(Л
4;:
05
ISD ел
7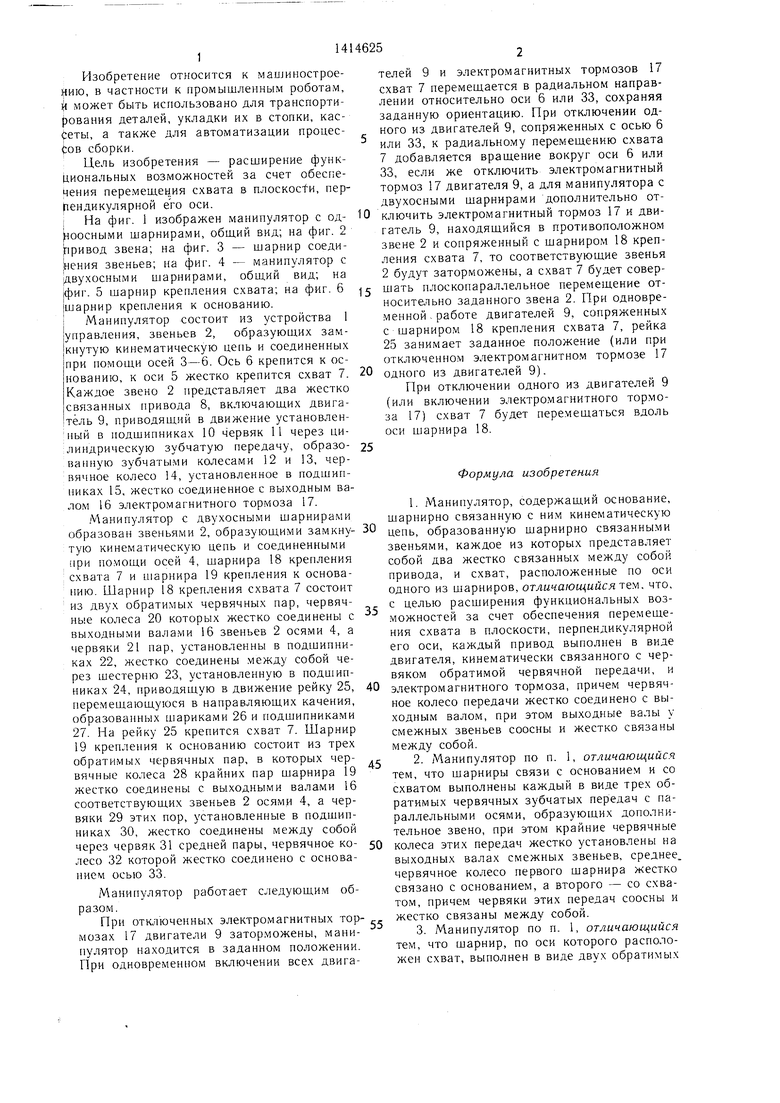
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический манипулятор | 1989 |
|
SU1660951A1 |
| Манипулятор | 1988 |
|
SU1590370A1 |
| Манипулятор | 1987 |
|
SU1465300A1 |
| Манипулятор | 1988 |
|
SU1627400A1 |
| Манипулятор А.И. полетучего | 1985 |
|
SU1247262A1 |
| Промышленный робот | 1990 |
|
SU1805028A1 |
| Манипулятор | 1987 |
|
SU1701420A1 |
| Манипулятор | 1983 |
|
SU1094734A1 |
| Манипулятор | 1983 |
|
SU1199610A1 |
| Манипулятор | 1989 |
|
SU1685701A1 |

Изобретение относится к области .машиностроения, в частности к промышленным роботам, и может быть использовано для транспортирования деталей, укладки их в стопки, кассеты, а также для авто.матиза- ции процессов -сборки. Целью изобретения является расширение функциональных воз.можностей за счет обеспечения перемещения схвата в плоскости, перпендикулярной его оси. Звенья 2 манипулятора выполнены из двух жестко связанных приводов 8 н образуют замкнутую кинематическую цепь. При врашении двигателя осуществляется движение обратимой червячной передачи, установленной в каждом приводе. Червячные колеса каждого привода жестко связаны с валами 3, 4, 5, 6. По оси этих валов (3, 4, 5, 6) образуются шарнирные соединения цепи, которые определяют плоскопараллельное перемешение схвата 7 при соответствую- шем включении приводов 8. 2 з.п. ф-лы, 6 ил.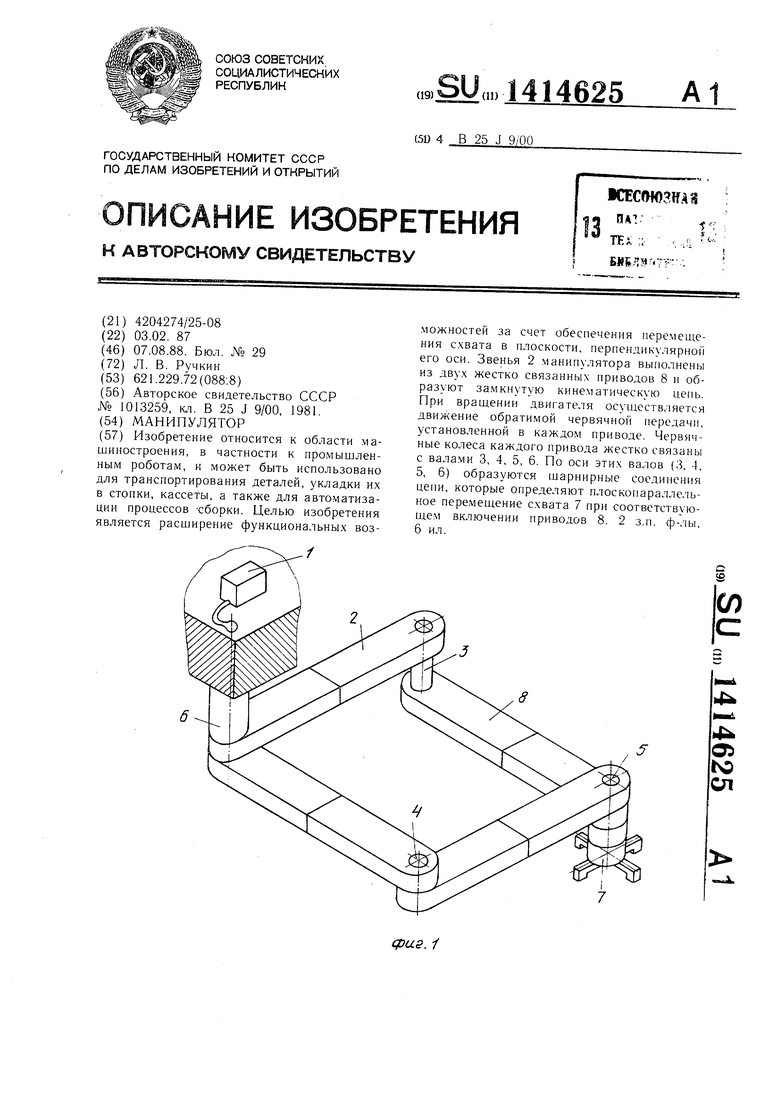
фиг. /
Изобретение относится к маи инострое- иию, в частности к промышленным роботам, и может быть использовано для транспортирования деталей, укладки их в стопки, кассеты, а также для автоматизации процес- toB сборки.
Цель изобретения - расширение функциональных возможностей за счет обеспечения переме1деи.ия схвата в плocкocfи, перпендикулярной его оси.
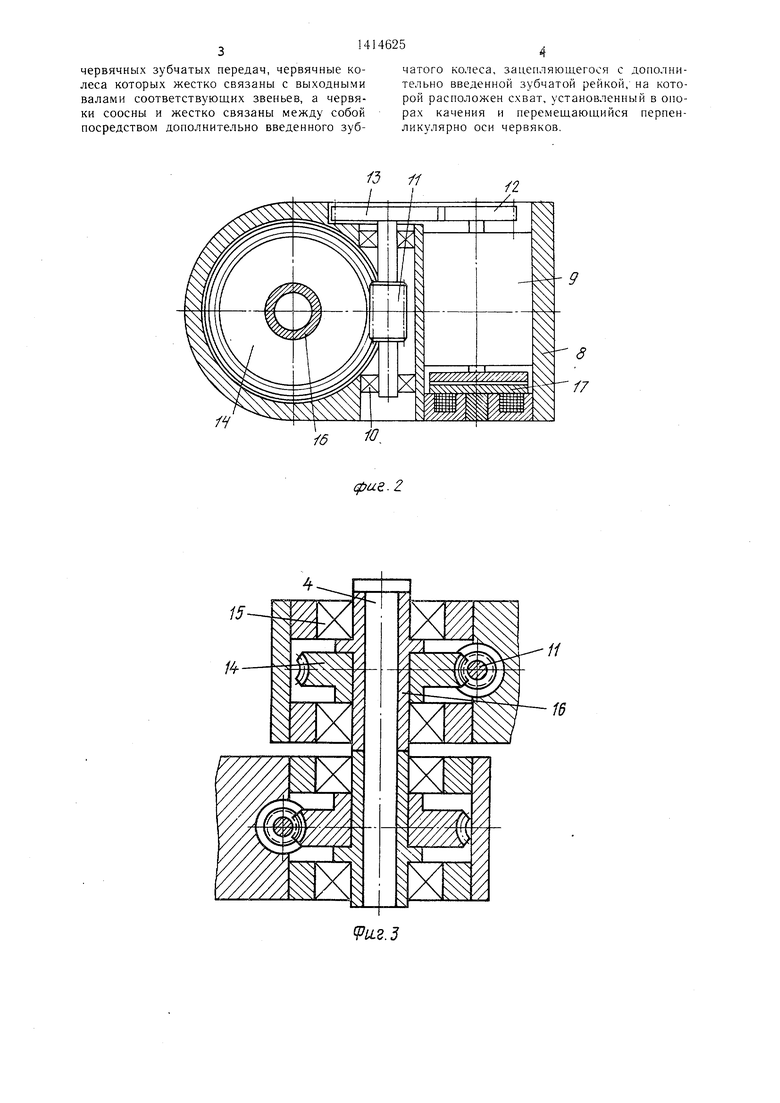
