| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2001 |
|
RU2184030C1 |
| Промышленный робот | 2015 |
|
RU2654096C2 |
| Промышленный робот | 1987 |
|
SU1414629A1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2003 |
|
RU2248270C1 |
| Промышленный робот | 1990 |
|
SU1729740A1 |
| Робот промышленный | 2014 |
|
RU2634392C2 |
| Гибкий технологический модуль | 1986 |
|
SU1586825A1 |
| Схват манипулятора | 1980 |
|
SU965765A1 |
| Промышленный робот | 1987 |
|
SU1426781A1 |
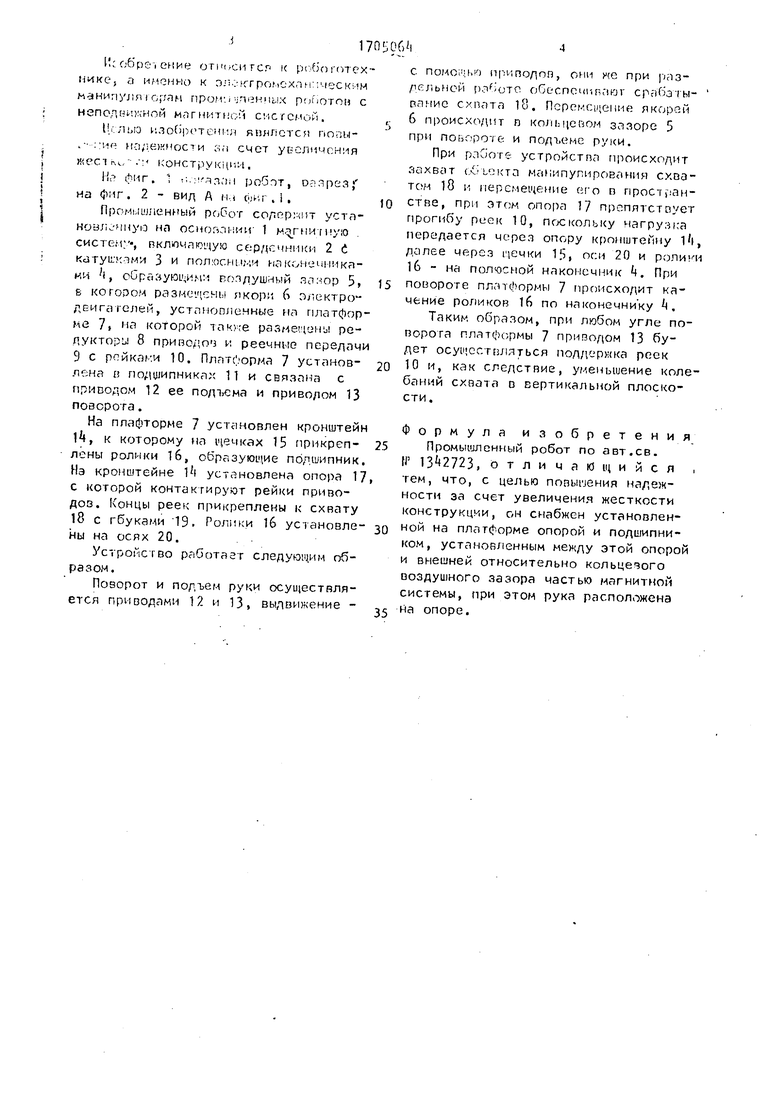
Изобретение относится к робототехнике, а именно к электромеханическим манипулятором промышленных роботов с неподвижной магнитной системой. Целью изобретения является повышение належности за счет