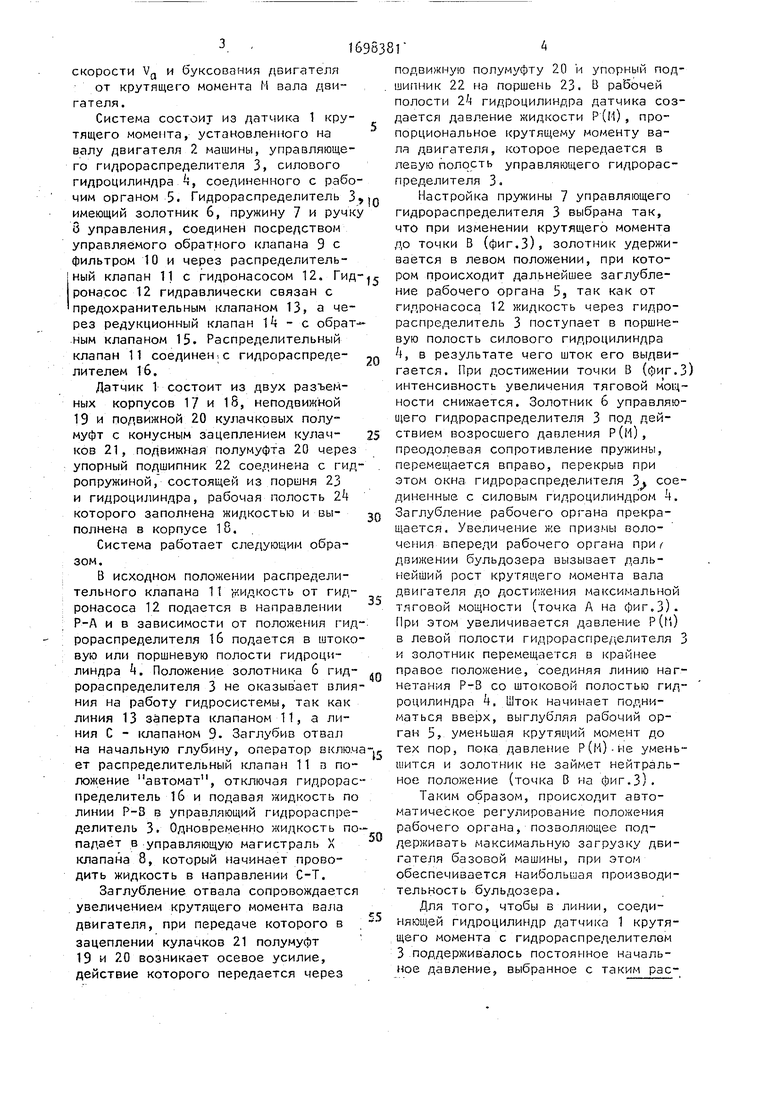
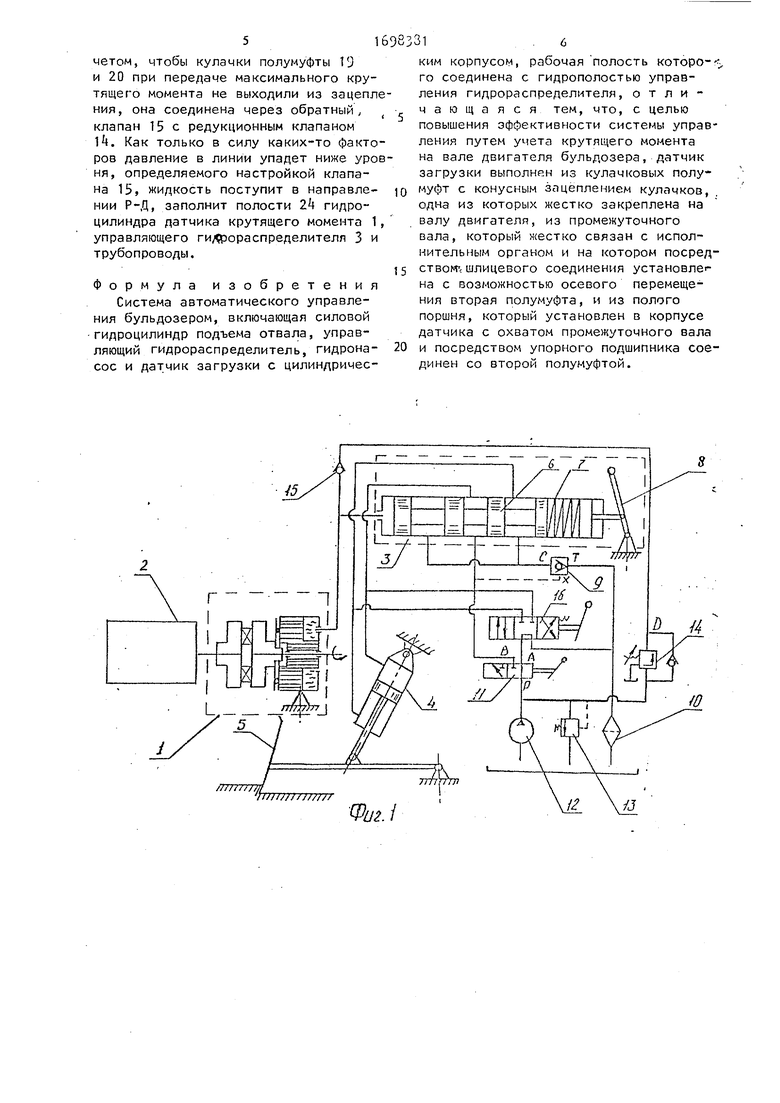
На фиг.1 изображена функциональная схема автоматического управления бульдозером; на фиг.2 - датчик крутя- |Щего момента; на фиг.З - график зави- (симости тяговой мощности NT, рабочей
сжорости Va и буксования двигателя
от крутящего момента И вала двигателя.
Система состоит из датчика 1 крутящего момента, установленного на валу двигателя 2 машины, управляющего гидрораспределителя Зя силового гидроцилиндра k, соединенного с рабочим органом 5. Гидрораспределитель имеющий золотник 6, пружину 7 и ручку 3 управления, соединен посредством управляемого обратного клапана 9 с фильтром 10 и через распределительный клапан 11 с гидронасосом 12. Гид- ронасос 12 гидравлически связан с предохранительным клапаном 13, а через редукционный клапан 1А - с обратным клапаном 15. Распределительный клапан 11 соединен с гидрораспределителем 16.
Датчик 1 состоит из двух разъемных корпусов 17 и 18, неподвижной 19 и подвижной 20 кулачковых полумуфт с конусным зацеплением кулачков 21, подвижная полумуфта 20 через упорный подшипник 22 соединена с гидропружиной, состоящей из поршня 23 и гидроцилиндра, рабочая полость которого заполнена жидкостью и выполнена в корпусе 18.
Система работает следующим образом.
8 исходном положении распределительного клапана 11 жидкость от гидронасоса 12 подается в направлении Р-А и в зависимости от положения гидрораспределителя 16 подается в штоко- вую или поршневую полости гидроцилиндра k. Положение золотника б гид- ,п рораспределителя 3 не оказывает влияния на работу гидросистемы, так как линия 13 заперта клапаном 11, а линия С - клапаном 9. Заглубив отвал
20
25
30
35
подвижную полумуфту 20 и упорный подшипник 22 на поршень 23. В рабочей полости 2k гидроцилиндра датчика создается давление жидкости Р(М), пропорциональное крутящему моменту вала двигателя, которое передается в левую полость управляющего гидрораспределителя 3.