I На фиг. 1 изображен манипулятор с од- Иоосными шарнирами, обш,ий вид; на фиг. 2 Привод звена; на фиг. 3 - шарнир соеди- Мения звеньев; на фиг. 4 - манипулятор с двухосными шарнирами, общий вид; на |фиг. 5 шарнир крепления схвата; на фиг. 6 шарнир крепления к основанию. I Манипулятор состоит из устройства 1 управления, звеньев 2, образующих зам- |кнутую кинематическую цень и соединенных при помощи осей 3-6. Ось 6 крепится к основанию, к оси 5 жестко крепится схват 7. Каждое звено 2 представляет два жестко связанных привода 8, включающих двига- |тель 9, приводящий в движение установлен- пый в подшипниках 10 червяк 11 через ци- :линдрическую зубчатую передачу, образованную зубчатыми колесами 12 и 13, червячное колесо 14, установленное в подшипниках 15, жестко соединенное с выходным валом 16 электромагнитного тормоза 17.
Манипулятор с двухосными шарнирами образован звеньями 2, образующими замкну- тую кинематическую цепь и соединенными фи помощи осей 4, шарнира 18 крепления схвата 7 и шарнира 19 крепления к основа- ьшю. Шарнир 18 крепления схвата 7 состоит из двух обратимых червячных пар, червячные колеса 20 которых жестко соединены с выходными валами 16 звеньев 2 осями 4, а червяки 21 пар, установленны в подшипниках 22, жестко соединены между собой через шестерню 23, установленную в подшипниках 24, приводящую в движение рейку 25, перемещающуюся в направляющих качения, образованных шариками 26 и подшипниками 27. На рейку 25 крепится схват 7. Шарнир 19 крепления к основанию состоит из трех обратимых червячных пар, в которых червячные колеса 28 крайних пар шарнира 19 жестко соединены с выходными валами 16 соответствующих звеньев 2 осями 4, а червяки 29 этих пор, установленные в подшипниках 30, жестко соединены между собой через червяк 31 средней пары, червячное колесо 32 которой жестко соединено с основанием осью 33.
