Изобретение относится к вспомогательному оборудованию обработки металлов давлением, а именно к конструкциям манипуляторов, используемых при автоматизации процессов холодной листовой штамповки длинномерных заготовок.
Цель изобретения - повышение точности позиционирования манипулятора за счет обеспечения выборки зазоров в шарнирах.
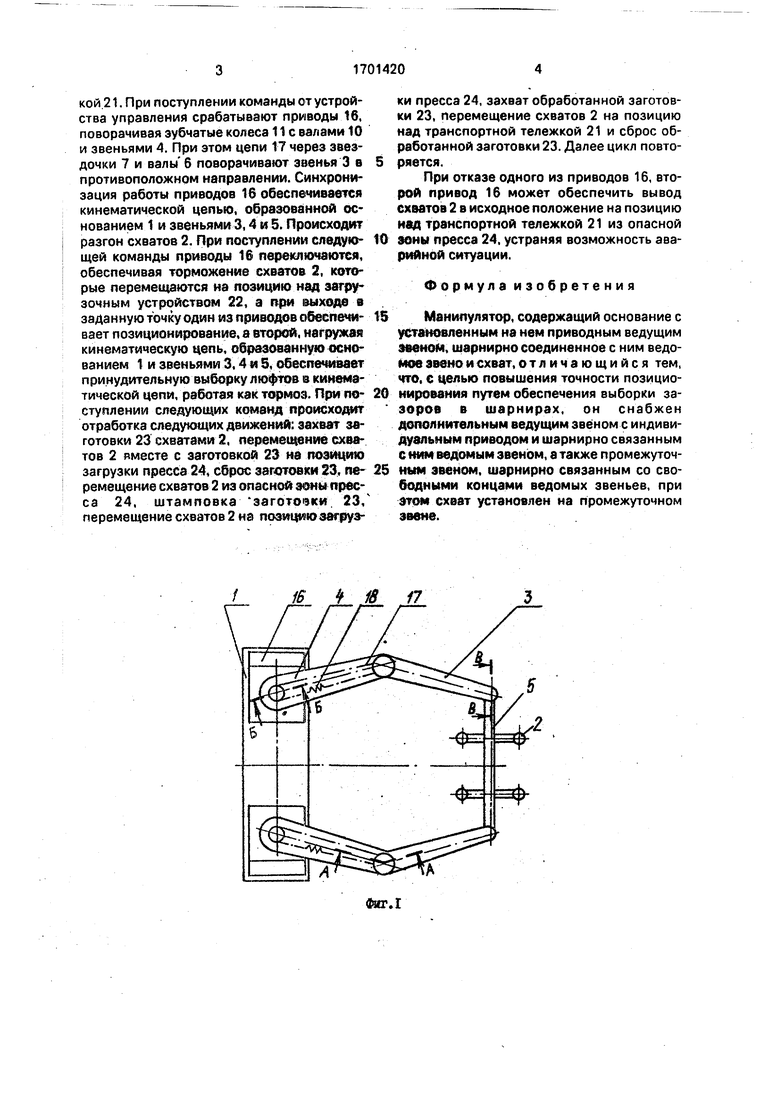
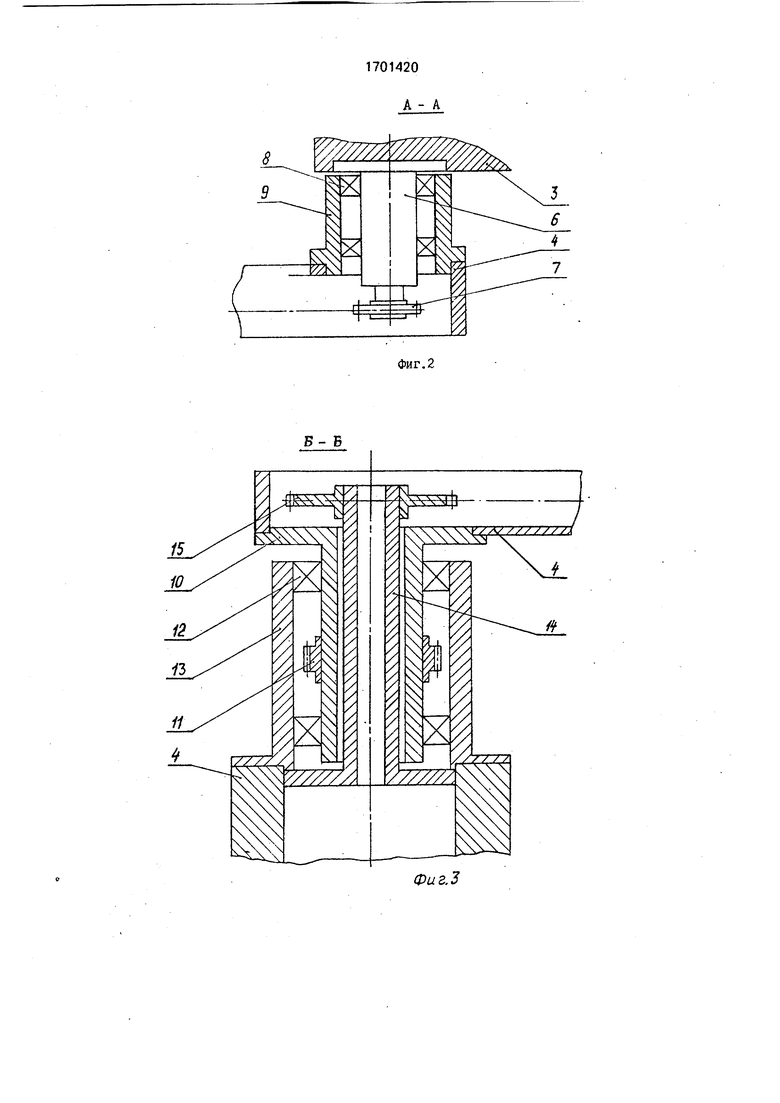
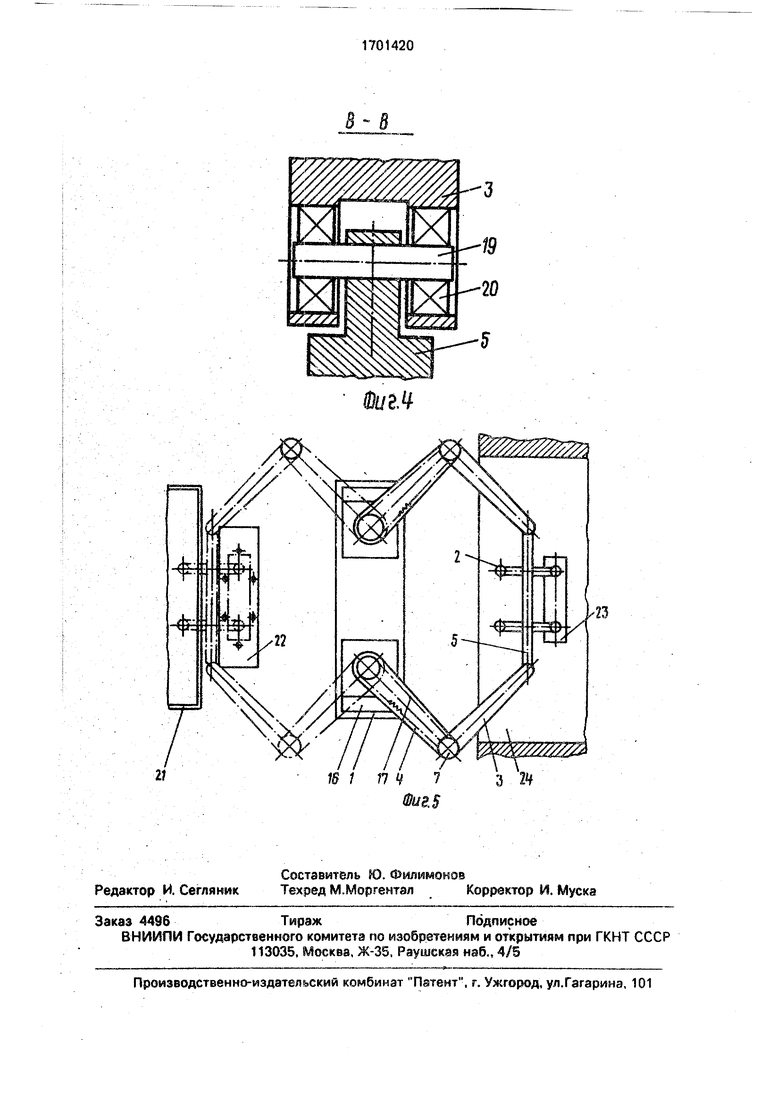
На фиг.1 изображен манипулятор, общий вид; на фиг.2 - разрез А-А на фиг.1; на фиг.З - разрез Б-Б на фиг.1; на фиг.4 - разрез В-В на фиг.1; на фиг.5 - схема роботизированного техноло, ического комплекса с использованием предлагаемого манипулятора.