увеличения жесткости конструкции. При работе робота происходят захват объекта манипулиропания схватом 18 и перемещение его в пространстве с помощью привода 12 подъема и привода 13 поворота платформы, а такие приводов выдвижения руки с реечными редукторами 9 и электродвигателями, якори 6 которых, расположены в воздушном зазоре 5 магнитной системы. Наличие роликов 16, образующих подшипник между полюсным наконечником и опорой 17, на которой расположены рейки 10, позволяет уменьшить в процессе мани- пулирования колебания схвата 18. 2 ил.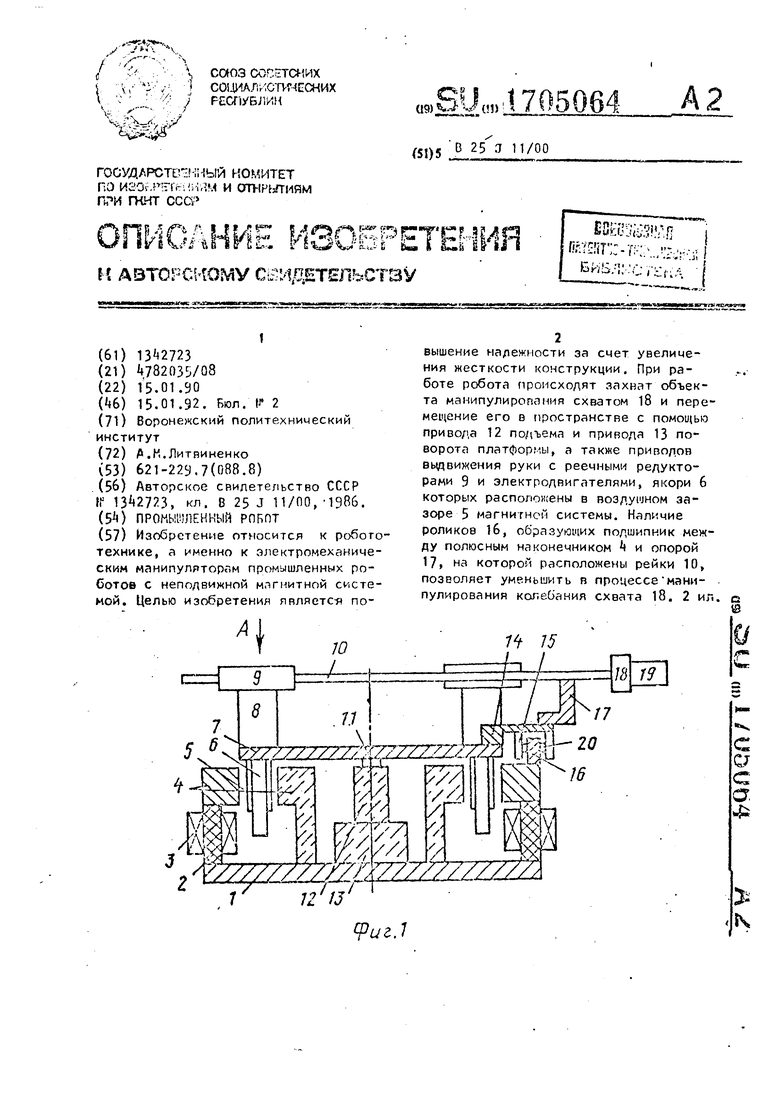
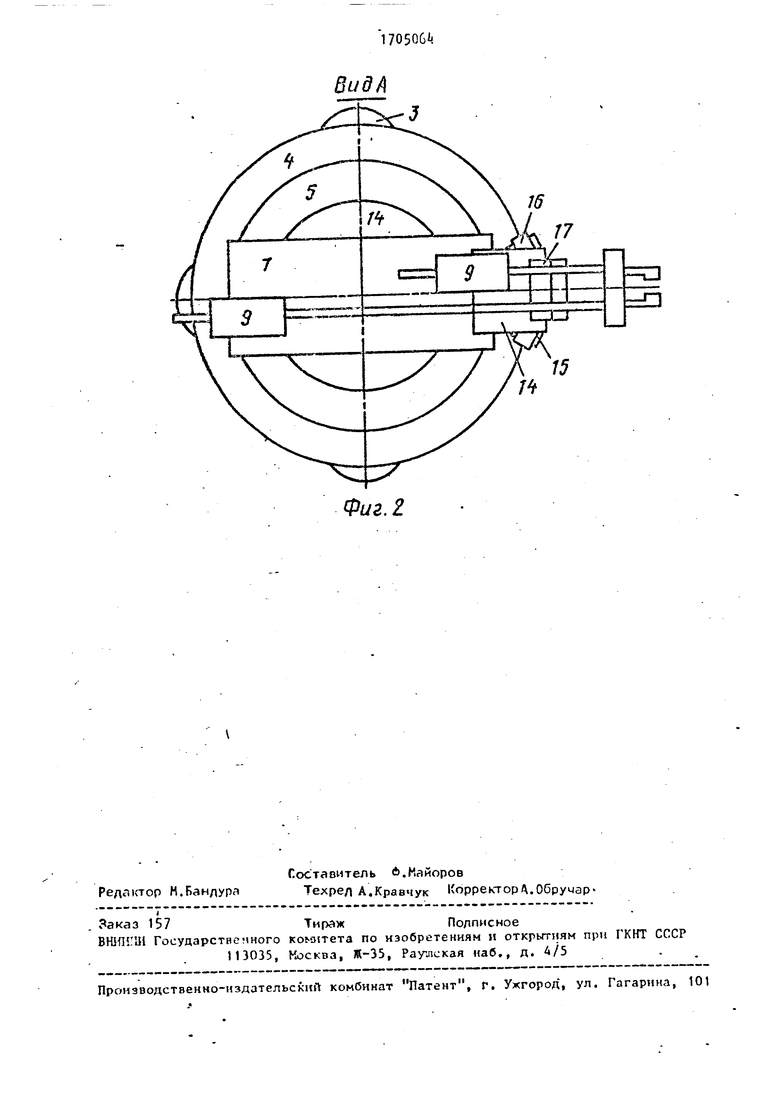
Фиг. 2
| Авторское свилетельство СССР Я , кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