Настройка пружины 7 управляющего гидрораспределителя 3 выбрана так, что при изменении крутящего момента до точки В (фиг.З), золотник удерживается в левом положении, при котором происходит дальнейшее заглубление рабочего органа 5, так как от гидронасоса 12 жидкость через гидрораспределитель 3 поступает в поршневую полость силового гидроцилиндра 1, в результате чего шток его выдвигается. При достижении точки В (фиг.З интенсивность увеличения тяговой мощности снижается. Золотник 6 управляющего гидрораспределителя 3 под действием возросшего давления Р(М), преодолевая сопротивление пружины, перемещается вправо, перекрыв при этом окна гидрораспределителя 3 соединенные с силовым гидроцилиндром 4. Заглубление рабочего органа прекращается. Увеличение же призмы волочения впереди рабочего органа при движении бульдозера вызывает дальнейший рост крутящего момента вала двигателя до достижения максимальной тяговой мощности (точка А на фиг.З). При этом увеличивается давление Р(М) в левой полости гидрораспределителя 3 и золотник перемещается в крайнее правое положение, соединяя линию нагнетания Р-В со штоковой полостью гид- роцилиндра ч. Шток начинает подниматься вверх, выглубляя рабочий орган 5, уменьшая крутящий момент до
на начальную глубину, оператор в ключ а-,г тех пор, пока давление Р(М)-ие уменьет распределительный клапан 11 в положение автомат, отключая гидрораспределитель 1б и подавая жидкость по линии Р-3 в управляющий гидрораспределитель 3. Одновременно жидкость попадает в управляющую магистраль X клапана 8, который начинает проводить жидкость в направлении С-Т.
Заглубление отвала сопровождается увеличением крутящего момента вала двигателя, при передаче которого в зацеплении кулачков 21 полумуфт 19 и 20 возникает осевое усилие, действие которого передается через
50
55
шится и золотник не займет нейтральное положение (точка В на фиг.З).
Таким образом, происходит автоматическое регулирование положения рабочего органа, позволяющее поддерживать максимальную загрузку двигателя базовой машины, при этом обеспечивается наибольшая производительность бульдозера.
Для того, чтобы в линии, соединяющей гидроцилиндр датчика 1 крутящего момента с гидрораспределителом 3 поддерживалось постоянное начальное давление, выбранное с таким рас|п,п 20
25
30
35
9838Г4
подвижную полумуфту 20 и упорный подшипник 22 на поршень 23. В рабочей полости 2k гидроцилиндра датчика создается давление жидкости Р(М), пропорциональное крутящему моменту вала двигателя, которое передается в левую полость управляющего гидрораспределителя 3.
Настройка пружины 7 управляющего гидрораспределителя 3 выбрана так, что при изменении крутящего момента до точки В (фиг.З), золотник удерживается в левом положении, при котором происходит дальнейшее заглубление рабочего органа 5, так как от гидронасоса 12 жидкость через гидрораспределитель 3 поступает в поршневую полость силового гидроцилиндра 1, в результате чего шток его выдвигается. При достижении точки В (фиг.З) интенсивность увеличения тяговой мощности снижается. Золотник 6 управляющего гидрораспределителя 3 под действием возросшего давления Р(М), преодолевая сопротивление пружины, перемещается вправо, перекрыв при этом окна гидрораспределителя 3 соединенные с силовым гидроцилиндром 4. Заглубление рабочего органа прекращается. Увеличение же призмы волочения впереди рабочего органа при движении бульдозера вызывает дальнейший рост крутящего момента вала двигателя до достижения максимальной тяговой мощности (точка А на фиг.З). При этом увеличивается давление Р(М) в левой полости гидрораспределителя 3 и золотник перемещается в крайнее правое положение, соединяя линию нагнетания Р-В со штоковой полостью гид- роцилиндра ч. Шток начинает подниматься вверх, выглубляя рабочий орган 5, уменьшая крутящий момент до
0
5
шится и золотник не займет нейтральное положение (точка В на фиг.З).
