I
Изобретение относится к одноковшовым экскаваторам, а именно к устройствам для управления механизмами подъема и тяги драглайна в процессе транспортировки ковша с зашитой от растяжкн.
Известны устройства для управления механизмами подъема и тяги драглайна с защитой от растяжки ковша, осуществляющие управление в функции суммы длин подъемного и тягового канатов 1J. Однако для, известных устройств характерны недостаточная надежность и конструктивная сложность, вызываемые необходимостью установки механических датчиков длин канатов на лебедках.
Известно также устройство для управления механизмами подъема и тяги драглайна, содержащее два суммирующих усилителя, выход первого из которых подключен к управляющему входу привода механизма тяги, подключенные ко входу первого суммирующего усилителя два датчика моментов нагрузки и подключенные ко входам пер-: вого и второго суммирующих усилителей два датчика скоростей механизмов подъема и тяги, блок деления, блок дифференцирования, нелинейный блок и блок сравнення.
причем ко входу первого суммирующего усилителя подключен выход блока сравнения, два входа которого соединены с выходами датчика момента нагрузки механизма подъема и нелинейного блока, подключенного к выходу блок деления, входы делимого н делителя которого соединены соответственно с выходами блока дифференцирования, подключенного к выходу датчика момента нагрузки механизма подъема и с выходами второго суммирующего усилителя (2|.
Недостатками известного устройства являются сложность н недостаточная надежность управления, обусловленная прежде всего сложностью и недостаточной надеж ностью определения производной момента нагрузки механизма подъема по сумме длин канатов, различными значениями указанной производной в разных точках границы рабочей зоны, а также возможностью появления ложных сигналов управления в процессе копания, когда большие значения моментанагрузки механизма тяги н существенные значения производной момента нагрузки подъема по сумме длин канатов могут привести к превышению уставки защнты. Это снижает надежность управления и производительность драглайна в целом.
Цель изобретения - упрощение и повышение надежности управления.,
Эта цель достигается тем, что устройство снабжено двумя управляемыми диодными блоками ограничения, разомкнутым операционным усилителем с двумя входами и включенным в цепь его обратной связи стабилитроном, источником постоянного напряжения и инерционным звеном, причем первый и второй диодные блоки ограничения включены в цепь обратных связей соответственно первого и второго суммирующих усили.телей, а их управляющие входы соединены с выходом разомкнутого усилителя, два входа которого подключены к выходам датчиков момеятов нагрузки механизмов подъема и тяги, входы второго суммирующего усилителя соединены с выходами датчика моМента нагрузки механизма подъема и источника постоянного напряжения, выход второго суммирующего усилителя подключен к управляющему входу механизма тяги и через инерционное звено-« управляющему входу механизма подъема, к которому подключен также выход первого суммирующего усилителя.