Манипулятор работает следующим образом.
При отключенных электромагнитных тормозах 17 двигатели 9 заторможены, манипулятор находится в заданном положении. При одновременном включении всех двига
0
5
0
телей 9 и электромагнитных тормозов 17 схват 7 перемещается в радиальном направлении относительно оси 6 или 33, сохраняя заданную ориентацию. При отключении одного из двигателей 9, сопряженных с осью 6 или 33, к радиальному перемещению схвата 7 добавляется вращение вокруг оси 6 или 33, если же отключить электромагнитный тормоз 17 двигателя 9, а для манипулятора с двухосными шарнирами дополнительно отключить электромагнитный тормоз 17 и двигатель 9, находящийся в противоположном звене 2 и сопряженный с шарниром 18 крепления схвата 7, то соответствующие звенья 2 будут заторможены, а схват 7 будет совершать плоскопараллельное перемещение относительно заданного звена 2. При одновременной , работе двигателей 9, сопряженных с шарниром 18 крепления схвата 7, рейка 25 занимает заданное положение (или при отключенном электромагнитно.м тормозе 17 одного из двигателей 9).
При отключении одного из двигателей 9 (или включении электромагнитного тормоза 17) схват 7 будет перемещаться вдоль оси шарнира 18.
0
0
5
0
5
Формула изобретения
червячных зубчатых передач, червячные колеса которых жестко связаны с выходными валами соответствующих звеньев, а червяки соосны и жестко связаны между собой посредством дополнительно введенного зуб/У
чатого колеса, зацепляющегося с дополнительно введенной зубчатой рейкой, на которой расположен схват, установленный в опорах качения и перемещающийся перпен- ликулярно оси червяков.
фа.г.2
fPu.s.5
30 28 29
CPU г. 5
| Манипулятор | 1982 |
|
SU1013259A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