Манипулятор содержит основание 1, механизм прямолинейного перемещения схватов 2, выполненный в виде двух одинаковых пар звеньев, каждая из которых образована ведомым 3 и ведущим 4 звеньями.
Ведомые звенья 3 замкнуты через промежуточное звено 5, на котором расположены схваты 2. Звенья 3 и 4 шарнирно соединены между собой при помощи вала 6 с закрепленной на нем звездочкой 7 и двух подшипников 8, установленных в корпусе 9. Звено 4 шарнирно соединено с основанием 1 при помощи вала 10 с закрепленным на нем зубчатым колесом 11, двух подшипников 12, установленных в корпусе 13. К корпусу 13 крепится вал 14 с установленной на нем звездочкой 15. Привод 16, установленный на корпусе 13, приводит во вращение вал 10. Кинематическая связь звеньев 3 и 4 осуществляется через цепь 17, замкнутую через пружину 18. Звено 3 шарнирно соединено с промежуточным звеном 5 при помощи вала 19 и двух подшипников 20.
Манипулятор работает следующим образом.
8 исходном положении схваты 2 находятся на позиции над транспортной тележ л
С
кой 21. При поступлении команды от устройства управления срабатывают приводы 16, поворачивая зубчатые колеса 11с валами 10 и звеньями 4. При этом цепи 17 через звездочки 7 и валы б поворачивают звенья 3 в противоположном направлении. Синхронизация работы приводов 16 обеспечивается кинематической цепью, образованной основанием 1 и звеньями 3,4 и 5. Происходит разгон схватов 2. При поступлении следую- щей команды приводы 16 переключаются, обеспечивая торможение схватов 2, которые перемещаются на позицию над загрузочным устройством 22, а при выходе в заданную точку один из приводов обеспечи- вает позиционирование, а второй, нагружая кинематическую цепь, образованную основанием 1 и звеньями 3,4 и 5, обеспечивает принудительную выборку люфтов в кинематической цепи, работая как тормоз. При по- с ту пленим следующих команд происходит отработка следующих движений: захват заготовки 23 схватами 2, перемещение схватов 2 вместе с заготовкой 23 на позицию загрузки пресса 24, сброс заготовки 23, пе- ремещение схватов 2 из опасной зоны прес- са 24, штамповка заготовки 23/ перемещение схватов 2 на позицию загрузки пресса 24, захват обработанной заготовки 23, перемещение схватов 2 на позицию над транспортной тележкой 21 и сброс обработанной заготовки 23. Далее цикл повторяется.
При отказе одного из приводов 16, второй привод 16 может обеспечить вывод схватов 2 в исходное положение на позицию над транспортной тележкой 21 из опасной зоны пресса 24, устраняя возможность аварийной ситуации.