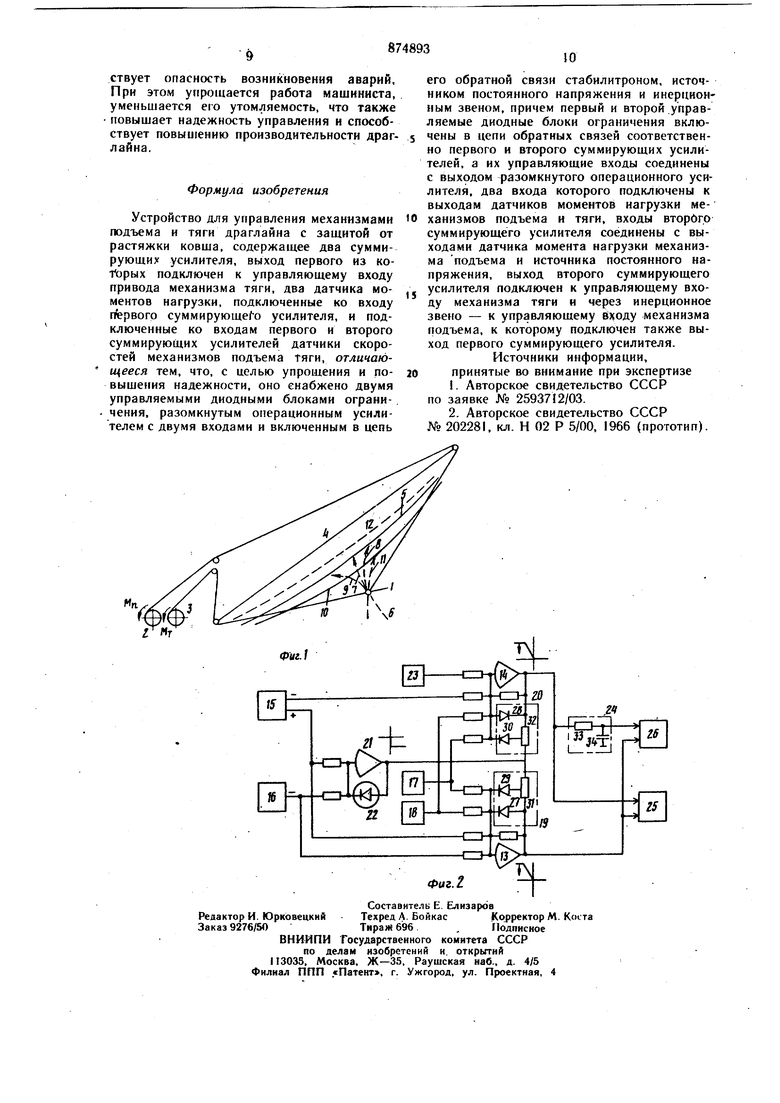
На фиг. приведены обеспечиваемые предлагаемым устройством границы приближения ковша к стреле и траектории ковша в процессе управления с защитой от растяжки ковша; на фиг. 2 - схема устройства.
В процессе транспортировки ковща 1 (фиг. 1) при любом его положении момент Мп нагрузки механизма 2 подъема больще момента Мт нагрузки механизма 3 тяги. С приближением ковша к оси стрелы 4 относительная разность между ними уменьшается, а на кривой 5 произведение момента MT нагрузки механизма тяги на постоянный коэффициент k (здесь 1 1,22) равно моменту Мп нагрузки механизма подъема, т. е. kM. -При этом указанное равенство сохраняется на кривой 5 независимо от загрузки ковща. Поэтому если сравнивать произведение момента нагрузки механизма тяги на постоянный коэффициент с моментом нагрузки механизма подъема и при достижении положительного значения результата этого сравнения подавать на механизм подъема и тяги сигнал, препятствующий приближению ковща к стреле, будет предотвращено одно из последствий растяжки ковща - удар ковша по стреле. В случае неправильных действий машиниста, если ковщ приближается к стреле, например, по траектории 6, указанный сигнал зашиты прекращает приближение ковща к стреле с упреждением, пропорциональным алгебраической сумме скоростей механизмов подъема и тяги и, в завцсимости от величины начальных скоростей этих механизмов, либо останавливает ковщ на граничной
кривой 5 по траектории 7, либо переводит его на траектории вдоль граничной кривой 5 к вершине стрелы 8 или к основанию стрелы 9, в зависимости от того, осуществлялся ли при этом подъем ковша или его опускание.
Ограничение приближения ковща к стреле границей 5 обеспечивается независимо от загрузки ковща, однако поскольку моменты нагрузки механизмов подъема Мп и
тяги MT пропорциональны загрузке ковша, с уменьщением загрузки ковша различие между величинами kMy и М уменьшается и достигает значений, при которых благодаря регулированию в функции алгебраической суммы скоростей механизмов появляется сигнал защиты на больщем -расстоянии от оси стрелы. Поскольку опасность удара ковща по стреле возрастает именно при уменьшении загрузки ковша, обеспечиваемое предлагаемым способом увеличение упреждения срабатывания защиты с умень. щением загрузки ковша увеличивает надежность защиты:
Управление механизмами подъема и тяги в функции резальтата сравнения произведения момента нагрузки механизма тяги
5 на постоянный коэффициент с моментом нагрузки механизма подъема обеспечивает защиту от одного из последствий режима растяжки - удара ковша по стреле, однако при этом не обеспечивается защита от другого последствия режима растяжки - от превышения момента нагрузки механизма подъема,а вместе с тем и нагрузок в рабочем оборудовании, над допустимой .величиной, которое возникает при полностью загруженном ковще после пересечения им
5 граничной кривой 10, т. е. раньше, чем ковш достигает границу 5. Это может привести к разрушению рабочего оборудования и при исключении удара ковша по стреле.
