Изобретение относится к оборудованию для испытанийтранспортных средств и может быть использовано при исследований управляемости и устойчивости движения транспортных средств.
Цель изобретения - расширение функциональных возможностей и повышение достоверности результатов исследований. ;
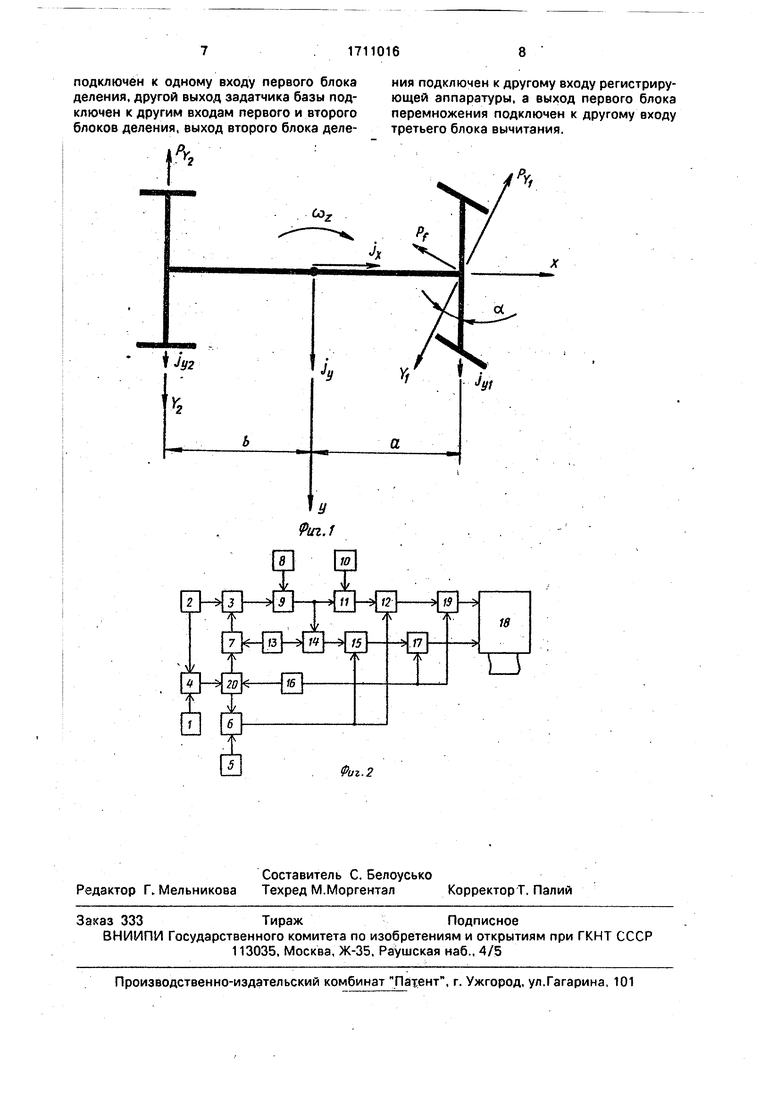
На фиг. 1 изображена расчетная схема движения двухосного транспортного средства; на фиг. 2 - блок-схема устройства.
Устройство содержит датчик 1 поперечного ускорения задней оси, датчик 2 п рпе- речного ускорения передней оси транспортного средства, первый блок 3 вычитания, один вход которого подключен к выходу датчика 2 поперечного ускорения передней оси, второй блок.4 вычитания, один вход которого подключен к выходу датчика 1 поперечного ускорения задней оси, другой вход-к выходу датчика 2 поперечного ускорения передней оси, задатчик 5 момента инерции транспортного средства, первый блок 6 перемножения, один вход которого подключен к выходу задатчика 5 момента инерции транспортного средства, второй блок перемножения, выход которого подключен к другому входу первого блока 3 вычитания, задатчик 8 массы транспортного средства, третий блок 9 перемножения, ОДИН;вход которого подключен к выходу первого блока 3 вычитания, другой вход - к выходу задатчика 8 массы транспортного средства, задатчик 10 расстояния от центра масс транспортного средства до задней оси, четвертый блок 11 перемножения, один вход которого подключен к выходу третьего блока 9 перемножения, другой вход - к выО
сь
ходу задатчика 10 расстояния от центра масс транспортного средства до задней оси, сумматор 12, один вход которого подключен к выходу четвертого блока 11 перемножения, другой - к выходу первого блока 6 перемножения, задатчик 13 расстояния от центра масс транспортного средства до передней оси, один выход которого подключен к другому входу второго блока 7 перемножения, пятый блок 14 перемножения, один вход которого подключен к выходу третьего блока 9 перемножения, другой вход - к другому выходу задатчика 13 расстояния от центра масс транспортного средства до передней оси, третий блок 15 вычитания, один вход которого подключен к выходу пятого блока 1.4 перемножения, другой вход - к выходу первого блока 6 перемножения, задатчик 16 базы, первый блок 17 деления, один вход которого подключен к выходу третьего блока 15 вычитания, другой вход - к выходу задатчика 16 базы, регистрирующую аппаратуру 18, один вход которой подключен к выходу первого блока . 17 деления, второй блок 19 деления, один
вход которого подключен к выходу сумматора 12, другой вход - к другому выходу задатчика 16 базы, выход - к другому входу регистрирующей аппаратуры 18, и третий блок 20 деления, один вход которого подключен к выходу второго блока 4 вычитания, другой вход - к одному выходу задатчика 16 базы, один выход подключен к другому входу первого блока 6 перемножения, а другой выход подключен к одному входу второго блока 7 перемножения. Соединение датчиков и блоков устройства показано на фиг. 2 стрелками. Все датчики и блоки обеспечиваются энергией от источника постоянного тока (не показан).
