Изобретение относится к транспортному, преимущественно сельскохозяйственному машиностроению и касается устройств, повышающих устойчивость транспортных средств,
Цель изобретения - расширение эксплуатационных и функциональных возможностей.
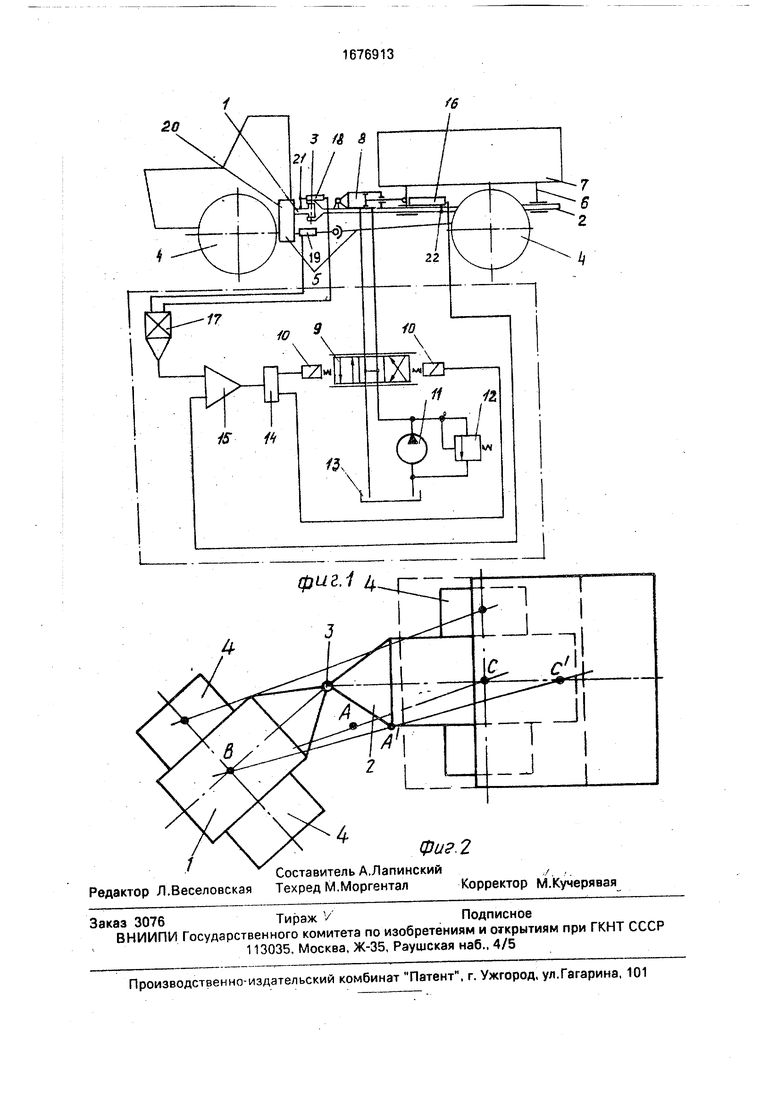
На фиг,1 изображены транспортное средство (вид сбоку) и принципиальная схема системы перемещения кузова; на фиг.2 - схема, поясняющая работу транспортного средства.
Транспортное средство содержит переднюю 1 и заднюю 2 полурамы, соединенные между собой вертикальным шарниром 3 и снабженные приводом поворота одна относительно другой от гидроцилиндра двустороннего действия. Опорные колеса 4 транспортного средства имеют привод от
трансмиссии 5. На задней полураме 2 с возможностью перемещения вдоль нее установлен подрамник 6, на котором закреплен кузов 7. Транспортное средство снабжено системой перемещения кузова 7 вдоль продольной, оси задней полурамы 2 включающей гидроцилиндр 8, рабочие полости которого подключены к распределителю 9, управляемому электромагнитами 10. При этом распределитель 9 сообщен с гидронасосом 11, снабженным предохранительным клапаном 12 и сливом 13. Обмотки электромагнитов 10 через усилитель 14 мощности подключены к выходу сумматора 15. К входам сумматора 15 подключены потенцио- метрический датчик 15 перемещения подрамника 6 с кузовом 7 и через блок 17 умножения датчик 18 угла поворо га полурам и датчик 19 скорости транспортного средства. Электромагниты 10, сумматор 15, блок
ч
о
Ч
17 умножения и датчики засчитываются от источнику постоянного тока (не показан). Датчиком 19 скорости транспортного средства является генератор постоянного тока (или тахогенератор), ротор которого связан с трансмиссией транспортного средства после коробки передач 20. Датчиком 18 угла поворота полурам является установленный на задней полураме 2 соосно с вертикальным шарниром 3 резистор с переменным сопротивлением, орган 21 управления которого связан с передней полурамой 1. Датчиком 16 перемещения кузова 7 является установленный на подрамнике б резистор переменного сопротивления, орган 22 управления которого связан с задней полурамой 2.