Поэтому сравнивают момент нагрузки механизма подъема с его допустимым значением и при достижении положительного значения результата этого сравнения (например, при приближении груженого ковша к стреле по трактории II) подают на механизмы подъема и тяги сигналы, препятству5 ющие приближению ковща к стреле, а вместе с тем ограничивающие нагрузки допустимыми значениями. Однако с уменьщением, загрузки ковша граничная кривая, соответствующая допустимой величине момента нагрузки, приближается к оси стрелы и при
порожнем ковше занимает положение 12, при котором возрастает опасность удара ковща по стреле. В этом случае осуществляется описанное выше воздействие на механизмы подъема и тяги в функции резульJ5 тата сравнения kMt и Мп , вследствие чего приближение ковша к стреле ограничивается границей 5. Только совместное одновременное управление механизмами подъема и тяги в функции результатов
сравнения произведения момента нагрузки механизма тягн на постояиный коэффицнент с моментом нагрузки механизма подъема, а также момента нагрузки механизма подъема с его допустимым значением обеспечивает защиту от растяжки ковша, полностью исключая возможность разрушения рабочего оборудования как вследствие удара ковша по стреле, так и вследствие возникновения недопустимых нагрузо :, в то время как отдельное управление в функции каж дои из этих величин не обеспечивает защиты от аварий.
Устройство содержит два суммирующих усилителя 13 и 14 (фиг. 2), выход первого из которых подключен к управляющему входу механизма тяги, подключенные ко входу первого суммирующего усилителя 13 два датчика 15 и 16 моментов нагрузки и подключенные ко входам первого 13 и второго 14 суммирующих усилителей два датчика 17 и 18 скоростей механизмов подъема и тяги, а также снаб,жено двумя управляемыми диодными блоками 19 и 20 ограничения, разомкнутым операционным усилителем 21 с двумя входами и включенным в цепь его обратной связи стабилитроном 22, источником 23 постоянного напряжения и инерционным звеном 24, причем первый 19 и второй 20 диодные блоки ограничения включены в цепи обратных связей соответственно первого 13и второго 14 сумми.рующих усилителей, а их управляющие входы соединены с выходами разомкнутого операционного усилителя 21i два входа которого подключены к выходам датчиков 15 и 16 моментов нагрузок механизмов подъема и тяги, входы второго суммирующего усилителя 14 соединены с выходами датчика 15 момента нагрузки механизма подъема и источника 23 постоянного напряжения, выход вторЪго суммирующего усилителя 14 подключен к управляющему входу механизма 25 тяги и через инерционное звено 24- к управляющему входу механизма 26 подъема, к которому подключен также выход первого суммирующего усилителя 13.
Каждый из двух управляемых диодных блоков 19 и 20 ограничения содержит первый диод 27 (или 28), включенный непосредственно между выходом и входом суммирующего усилителя 13 (или 14) и второй диод 29 (или 30), включенный в цепь обратной связи суммирующего усилителя 13 (или 14) через потенциометр 31 (иди 32), который подключен к управляющему входу соответствующего управляемого диодного блока 19 ограничени$| (или 20), соединенного с выходом разомкнутого операционного усилителя 21.
Инерционное звено 24 может быть выполнено в виде RC-цепочки, состоящей из резистора 33 и конденсатора 34.