Таким образом, происходит автоматическое регулирование положения рабочего органа, позволяющее поддерживать максимальную загрузку двигателя базовой машины, при этом обеспечивается наибольшая производительность бульдозера.
Для того, чтобы в линии, соединяющей гидроцилиндр датчика 1 крутящего момента с гидрораспределителом 3 поддерживалось постоянное начальное давление, выбранное с таким рас516983
четом, чтобы кулачки полумуфты 1(J и 20 при передаче максимального крутящего момента не выходили из зацепления, она соединена через обратный, ( , клапан 15 с редукционным клапаном 1. Как только в силу каких-то факторов давление в линии упадет ниже уровня, определяемого настройкой клапана 15 жидкость поступит в направле- Q нии Р-Д, заполнит полости 2k гидроцилиндра датчика крутящего момента 1, управляющего ги/фораспределителя 3 и трубопроводы.
Формула изобретения
Система автоматического управления бульдозером, включающая силовой гидроцилиндр подъема отвала, управляющий гидрораспределитель, гидронасос и датчик загрузки с цилиндричес
Q
5
0
31б
ким корпусом, рабочая полость которо-- го соединена с гидрополостью управления гидрораспределителя, отличающаяся тем, что, с целью повышения эффективности системы управления путем учета крутящего момента на вале двигателя бульдозера, датчик загрузки выполнен из кулачковых полумуфт с конусным зацеплением кулачков, одна из которых жестко закреплена на валу двигателя, из промежуточного вала, который жестко связан с исполнительным органом и на котором посредством шлицевого соединения установлег на с возможностью осевого перемещения вторая полумуфта, и из полого поршня, который установлен в корпусе датчика с охватом промежуточного вала и посредством упорного подшипника соединен со второй полумуфтой.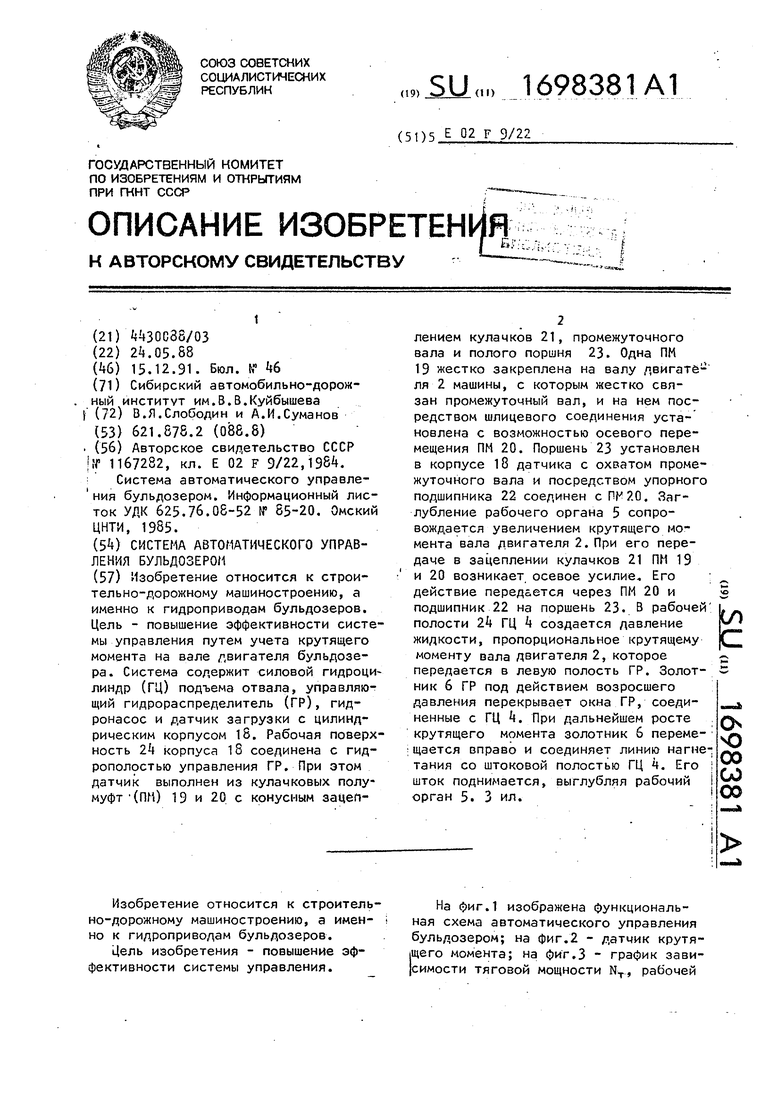
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидросистема управления рабочим процессом бульдозера | 1983 |
|
SU1129302A1 |
| Бульдозер | 1985 |
|
SU1330274A1 |
| Стенд для испытания бульдозера | 1983 |
|
SU1215013A1 |
| Одноковшовая погрузочная машина | 1988 |
|
SU1566047A1 |
| Гидросистема управления рабочим органом бульдозера | 1985 |
|
SU1240840A1 |
| Гидропривод бульдозера | 1984 |
|
SU1234540A1 |