Сумматор 15 (блок суммирования) является стандартным электронным устройством, осуществляющим суммирование входных напряжений, Блок 17 умножения также является стандартным электронным устройством, осуществляющим перемножение входных сигналов,
Транспортное средство работает следующим образом.
При прямолинейном движении полурамы 1 и 2 транспортного средства расположены на одной прямой и сигнал датчика 18 равен нулю. Следовательно, на выходе блока 17 умножения сигнал также равен нулю независимо от величины сигнала датчика 19 скорости движения, Кузов 7 находится з положении, максимально сдвинутом вперед, при котором сигнал датчика 16 равен нулю, и на выходе сумматора 15 сигнал отсутствует, На обмотки электромагнитов 10 не поступает сигнал, поэтому распределитель 9 находится в среднем положении, при котором полости гидроцилиндра 8 заперты.
При движении транспортного средства по криволинейной траектории (например, поворот налево, полурамы 1 и 2 поворачиваются одна относительно другой. На выходе датчика 18 возникает сигнал, пропорциональный углу поворота полурам. На вход сумматора 15 поступает сигнал от датчика 18, умноженный посредством блока 17 умножения на сигнал датчика 19, который пропорционален скорости движения транспортного средства. При появлении сигнала от блока 17 умножения, отличного от нуля, в сумматоре 15 появляется сигнал, управляйте электромагнитами 10, которые перемещают золотник распределителя 9. Тем самым распределитель подключает соответствующие полости гидроцилиндра 8 к насосу 11 и сливу 13. Гидроцилиндр 8 перемещает подрамник 6 с кузовом 7 в продольном направлении назад. В результату
перемещения подрамника возникает сигнал от датчика 16, противоположный по знаку сигналу блока 17 умножения, и поступает на вход сумматор 15. Сигнал датчика 16 возрастает пропорционально перемещению подрамника 6; когда кузов сместится на определенную величину, сигнал датчика 16 будет равен сигналу блока 17 и, следовательно, на выходе сумматора 15 сиг0 нал становится равным нулю. На обмотки электромагнитов 10 не поступает сигнал, и золотник распределителя 9 устанавливается а среднее положение, запирая полости гидроцилиндра 8, В результате перемеще5 ния кузова назад центр тяжести С задней полурамы занимает положение С1 за осью заднего моста, центр тяжести А всего транспортного средства занимает положение А , что вызывает увеличение расстояние от об0 щего центра тяжести А до оси опрокидывания, проходящей через центры контактов наружных колес транспортного средства (фиг.2). Это повышает запас поперечной устойчивости транспортного средства.
5 При дальнейшем уменьшении радиуса поворота транспортного средства, т.е. при увеличении угла поворота полурам описанный процесс повторяется и подрамник 6 с кузовом 7 смещается еще больше назад.
0 При увеличении скорости транспортного средства во время поворота с постоянным радиусом увеличивается сигнал от датчика 19 и, следовательйо, увеличивается сигнал на выходе блока 17. В сумматоре 15 опять
5 появляется рассогласование, и сигнал поступает на обмотки электромагнитов 10, которые передвигают золотник распределителя 9, Соответствующие полости гидроцилиндра 8 вновь соединяются с
0 гидронасосом 11 и сливом 13, и перемещение назад подрамника 6 с кузовом 7 увеличивается. При уменьшении скорости прохождения поворота сигнал отдатчика 19 уменьшается и уменьшается сигнал на вы5 ходе блока 17. В сумматоре 15 возникает рассогласование, ко ык как сигнал от датчика 16 перемещения подрамника больше по абсолютному значению, но противоположен по знаку сигналу блока 17, то на выходе
0 сумматора возникает противоположный сигнал и электромагниты 10 перемещают золотник распределителя 9 в другую сторону, соединяя соответствующие полости гидроцилиндра 8 с насосом 11 и сливом 13, в
5 результате чего гидроцилиндр 8 перемещает подрамник 6 с кузовом 7 вперед. При увеличении радиуса, поворота, т.е. при уменьшении угла поворота полурам, уменьшается сигнал от датчика 18, и процесс повторяется.
При выходе транспортного средства из поворота, т.е. при возвращении полурам в положение, когда они расположены на одной прямой, сигнал от датчика 18 равен нулю и подрамник 6 с кузовом 7 возвращается в положение, соответствующее прямолинейному движению, т.е. максимально сдвинут вперед.