Устройство работает следующим образом. Выходные снгналы датчика 15 момента нагрузки механизма подъема и датчика 16 момента нагрузки механизма тяги подают
5 с противоположными знакамн на входы первого суммирующего усилителя 13, где происходит; сравнение величин kM н М„ (умножение величины Мт на постоянный коэффициент k обеспечивается выбором соответствующего значения входного резистора
в первого суммирующего усилителя 13). При kMr Мп , когда ковщ находится ниже граничной кривой 5 и отсутствует опасность удара ковша по стреле, диод 27 первого управляемого диодного блока 19 ограничения
j открыт и обеспечивает нулевое значение выходного напряжения первого суммирующего усилителя 13, что исключает влияние защиты на нормальные режнмы управления в процессе транспортировки ковша в рабочей зоне, обеспечивая высокую маневренность и производительность драглайна. При kMr М„ , когда ковш приближается к граничной кривой 5, диод 27 заперт, а с выхода первого суммирующего усилителя 13 на управляющие входы механизмов 25 тяги и 26 подъема поступает сигнал, препятSствующий приближению ковща к стреле. Поступающие на входы первого суммирующеГо усилителя 13 выходные сигналы датчиков 17 и 18 скоростей механизмов подъема и тяги обеспечивают упреждение подачн
а сигнала защиты на управляющие входы механизмов подъема и тяги пропорционально алгебраической сумме скоростей этих механизмов, исключая перерегулирования и колебания в процессе защиты.
Сигнал осуществляет одинаковое изменение скоростей механизмов подъема и тяги до их выравнивания с противоположными знаками, вследствие чего ковш либо останавливается на границе 5 (траектория 7) при одинаковых начальных скоростях механизмов в сторону уменьшения длин канатов (заведомо неверные действия машиниста)., либо продолжает режим подъема по траектории 8 вдоль границы 5 (скорость механизма тяги в сторону увеличения длины каната выбрана машинистом меньше
5 скорости привода подъема), либо продолжает режим опускания по траектории 9 вдоль границы 5 (скорость механизма подъема при опускании ковша выбрана машинистом меньше скорости механизма тяги). Выходной сигнал датчика 15 момента Мп
нагрузки механизма подъема и выходной сиг нал источника 23 постоянного напряжения, . пропорциональный допустимому значению Мп доа. момента нагрузки механизма подъема, подают с противоположными знаками
на входы второго суммирующего усилителя 14, где осуществляется их сравнение. При Мп М„доп , когда ковш находится в рабочей зоне и отсутствует опасность превышения нагрузкой допустимого
начения, диод 28 второго управляемого иодного блока 20 ограничения открыт, а ЫХ9ДНОН сигнал втооого суммирующего снлнтеля 14 отсутствует. При приближении груженого ковша к граничной кривой 10 результат сравнения М и . становится положительным, диод 28 заперт, а выходной сигнал второго суммирующего усилителя 14 поступает на управляющий вход механизма 25 тяги и через инерционное звено 24 - на управляющий вход механизма 26 подъема, прекращая приближение ковша к стреле. Поступающие на входы второго суммирующего усилителя 14 выходные сигналы датчиков 17 и 18 скоростей механизмов подъема и -тяги обеспечивает упреждение появления сигнала защиты пропорционально алгебраической сумме скоростей механизмов подъема и тяги, исключая перерегулирования и колебания в процессе защити.
Благодаря введению инераионного звена 24 между выходом второго суммирующего усилителя 14 и управляющим входом механизма 26 подъема более интенсивное воздействие сигнала защиты обеспечивается на управляющий вход механизма 25 тяги, что при неточных действиях мащиниста переводит груженый ковш на траектор Ю 11 вдоль границы Шдля продолжения подъема ковща. Только в случае, если за время действия защиты машинист не внесет коррективы в свои неточные действия, будет осуществлено также воздействие на механизм подъема, обеспечивая надежную защиту от превышения нагрузкой допустимой величины. Такое построение устройства, обеспечивая высокую надежность защиты, способствует сохранению высокой производительности драглайна.
При транспортировке Груженого ковща защита от растяжки обеспечивается вторым суммирующим усилителем. 14, ограничиваюuigrp приближение коаща к стреле граничной кривой iO, а первый операционный усилитель 13 выполняет при этом роль вспомогательной защиты, которая сработает в случае отказа защиты, обеспечиваемой вторым суммирующим усилителем 14, что повышает надежность защиты.