. Предлагаемое устройство работает следующим образом.
Сигналы от датчика 1 поперечного ускорения задней оси и сигналы от датчика 2 поперечного ускорения передней оси поступают на соответствующие входы второго блока 4 вычитания, на выходе которого образуется напряжение, пропорциональное разности поперечного ускорения jyi передней оси и поперечного ускорения jya задней оси (Jyi-jy2). Сигнал с выхода второго блока 4 вычитания и задаваемый задатчи- ком 16 уровень напряжения, соответствую- щий значению базы L транспортного средства, поступают на соответствующие входы третьего блока 20 деления, на выходе которого формируется напряжение, соответствующее значению углового ускорения оц транспортного средства относительно вертикальной оси вращения, проходящей через
центр масс транспортного средства, и равное )/L. С выхода задатчика 5 момента инерции Iz транспортного средства сигнал поступает на один вход первого блока 6 перемножения, на другой вход которого поступает сигнал с одного выхода третьего блока 20 деления. На выходе первого блока 6 перемножения образуется сигнал, пропорциональный произведению момента
инерции Iz транспортного средства и углового ускорения Mz(lz cfe). С другого выхода третьего блока 20 деления сигнал поступает на один вход второго блока 7 перемножения, на другой вход которого
поступает сигнал с одного выхода задатчика 13 расстояния а от центра масс транспортного средства до передней оси. На выходе второго блока 7 перемножения образуется Сигнал, равный произведению углевого ускорения efe на расстояние а от центра масс транспортного средства до передней оси (а ctJz). С выхода датчика 2 поперечного ускорения передней оси сигнал поступает на один вход первого блока 3
вычитания, на другой вход которого поступает сигнал с выхода второго блока 7 перемножения. На выходе первого блока 3 вычитания образуется сигнал, пропорциональный поперечному ускорению Jy центра
масс транспортного средства, равному (jy jyi-a ctJzj. С выхода первого блока 3 вычитания сигнал поступает на один вход третьего блока 9 перемножения, на другой вход которого поступает сигнал с выхода задатчика массы m транспортного средства. На выходе третьего блока 9 перемножения образуется сигнал, соответствующий произведению поперечного ускорения jy центра масс транспортного
средства на массу m транспортного средства {jy -m). С выхода третьего блока 9 перемножения сигнал поступает на один вход четвертого блока 11 перемножения, на другой вход которого поступает сигнал с выхода задатчика 10 расстояния b от центра масс транспортного средства от задней оси. На выходе четвертого блока 11 перемножения образуется сигнал, пропорциональный произведению поперечного
ускорения jy центра масс транспортного средства на массу m транспортного средства и на величину расстояния b от центра масс транспортного средства до задней оси Оу -т -о). С выхода четвертого блока
ц перемножения сигнал поступает на один вход сумматора 12, на другой вход которого поступает сигнал с выхода первого блока 6 перемножения. На выходе сумматора 12 образуется сигнал, соответствующий выражениюQy -m-,b+lz ftJz), который поступает на один вход второго блока 19 деления, на другой вход которого поступает сигнал с другого выхода задатчика 16 базы. На выходе второго блока 19 деления образуется сигнал, пропорциональный величине боковой силы yi, действующей на колеса передней оси транспортного средства и соответствующей выражению yi {jymb+tz ftJz)/L С выхода второго блока 19 деления сигнал поступает на регистрирующую аппаратуру.
С выхода третьего блока 9 перемножения сигнал поступает на один вход пятого блока 14 перемножения, на другой вход ко- торого поступает сигнал с другого выхода задатчика 13 расстояния а от центра масс транспортного средства до передней оси. На выходе пятого блока 14 перемножения образуется сигнал, пропорциональный про- изведению поперечного ускорения jy центра масс транспортного средства на массу m транспортного средства и на величину расстояния а от центра масс транспортного средства до передней оси (jy ma). С выхода пятого блока 14 перемножения сигнал поступает на один вход третьего блока 15 вычитания, на другой вход которого поступает сигнал с выхода первого блока 6 перемножения. На выходе третьего блока 15 вычитания образуется сигнал, соответствующий выражению (jyma-lz ftfc). С выхода третьего блока 15 вычитания сигнал поступает на один вход первого блока 17 деления, на другой вход которого поступает сигнал с другого выхода задатчика 16 базы транспортного средства. На выходе первого блока 17 деления образуется сигнал, пропорциональный величине боковой силы уа, действующей на колеса задней оси транс- портного средства и соответствующей выражению yzKlyroa-lz ftЈ)/L С выхода первого блока 17 деления сигнал поступает на регистрирующую аппаратуру.