| Гидропривод бульдозера | 1990 |
|
SU1770616A1 |
| Гидропривод рабочего оборудования строительной машины | 2021 |
|
RU2775631C1 |
| ГИДРОМЕХАНИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ РАБОЧЕГО ОБОРУДОВАНИЯ БУЛЬДОЗЕРА | 1994 |
|
RU2078177C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ГИДРОЦИЛИНДРОВ НАВЕСНОЙ СИСТЕМЫ НА МОБИЛЬНОЙ МАШИНЕ | 2010 |
|
RU2464454C2 |
Изобретение относится к строительно-дорожному машиностроению, а именно к гидроприводам бульдозеров. Цель - повышение эффективности системы управления путем учета крутящего момента на вале двигателя бульдозера. Система содержит силовой гидроцилиндр (ГЦ) подъема отвала, управляющий гидрораспределитель (ГР), гидронасос и датчик загрузки с цилиндрическим корпусом 18. Рабочая поверхность 24 корпуса 18 соединена с гидрополостью управления ГР. При этом датчик выполнен из кулачковых полумуфт (ПН) 19 и 20 с конусным зацеплением кулачков 21, промежуточного вала и полого поршня 23. Одна ПМ 19 жестко закреплена на валу двигателя 2 машины, с которым жестко связан промежуточный вал, и на нем посредством шлицевого соединения установлена с возможностью осевого перемещения ПМ 20. Поршень 23 установлен в корпусе 18 датчика с охватом промежуточного вала и посредством упорного подшипника 22 соединен с ПК 20. Заглубление рабочего органа 5 сопровождается увеличением крутящего момента вала двигателя 2. При его передаче в зацеплении кулачков 21 ПИ 19 и 20 возникает осевое усилие. Его действие передается через ПМ 20 и подшипник 22 на поршень 23. В рабочей полости 24 ГЦ 4 создается давление жидкости, пропорциональное крутящему моменту вала двигателя 2, которое передается в левую полость ГР. Золотник 6 ГР под действием возросшего давления перекрывает окна ГР, соединенные с ГЦ 4. При дальнейшем росте крутящего момента золотник 6 перемещается вправо и соединяет линию нагнетания со штоковой полостью ГЦ 4. Его шток поднимается, выглубляя рабочий орган 5. 3 ил. 10 с о о 00 СА) 00
Д/г./
19 21
. ±Х
Фиг.2.
20 2i
24
м
| Гидропривод бульдозера | 1984 |
|
SU1167282A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Система автоматического управления бульдозером | |||
| ТАНК-ПАРОВОЗ | 1923 |
|
SU625A1 |
| Омский ЦНТИ, 1985. | |||