При повороте транспортного средства в другую сторону (направо) датчик 18 угла поворота полурам вырабатывает по значению такой же сигнал, как и при повороте налево. Устройство работает аналогично, и подрамник б с кузовом 7 также смещается назад.
При остановке транспортного средства независимо от складывания полурам подрамник 6 с кузовом 7 также находится в положении, максимально сдвинутом вперед, так как сигнал от датчика 19 скорости равен нулю, перемножение нуля в блоке 17 перемножения на любой сигнал датчика 18 на выходе блока 17 дает ноль.
Соответствие необходимого перемещения подрамника 6 с кузовом 7 углу поворота полурам и скорости движения транспортного средства обеспечивается выбором характеристик датчиков 18, 19 и 16, а также подбором передаточных чисел между механизмами и органами управления датчиками.
Использование устройства позволяет повысить устойчивость транспортного средства к опрокидыванию при криволинейном движении.
Формула изобретения 1. Двухзвенное транспортное средство, содержащее соединенные между собой шарниром с вертикальной осью переднюю и заднюю полурамы с мостами и приводом поворота их одна относительно другой, двигатель с трансмиссией, установленные на передней полураме, кузов, установленный на задней полураме, контргруз, установленный с возможностью перемещения относительно продольной оси транспортного средства в зависимости от угла поворота полурам посредством привода, отличающееся тем, что, с целью расширения эксплуатационных и функциональных возможностей, оно снабжено системой управления перемещение контргруза, представляющего собой кузов транспортного средства, включающей датчики поворота полурам и скорости, электрически
подключенные к входам блока умножения, потенциометрический датчик перемещения кузов относительно задней полурамы, сумматор, входы которого соединены с выходом блока перемножения и упомянутым
датчиком перемещения кузова, трехпозици- онный четырехлинейный электроуправляе- мый распределитель с открытием центром, линии управления которого подключены к выходу сумматора, и силовой цилиндр двустороннего действия, причем первая и вторая линии распределителя соединены с полостями силового цилиндра, третья линия - с резервуаром, а четвертая - с источником давления, при этом в одной из крайних позиций первая линия распределителя соединена с третьей, а вторая - с четвертой, а в другом крайнем положении первая линия соединена с четвертой, а вторая - с третьей,
2.Транспортное средство по п. 1. о т л и- чающееся тем, что датчик скорости
выполнен с виде тахогенератора, якорь которого кинематически связан с трансмиссией.
3.Транспортное средство поп.1, отл и- чающееся тем, что силовой цилиндр
выполнен в виде гидроцилиндра.
20
Фиг. 2
Составитель А.Лапинский,
Редактор Л.Веселовская Техред М.МоргенталКорректор М.Кучерявая
| название | год | авторы | номер документа |
|---|---|---|---|
| Двузвенное самосвальное транспортное средство | 1988 |
|
SU1537583A1 |
| Система рулевого управления транспортного средства | 1983 |
|
SU1133157A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С УСТРОЙСТВАМИ САМОЗАГРУЗКИ И САМОРАЗГРУЗКИ | 1990 |
|
RU2031016C1 |
| Самосвальный кузов транспортного средства | 1990 |
|
SU1782800A1 |
| Система рулевого управления транспортного средства | 1986 |
|
SU1324906A1 |
| Колесное транспортное средство для работы на склонах | 1987 |
|
SU1463523A1 |
| МАШИНА ДЛЯ ПОСЛОЙНОЙ РАЗРАБОТКИ ГРУНТА | 1997 |
|
RU2129193C1 |
| Система автоматического управления курсом движения колесной землеройно-транспортной машины | 1987 |
|
SU1514882A1 |
| Устройство для соединения полурам сочлененного транспортного средства | 1988 |
|
SU1546331A1 |
| Самосвальное транспортное средство | 1989 |
|
SU1657423A1 |
Изобретение относится к транспортному, преимущественно сельскохозяйственному машиностроению и касается устройств, повышающих устойчивость транспортных средств. Цель изобретения - расширение эксплуатационных и функциональных возможностей. Поставленная цель достигается тем, что в транспортном сред стве, оборудованном кузовом 7, последний установлен на задней полураме 2 с возможностью перемещения в продольном направлении и снабжен приводом перемещения от гидроцилиндра двустороннею действия, рабочие полости которого подключены к источнику давления и сливу черезтрехпозици- онный четырехлинейный распределитель управляемый двумя электромагнитами, обмотки которых подключены к аыходу сумматора, к входу которого подключен датчик перемещения кузова и через блок перемно жения датчик угла поворота полурам и датчик скорости транспортного средства. 2 з.п. ф-лы, 2 ил.
| Заявка ФРГ № 3622674, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