Таким образом, в предлагаемом устрой- стве обеспечивается определение боковых сил, действующих на колеса задней и передней осей при движении транспортного средства с любой скоростью, на кривых произвольного радиуса и с л.юбым возмущени- ем, прикладываемым к транспортному средству, что расширяет функциональные возможности устройства и повышаетдоСто- верность результатов при исследовании управляемости и устойчивости движения транспортных средств.
Формула изобретения
Устройство для исследования управляемости и устойчивости движения транспортного средства, содержащее датчик поперечного ускорения задней оси, датчик поперечного ускорения передней оси, первый блок вычитания, о.дин вход которого подключен к выходу датчика поперечного ускорения передней оси, первый блок перемножения, второй блок перемножения, подключенный к другому входу первого блока вычитания, второй и третий блоки вычитания, первый и второй блоки деления и регистрирующую аппаратуру, один вход которой подключен к выходу первого блока деления, отличающееся тем, что, с целью расширения функциональных возможностей и повышения достоверности результатов исследований, оно снабжено задатчиком момента инерции транспортного средства, выход которого подключен к одному из входов первого блока перемножения, третьим блоком деления, один вход которого подключен к выходу второго блока вычитания, один выход - к другому входу первого блока перемножения, другой выход - к одному входу второго блока перемножения, задатчиком базы транспортного средства, один вход которого подключен к другому входу третьего блока деления, задатчиком расстояния от центра масс транспортного средства до передней оси, один выход которого подключен к другому входу второго блока перемножения, задатчиком массы транспортного средства, третьим блоком перемножения, один вход которого подключен к выходу первого блока вычитания, другой - к выходу задатчика массы транспортного средства, задатчиком расстояния от центра масс транспортного средства до заданной оси, четвертым блоком перемножения, один вход которого подключен к выходу третьего блока перемножения, другой - к выходу задатчика расстояния от центра масс транспортного средства заданной оси, пятым блоком перемножения, один вход которого подключен к выходу третьего блока перемножения, другой - к другому входу задатчика расстояния от центра масс транспортного средства до передней оси, выход - к одному входу третьего блока вычитания, сумматором, один вход которого подключен к выходу четвертого блока перемножения, другой - к выходу первого блока перемножения, выход - к одному входу второго блока деления, при этом выход датчика поперечного ускорения задней оси подключен к одному входу второго блока вычитания, выход датчика поперечного ускорения передней оси подключен к другому входу второго блока вычитания, выход третьего блока вычитания
подключён к одному входу, первого блока деления, другой выход задатчика базы подключен к другим входам первого и второго блоков деления, выход второго блока делеI/V
1 1ц
ния подключен к другому входу регистрирующей аппаратуры, а выход первого блока перемножения подключен к другому входу третьего блока вычитания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для исследования управляемости и устойчивости движения транспортного средства | 1988 |
|
SU1643980A1 |
| Устройство для определения параметров движителей транспортного средства | 1989 |
|
SU1735733A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАССЫ В НЕВЕСОМОСТИ | 2002 |
|
RU2207520C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАССЫ В НЕВЕСОМОСТИ | 2001 |
|
RU2199093C1 |
| Устройство для управления токарнымСТАНКОМ | 1979 |
|
SU830314A1 |
| Система торможения транспортного средства | 1986 |
|
SU1526570A3 |
| Регулятор скорости движения транспортного средства | 1986 |
|
SU1498646A1 |
| Устройство для определения пространственно-энергетических характеристик лазерного излучения | 1988 |
|
SU1573353A2 |
| Устройство для регулирования рабочего режима землеройно-транспортной машины | 1980 |
|
SU899806A1 |
| Двухзвенное транспортное средство | 1989 |
|
SU1676913A1 |
Изобретение относится к оборудованию для испытаний транспортных средств и мо-: i жет быть использовано при исследовании управляемости и устойчивости движения. транспортных средств. Цель изобретения - расширение функциональных возможностей и повышение достоверности результатов исследований. Устройство содержит датчик 1 поперечного ускорения задней оси, датчик 2 поперечного ускорения передней оси, задатчик 5 момента инерции транспортного средства, задатчик 8 массы транспортного средства, задатчик 10, 13 расстояния от центра масс транспортного средства до задней и передней осей, задатчик 16 базы транспортного средства, схему обработки сигналов датчиков и регистрирующую аппаратуру. При движении транспортного сред-, ства устройство определяет боковые силы, действующие на колеса передней и задней осей транспортного средства. 2 ил. у Ё
to.
МУ2
У Риг.1
Jyt
LJ
Риг.2
| Устройство для исследования управляемости и устойчивости движения транспортного средства | 1988 |
|
SU1643980A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