С понижением загрузки ковща уменьшается момент нагрузки механизма подъема, а потому граничная кривая, ограничивающая с помощью второго суммирующего усилителя 14 приближение ковша к стреле в функции момента нагрузки механизма подема, перемещается от кривой 10 до кривой 12, в то время как граничная кривая 5, ограничивающая с помощью первого суммирующего усилителя 13 приближение ковща к стреле на основе сравнення величин tcM и Мр , не меняет свое положение изменением загрузки ковша.
При порожнем ковше ограничение приближения ковша к стреле обеспочиТвается с помощью первого суммирующего усилителя 13 граничной кривой 5 (причем с повышенным упреждением пропорционально алгебраической сумме скоростей механизмов подъема и тяги благодаря уменьшению значений нагрузок этих механизмов), что обеспечивает защиту как от удара ковша по стреле, так и от превышения нагрузкой
допустимой величины, которая при этом достигается лишь на кривой 12, расположенной ближе к стреле.
В процессе транспортировки ковша момент нагрузки механизма подъема больше момента нагрузки механизма тяги, поэтому разность пропорциональных этим моментам сигналов, поступающих с выхода датчиков 15 и 16 на входы разомкнутого операционного усилителя 21, обеспечивает на его выходе конечное значение напряжения, ограничиваемого стабилитроном 22, которое поступает на управляющие входы первого - 9 и второго 20 управляемых диодных ограничителей и запирает диоды 29 и 30. При 5 этом обеспечивается возможность появления на выходах первого 13 и второго 14 суммирующих усилителей сигналов защиты в описанных выше режимах приближения ковша к стреле, а величина этих сигналов ограничивается с помощью потенциометров 3; и 32 значениями, допустимыми для механизмов 25 тяги и 26 подъема.
В режиме копания, когда отсутствует опасность возникновения режима растяжки, момент нагрузки механизма подъема меньше момента нагрузки механизма тяги, стабилитрон 22 работает в режиме диода и закорачивает цепь обратной связи разомкнутого операционного усилителя 21, выходное напряжение которого при этом равно нулю. Поскольку при этом равно нулю наjj пряжение на управляющих входах управляемых диодных блоков 19 и 20 ограничения, исключается возможность появления сигналов на выхйдах первого 13 н второго 14 суммирующих усилителей при любых сигналах на их входах, что исключает воз5 можность ложного срабатывания защиты и этим повышает надежность управления. Таким образом, изобретение позволяет упростить и повысить надежность управления за счет выполнения более простых операций (например, сравнение сигналов вмес то операции определения производной момента нагрузки механизма подъема по сумме длин канатов), с больщей точностью и надежностью характеризующих контролируемые в процессе управления параметры, 5 а потому повышающих надежность управления, а также за счет осуществления защиты воздействием на механизмы тяги и подъема и исключения ложных срабатываний зашиты в режимах, в которых отсут

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ защиты драглайна от аварийных режимов при транспортировке ковша и устройство для его осуществления | 1978 |
|
SU744076A1 |
| Устройство защиты стрелы экскаваторадраглайна от растяжки | 1977 |
|
SU737576A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ КОВША ОТНОСИТЕЛЬНО СТРЕЛЫ И БЛОКОВДРАГЛАЙНА | 1967 |
|
SU195077A1 |
| Способ управления электрическими приводами драглайна и устройство для его осуществления | 1978 |
|
SU742542A1 |
| Устройство для управления электрическим приводом тяги драглайна | 1975 |
|
SU717228A1 |
| Устройство для защиты стрелы экскаватора-драглайна | 1983 |
|
SU1194972A2 |
| Устройство защиты стрелы от растяжки ковша экскаватора-драглайна | 1977 |
|
SU777157A1 |
| Устройство для защиты стрелы экскаватора-драглайна | 1979 |
|
SU787562A1 |
| Способ защиты стрелы экскаваторадраглайна | 1977 |
|
SU717239A1 |
| Способ взаимосвязанного управления электроприводами подъема и тяги драглайна | 1971 |
|
SU771833A1 |