Формула изобретения
Манипулятор, содержащий основание с установленным на нем приводным ведущим звеном, шарнирно соединенное с ним ведомое звено и схват, отличающийся тем, что, с целью повышения точности позиционирования путем обеспечения выборки зазоров в шарнирах, он снабжен дополнительным ведущим звеном с индивидуальным приводом и шарнирно связанным с ним ведомым эвеном, а также промежуточным эвеном, шарнирно связанным со свободными концами ведомых звеньев, при этом схват установлен на промежуточном звене.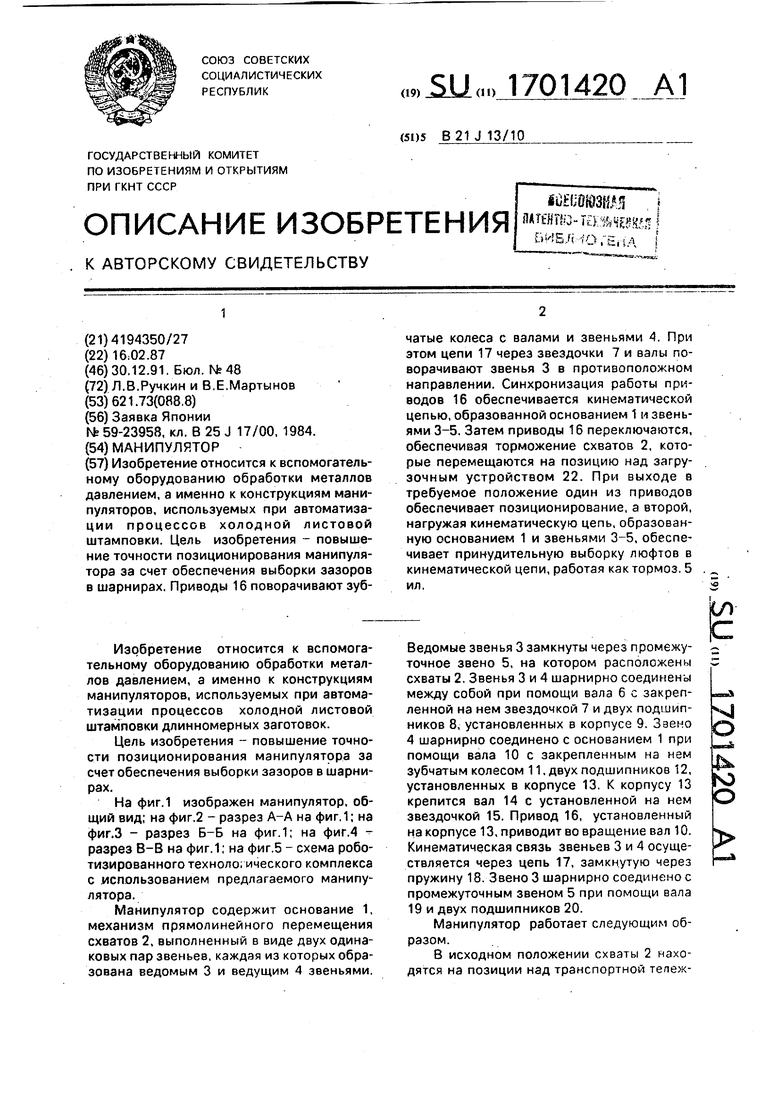
| название | год | авторы | номер документа |
|---|---|---|---|
| Гибкий производственный модуль для листовой штамповки | 1988 |
|
SU1667994A1 |
| Манипулятор | 1987 |
|
SU1414625A1 |
| Роботизированный комплекс горячей штамповки | 1988 |
|
SU1613235A1 |
| Захватная головка манипулятора | 1988 |
|
SU1572806A1 |
| Устройство для управления манипулятором | 1985 |
|
SU1262450A1 |
| Манипулятор | 1982 |
|
SU1073086A1 |
| Манипулятор | 1979 |
|
SU770780A1 |
| Автоматизированная линия для многопереходной штамповки | 1986 |
|
SU1344471A1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2001 |
|
RU2184030C1 |
| Манипулятор | 1984 |
|
SU1194673A1 |
Изобретение относится к вспомогательному оборудованию обработки металлов давлением, а именно к конструкциям манипуляторов, используемых при автоматизации процессов холодной листовой штамповки. Цель изобретения - повышение точности позиционирования манипулятора за счет обеспечения выборки зазоров в шарнирах. Приводы 16 поворачивают зубчатые колеса с валами и звеньями 4. При этом цепи 17 через звездочки 7 и валы поворачивают звенья 3 в противоположном направлении. Синхронизация работы приводов 16 обеспечивается кинематической цепью, образованной основанием 1 и звеньями 3-5. Затем приводы 16 переключаются, обеспечивая торможение схватов 2, которые перемещаются на позицию над загрузочным устройством 22. При выходе в требуемое положение один из приводов обеспечивает позиционирование, а второй, нагружая кинематическую цепь, образованную основанием 1 и звеньями 3-5, обеспечивает принудительную выборку люфтов в кинематической цепи, работая как тормоз. 5 ил.
1В } 1S 17
й I
cv
t-i %
%
S
/N /
У/////////////////////,
I
v 3
в
Lr
й/гҐ
IB 1 П Ч 1 fe.5
3
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
